具有定位功能的货叉装置的制作方法
本发明涉及物流搬运装置,更具体地,涉及具有定位功能的货叉装置。
背景技术:
1、起重机、叉车等搬运设备在自动运行过程中,普遍需要系统控制操作货叉对托盘货物进行装载与卸载,从而达到货叉对托盘货物的搬运,但因不同工况下,货叉组、要装卸的货物均会发生不同程度的定位误差,会对货叉准确装载托盘的精度造成影响;目前,在使用货叉装卸托盘货物自动运行中,普遍采用增加货叉与托盘容许误差范围等方式,来克服各种工况下货叉组与待载托盘位置偏差造成的影响,正常情况下的货叉与托盘之间的位置具体如图1所示,但因为托盘位置、自动控制定位偏差和人工视角不同等原因,造成的货叉装载托盘无法准确保障,产生异常情况,异常情况下,货叉与托盘之间的位置具体如图2所示,因此,自动化搬运设备的货叉在运行中放置货物时,常导致托盘货物偏离正确位置,造成搬运过程中的事故发生,或者放置货物不到位,造成后续工序无法进行,并可能损坏物流设备。
技术实现思路
1、本发明的目的在于提供具有准确定位功能的货叉装置,在起重机、叉车等搬运设备的货叉装载中,可以通过定位机构的几何计算,掌握货叉与托盘之间的位置关系,通过控制系统对货叉进行一定的自适应调节,对各种工况下货叉与托盘位置偏差因素进行了包容,确保货叉与托盘相对位置的准确性,使搬运设备的货叉获得准确的装载托盘位置。
2、为了实现上述目的,本发明采用以下技术方案:
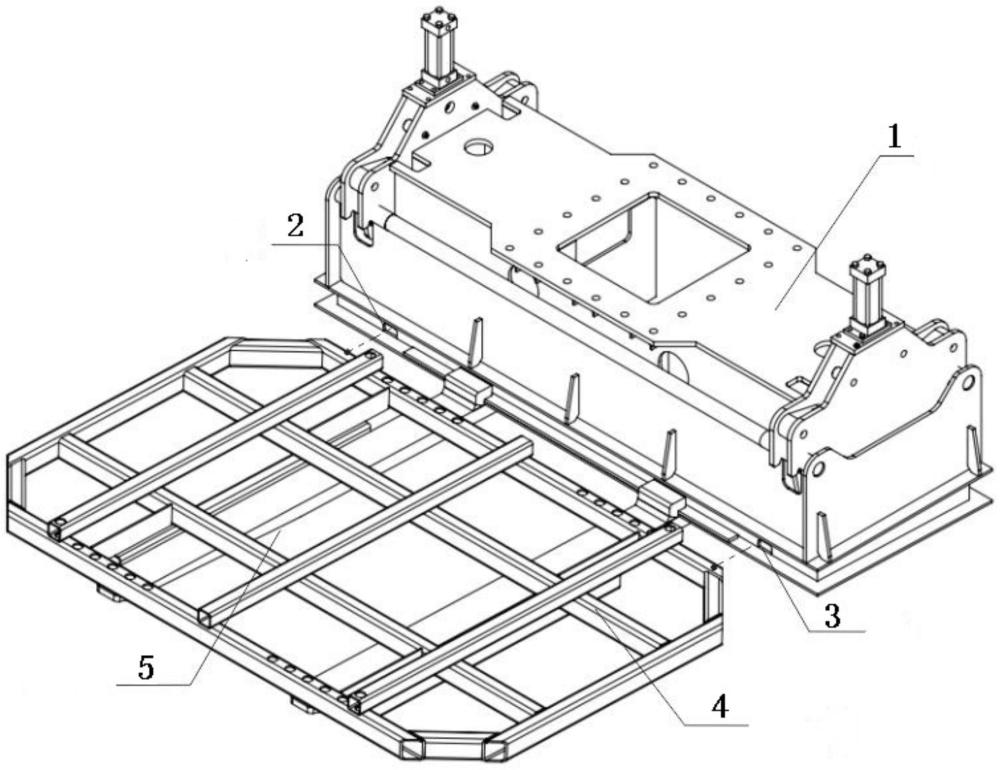
3、本发明提供了具有定位功能的货叉装置,包括货叉机构,设置在货叉机构上的定位机构以及托盘;所述货叉机构包括货叉组和设置在货叉组前端的两个平行的货叉,所述定位机构包括设置于所述货叉两侧且位于所述货叉组上的两个平行的激光测距仪,所述激光测距仪照射在所述托盘的边缘两侧的立面上,所述货叉延伸接在货叉组的前方。
4、进一步的,所述两个激光测距仪的探头发射的激光束与所述货叉平行。
5、进一步的,所述的货叉组上的装还设有可对激光束进行调控功率和平行度的控制系统。
6、进一步的,所述控制系统包括与所述定位机构数据连接的数据运算机构以及驱动所述货叉转动的旋转机构。
7、进一步的,所述数据运算机构的运算公式如下:
8、
9、其中:d为两个激光测距仪的激光头间距;l1、l2为货叉两侧激光头分别探测出的距离;α是根据几何关系反正切函数得出货叉取货面与托盘的夹角。
10、采用上述技术方案,本发明具有以下优点:
11、本发明提供了具有定位功能的货叉装置,通过货叉机构上的定位机构,在搬运设备行车运动的到预备入库的位置,可以通过货叉机构进行一定的自适应调节,在因托盘位置、自动控制定位偏差和人工视角不同等原因,造成的货叉装载托盘无法准确保障,产生异常情况下,对托盘与货叉组位置关系进行了测量,反馈给控制系统,通过控制系统对货叉进一步进行微调,确保了货叉与托盘相对位置的准确性,确保了货叉能够准确地装载托盘。
技术特征:
1.具有定位功能的货叉装置,包括货叉机构,设置在货叉机构上的定位机构以及托盘;所述货叉机构包括货叉组和设置在货叉组前端的两个平行的货叉,所述定位机构包括设置于所述货叉两侧且位于所述货叉组上的两个平行的激光测距仪,所述激光测距仪照射在所述托盘的边缘两侧的立面上,所述货叉延伸接在货叉组的前方。
2.如权利要求1所述的具有定位功能的货叉装置,其特征在于,所述两个激光测距仪的探头发射的激光束与所述货叉平行。
3.如权利要求1所述的具有定位功能的货叉装置,所述两个激光测距仪的探头发射的激光束与所述货叉平行。
4.如权利要求3所述的具有定位功能的货叉装置,其特征在于,所述控制系统包括与所述定位机构数据连接的数据运算机构以及驱动所述货叉转动的旋转机构。
5.如权利要求4所述的具有定位功能的货叉装置,其特征在于,所述数据运算机构的运算公式如下:
技术总结
本发明公开了具有定位功能的货叉装置,该货叉探测托盘定位装置包括货叉机构,设置在货叉机构上的定位机构以及与货叉机构探测连接的托盘;货叉机构包括货叉组和设置在货叉组前端的两个平行的货叉,定位机构包括设置于货叉两侧且位于货叉组上的两个平行的激光测距仪,激光测距仪照射在托盘的边缘两侧的立面上,货叉插接在托盘的下方。该货叉探测托盘定位装置通过定位机构,在搬运设备在货叉装载托盘无法准确保障,产生异常的情况下,对托盘与货叉组位置关系进行了测量,反馈给控制系统进一步进行微调,确保货叉能够准确地装载托盘。
技术研发人员:金惠忠
受保护的技术使用者:上海宝钢高强钢加工配送有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!