一种垃圾收集建筑结构及其控制方法与流程
1.本发明涉及环保设备技术领域,具体为一种垃圾收集建筑结构及其控制方法。
背景技术:
2.垃圾屋是用来临时堆放垃圾的地方,一般会在垃圾屋内放置垃圾桶,当垃圾桶内的垃圾装满以后再将垃圾运走。现有垃圾屋一般为板房搭建,功能单一,可拓展能力不强,垃圾屋与一般的垃圾箱难以组合使用,增加采购和制造难度,并且,现有垃圾屋在使用过程中,由于垃圾未经过压缩处理,使垃圾桶的实际可用容量较小,需要频繁更换垃圾桶,同时,在投放垃圾时,垃圾桶的中的异味会散出,影响使用体验,针对上述问题,提出了本技术,针对上述问题,提出了本技术。
技术实现要素:
3.本发明的目的在于提供一种垃圾收集建筑结构及其控制方法,用于解决上述问题。
4.本发明是通过以下技术方案来实现的。
5.本发明的一种垃圾收集建筑结构,包括垃圾屋,所述垃圾屋上设有安装位,垃圾箱安装在所述安装位中,所述垃圾箱中设有用于放置垃圾桶的容纳空间,所述垃圾箱上开设有若干个投递口,所述投递口处安装有挡板,所述容纳空间中设有加盖组件,所述加盖组件中包括驱动组件和压板,所述驱动组件用于驱动所述压板升降,所述压板用于对垃圾桶加盖以及对桶内垃圾进行压缩,所述容纳空间朝向所述垃圾屋屋内方向设有开口,所述垃圾屋中设有移动组件,所述移动组件上设有夹持组件,所述移动组件与所述驱动组件电连接,所述驱动组件检测所述压板能够下降的最大高度判断垃圾桶中垃圾储量,所述移动组件根据所述驱动组件获取的垃圾储量信息对所述容纳空间中的垃圾桶进行更换。
6.进一步地,所述驱动组件包括动力组件,所述动力组件上安装有支撑杆和活动缸,所述支撑杆和活动缸的一端均与压板转动连接,所述活动缸与所述动力组件也为转动连接,所述动力组件用于驱动所述压板上下运动,所述垃圾箱中设有中间缸,所述中间缸与所述挡板连接,所述中间缸与所述活动缸通过管路连接,所述挡板开启时,活动缸收缩使压板一侧抬起,所述活动缸中设有用于使活塞复位的复位弹簧,所述驱动组件中还包括有压力检测组件。
7.进一步地,所述移动组件包括主体,所述垃圾屋中设有导轨,所述主体安装在所述导轨上,所述夹持组件包括至少两个对称设置的夹爪,所述主体中设有夹爪驱动结构。
8.进一步地,所述主体上安装有顶盖伸缩组件。
9.进一步地,所述管路中设有阀门组件,用于控制所述中间缸与所述活动缸是否连通,所述垃圾箱中设有距离检测组件与所述动力组件电连接。
10.进一步地,所述垃圾箱中设有除味吸附组件。
11.进一步地,所述垃圾箱上设有扫码模块。
12.进一步地,所述垃圾屋上设有洗手池、led显示屏和称重组件。
13.一种垃圾收集建筑结构控制方法,包括如下步骤:驱动组件驱动压板对垃圾桶内垃圾进行压缩,随着垃圾的增加,压板在驱动组件的作用下不断上升高度,当压板上升至设定高度后,此时判定为垃圾桶已到达最大储量,驱动组件向移动组件发出垃圾桶更换指令,移动组件通过夹持组件将垃圾箱中的垃圾桶运出至指定位置,然后将空的垃圾桶装入垃圾箱中。
14.进一步地,所述驱动组件驱动压板运动的具体步骤如下:动力组件驱动压板进入垃圾桶中,对垃圾进行压缩,在后续投放垃圾的过程中,所述挡板被推开后,中间缸中介质进入活动缸中,使压板靠近投递口一侧抬起,投递完成后,关闭挡板,在复位弹簧的作用下,所述压板恢复为水平状态,对垃圾进行常规压缩,常规压缩为无动力压缩,常规压缩中所述压板所受反作用力达到设定值时,压力检测组件向所述动力组件发出指令,动力组件驱动压板上升设定距离,对后续投入的垃圾继续进行常规压缩,当压板上升至设定高度后,动力组件向移动组件发出垃圾桶更换指令。
15.本发明的有益效果:通过将拼接式环保屋与垃圾箱组合形成垃圾屋,其中垃圾箱也可作为单独的户外垃圾箱使用,从而使垃圾屋的搭建更加便捷快速,同时垃圾箱的多场景适用性,采购时无需区分垃圾屋适配垃圾箱和室外单独垃圾箱,降低采购难度,使生产厂家无需准备多种类型的垃圾箱生产线,节省前期成本和设计成本。
16.通过设置加盖组件,在垃圾桶内垃圾到达一定量后,压板进入垃圾桶中,对垃圾桶进行遮盖,从而降低异味散出的速度,使用户在投递垃圾时,开启挡板的瞬间不会有大量异味溢出,保证用户体验,同时,将挡板和压板通过连接结构进行传动连接,实现了每次投放垃圾时,均能够对垃圾进行压缩,并且为无动力压缩,保证了垃圾桶容量的使用率。
17.通过在垃圾屋移动组件和加盖组件的配合,对垃圾桶中垃圾量进行检测,当垃圾桶中垃圾量达到设定值后,移动组件对垃圾桶进行自动更换,无需人工频繁更换垃圾桶,节省人工成本,装满垃圾的垃圾桶暂存在垃圾屋中,带后续统一进行处理,提高垃圾处理效率,进一步降低所需人力成本。
附图说明
18.为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
19.下面结合附图和实施例对本发明进一步说明。
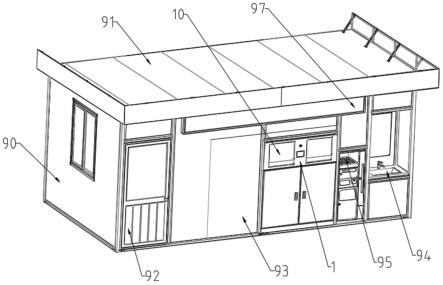
20.图1是本发明的垃圾收集建筑结构的整体结构示意图;
21.图2是垃圾收集建筑结构的左剖结构示意图;
22.图3是隐藏屋顶后垃圾收集建筑结构的俯视图;
23.图4是垃圾箱的结构示意图;
24.图5是垃圾箱的左侧剖视图;
25.图6是图5中挡板开启后的结构示意图;
26.图7为活动缸和中间缸连接方式示意图。
具体实施方式
27.下面结合图1-7对本发明进行详细说明。
28.本发明的一种垃圾收集建筑结构,包括垃圾屋90,如图1,整体框架由钢管钢结构拼装而成,固定方式为连接件螺栓固定。墙面由夹芯彩钢板与框架相固定安装,以插槽的拼接方式,两侧侧墙居中配有铝合金移窗,用于采光通风,正面配有铝合金材质的门92,用于进出,右侧配以洗手池94和镜子,供居民日常使用。正面上方挂有led显示屏97,用于宣传标语展示,垃圾屋的屋顶91处可安装太阳能板,为垃圾屋内设备供电。
29.所述垃圾屋90上设有安装位93,安装位93在未安装垃圾箱1时由若干块夹芯彩钢板墙面填充,此时垃圾屋90可作为其他用途使用,如物业、交通检查点等,根据所需安装的垃圾箱1的大小,拆卸一定数量的墙面,然后将垃圾箱1安装在所述安装位93中,如图5,所述垃圾箱1中设有用于放置垃圾桶5的容纳空间17,所述垃圾箱1上开设有若干个投递口19,本实施例中设有2个投递口,对应2个垃圾桶,分别收纳不同类型的垃圾,所述投递口19处安装有挡板10,挡板10通过合页安装,开启方式为向垃圾箱1内开启,所述垃圾箱1上安装有垃圾桶更换门11,工作人员也通过此门对垃圾桶5进行更换,垃圾箱1可单独作为室外或室内型垃圾箱使用。
30.所述容纳空间17中设有加盖组件2,如图5、6,所述加盖组件2中包括驱动组件和压板21,所述驱动组件用于驱动所述压板21升降,所述压板21用于对垃圾桶5加盖以及对桶内垃圾进行压缩,所述容纳空间17朝向所述垃圾屋90屋内方向设有开口171,用于后续垃圾桶的更换,所述垃圾屋90中设有移动组件3,所述移动组件3上设有夹持组件33,所述移动组件3与所述驱动组件电连接,所述驱动组件检测所述压板21能够下降的最大高度判断垃圾桶5中垃圾储量,所述移动组件3根据所述驱动组件获取的垃圾储量信息对所述容纳空间17中的垃圾桶5进行更换。
31.如图3,垃圾屋内设有工作区域,工作区域包括第一存放区域70和第二存放区域71,第一存放区域70和第二存放区域71分别用于放置空垃圾桶和已满垃圾桶。
32.所述驱动组件包括动力组件24,动力组件24为电缸、气缸或液压缸,所述动力组件24的伸缩端安装有架体,支撑杆22和活动缸23均安装在架体上,其中活动缸23与架体铰接安装,所述支撑杆22和活动缸23的一端均与压板21转动连接,支撑杆22和活动缸23分别连接在压板21上的两侧位置,所述动力组件用于驱动所述压板21上下运动,所述垃圾箱1中设有中间缸26,所述中间缸26与所述挡板10连接,所述中间缸26与所述活动缸23通过管路29连接,连接方式如图7所示,所述挡板10开启时,活动缸23收缩使压板21一侧抬起,所述活动缸23中设有用于使活塞复位的复位弹簧231,中间缸26和活动缸23均为液压缸,述驱动组件中还包括有压力检测组件,压力检测组件为设置在架体与动力组件24连接处的压力传感器,或设置在动力组件24中的压力感应组件,也可以设置在压板21处。
33.所述管路29中设有阀门组件,用于控制所述中间缸26与所述活动缸23是否连通。本实施例中阀门组件为电磁阀,阀门组件关闭后,中间缸26与所述活动缸23断开,可实现对挡板位置的保持,使其处于持续开启或关闭状态。
34.所述垃圾箱1中设有距离检测组件,为声波式距离检测传感器或红外线式距离传感器,用于检测垃圾桶内垃圾高度和/或压板所处高度。距离检测组件与所述动力组件24电连接,使用具体步骤:开启垃圾桶更换门11,将垃圾桶置于容纳空间17中;压板21位于所述
垃圾桶5上方,向垃圾桶内投放垃圾时,将挡板10开启后将分类后的垃圾投入相应的垃圾桶5中,距离检测组件检测到垃圾桶5中垃圾高度到达第一设定值后,距离检测组件向动力组件24发送指令,使动力组件24驱动压板21进入所述垃圾桶5中,对垃圾进行首次压缩,在后续投放垃圾的过程中,所述挡板10被推开后,中间缸26中介质进入活动缸23中,使压板21靠近投递口19一侧抬起,状态如图6所示,投递完成后,关闭挡板10,在复位弹簧231的作用下,所述压板21恢复为水平状态,对垃圾进行常规压缩,常规压缩为无动力压缩,常规压缩中所述压板21所受反作用力达到设定值时,压力检测组件向所述动力组件24发出指令,动力组件24驱动压板21上升设定距离,对后续投入的垃圾继续进行常规压缩,距离检测组件检测到垃圾桶5中垃圾高度到达第二设定值或动力组件带动压板上升至第二设定值高度后,阀门组件关闭,此时挡板10无法开启,无需继续向内投放垃圾。
35.如图3,所述移动组件3包括主体34,所述垃圾屋90中设有导轨4,导轨4为电动导轨,也可将主体34作为动力件,在主体底部设置沿导轨运动的轮,所述主体34安装在所述导轨4上,移动组件3仅需沿导轨进行固定轨迹的移动,降低控制难度,所述夹持组件33设置在主体上,夹持组件33包括至少两个对称设置的夹爪,所述主体34中设有夹爪驱动结构,夹爪驱动结构为液压缸、电缸或丝杠结构,本实施例中采用丝杠结构,通过电机驱动丝杠转动,进而驱动两个夹爪相互靠近和远离,实现对垃圾桶的夹持和放松,垃圾桶底部设有轮子,方便移动组件对垃圾桶进行运输。
36.另一种实施方式,主体34安装在传动带组件上,有传送带驱动主体进行运动。
37.主体34将垃圾箱内的垃圾桶运送至第二存放区域71处,然后将第一存放区域70的垃圾桶运送至垃圾箱内。
38.优选地,可在所述主体34中设有高度调整组件31,高度调整组件31为液压缸或电缸,在进行垃圾桶的运送时,高度调整组件31使主体上的部分升高,进而使夹持组件33将垃圾桶抬起,然后进行输送。
39.如图2,所述主体34上安装有顶盖伸缩组件32,在垃圾桶中装满后,移动组件3运输垃圾桶的过程中,顶盖伸缩组件32伸长,将垃圾桶的盖子向上顶,使其盖在桶上,在垃圾桶后续的暂存过程中避免异味散出。
40.如图6,所述垃圾箱1中在容纳空间的顶部位置处设有除味吸附组件15,如活性炭,可对垃圾桶散出的异味进行吸附,避免投递垃圾时开启挡板后大量异味溢出影响使用体验。
41.如图4,所述垃圾箱1上设有扫码模块101和称重组件95,在垃圾箱中或垃圾屋中设有网络传输组件,网络传输组件可通过安装sim卡实现联网或通过近场通讯如wifi方式联网,所述垃圾箱1上还扬声器组件,用户投放垃圾时,通过扫码模块联网识别后确定用户身份,利用称重组件95称量已分类垃圾重量,并通过扬声器组件13进行播报,实现对用户的积分处理。
42.所述投递口19处设有光幕检测组件,即检测光幕传感器,所述光幕检测组件与所述阀门组件电连接,当光幕检测组件检测到投递口处有物体存在时,发出指令,控制器接收到指令后向阀门组件发出关闭指令,使挡板10处于持续开启状态,避免夹手。
43.一种垃圾收集建筑结构控制方法,包括如下步骤:驱动组件驱动压板21对垃圾桶5内垃圾进行压缩,随着垃圾的增加,压板21在驱动组件的作用下不断上升高度,当压板21上
升至设定高度后,此时判定为垃圾桶5已到达最大储量,驱动组件向移动组件3发出垃圾桶更换指令,移动组件3通过夹持组件33将垃圾箱1中的垃圾桶运出至指定位置,然后将空的垃圾桶5装入垃圾箱1中。
44.所述驱动组件驱动压板21运动的具体步骤如下:动力组件24驱动压板21进入垃圾桶5中,对垃圾进行压缩,在后续投放垃圾的过程中,所述挡板10被推开后,中间缸26中介质进入活动缸23中,使压板21靠近投递口19一侧抬起,投递完成后,关闭挡板10,在复位弹簧231的作用下,所述压板21恢复为水平状态,对垃圾进行常规压缩,常规压缩为无动力压缩,常规压缩中所述压板21所受反作用力达到设定值时,压力检测组件向所述动力组件24发出指令,动力组件24驱动压板21上升设定距离,对后续投入的垃圾继续进行常规压缩,当压板21上升至设定高度后,动力组件24向移动组件3发出垃圾桶更换指令,更换之前,动力组件24驱动压板先从垃圾桶中撤出。
45.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1