一种建筑铁丝捆扎器的制作方法
1.本发明涉及一种捆扎器,尤其涉及一种建筑铁丝捆扎器。
背景技术:
2.建筑施工中,许多地方都需要使用到大量的钢筋,在对刚钢筋进行运输时,为方便运输,工作人员需要用铁丝将钢筋捆扎在一起,使得铁丝将钢筋捆扎紧固。
3.目前,现有技术中的一种建筑铁丝捆扎器,一般包括有支脚和放料块,放料块左右两侧均设有两个支脚,工作人员将需要捆扎的钢筋放在放料块上,然后利用工具将铁丝截断后,再拿去绕在钢筋上,用工具将铁丝夹紧后转动将钢筋捆扎好,然而手动借助工具捆扎钢筋容易松动,而且操作起来也比较麻烦,并且手动拿取时,容易误伤工作人员。
4.因此,鉴于上述问题提供一种操作简单,提高安全性的建筑铁丝捆扎器。
技术实现要素:
5.为了克服手动借助工具捆扎钢筋操作起来也比较麻烦,且拿取铁丝时,容易误伤工作人员的缺点,本发明的技术问题是:提供一种操作简单,提高安全性的建筑铁丝捆扎器。
6.本发明的技术实施方案是:一种建筑铁丝捆扎器,包括有支脚、放料块、控制箱、进线轨道、第一支架、手把、旋转机构和移动机构,放料块左右两侧均设有两个支脚,放料块前侧下部设有控制箱,控制箱内安装有开关电源、电源模块和控制模块,开关电源为整个建筑铁丝捆扎器供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;放料块下侧设有第一支架,第一支架下侧设有进线轨道,第一支架顶部设有手把,第一支架上部设有用于扭铁丝来捆扎钢筋的旋转机构,旋转机构部件上设有用于将铁丝向内折弯的移动机构。
7.进一步的是,旋转机构包括有第一驱动电机、第二支架、旋转块和第一距离传感器,第一支架上部中间设有第一驱动电机,第一驱动电机与控制模块通过继电器控制模块连接,第一支架上部中间设有第二支架,第二支架中间转动式设有旋转块,旋转块位于进线轨道上方,旋转块顶部与第一驱动电机输出轴通过联轴器连接,旋转块左侧设有第一距离传感器,第一距离传感器与控制模块通过电性连接。
8.进一步的是,移动机构包括有减速电机、螺纹杆、第三支架、第一压力传感器、螺纹座、第一夹紧块、楔形块、触碰杆、第四支架、滑套和第一弹簧,旋转块下部后侧中间设有减速电机,减速电机与控制模块通过直流电机正反转模块连接,减速电机为双轴电机,旋转块下部后侧的左右两侧均设有第四支架,第四支架后侧均转动式设有螺纹杆,螺纹杆均与减速电机两侧的输出轴通过联轴器连接,旋转块内左侧设有第三支架,第三支架上部滑动式设有第一压力传感器,第一压力传感器与控制模块通过电性连接,旋转块左右两侧均前后对称滑动式设有螺纹座,螺纹座后侧均与同侧的螺纹杆螺纹式连接,相近的两个螺纹座下
侧之间均设有滑套,两个滑套前后两侧均滑动式设有用于夹紧铁丝两端的第一夹紧块,第一夹紧块外侧均设有楔形块,旋转块左右两侧均前后对称设有触碰杆,触碰杆均与同侧的楔形块接触,第一夹紧块均与同侧的螺纹座之间连接有第一弹簧。
9.进一步的是,还包括有用于对钢筋限位的限位机构,限位机构包括有触碰开关、第五支架、第一电动推杆、第一滑杆和第二夹紧块,控制箱右前侧设有触碰开关,触碰开关与控制模块通过电性连接,进线轨道左侧设有第五支架,第五支架左侧设有第一电动推杆,第一电动推杆与控制模块通过继电器控制模块连接,进线轨道右侧设有第一滑杆,第一滑杆上滑动式设有第二夹紧块,第二夹紧块底部左侧与第一电动推杆伸缩杆连接,第二夹紧块与放料块滑动式连接。
10.进一步的是,还包括有用于自动放铁丝的放料机构,放料机构包括有第二距离传感器、第一挡板、第六支架、放线轮、螺母、第七支架、第八支架、第二驱动电机、第一绕线轮和齿轮,第一滑杆右侧下部设有第二距离传感器,第二距离传感器与控制模块通过电性连接,第二夹紧块右侧中间设有第一挡板,旋转块顶部左侧设有第六支架,第六支架上部放置有放线轮,第六支架上部前侧螺纹式安装有螺母,旋转块左侧设有两个第七支架,后侧的第七支架右侧设有第八支架,第八支架后侧设有第二驱动电机,第二驱动电机与控制模块通过继电器控制模块连接,两个第七支架上部之间转动式设有两个第一绕线轮,右侧的第一绕线轮后侧与第二驱动电机输出轴通过联轴器连接,第一绕线轮前侧均设有齿轮,两个齿轮相互啮合。
11.进一步的是,还包括有用于避免铁丝弹出进线轨道的挡料机构,挡料机构包括有第九支架、第二电动推杆、第二滑杆、第二挡板和第三距离传感器,进线轨道左侧上部设有第九支架,第九支架上部设有第二电动推杆,第二电动推杆与控制模块通过继电器控制模块连接,进线轨道后侧上部的左右两侧均设有第二滑杆,第二滑杆之间滑动式设有第二挡板,第二挡板闭合进线轨道,第二挡板左侧与第二电动推杆伸缩杆连接,旋转块右侧设有第三距离传感器,第三距离传感器与控制模块通过电性连接。
12.进一步的是,还包括有用于裁断铁丝的裁断机构,裁断机构包括有第一刀片、第二刀片、第三电动推杆、第十支架和第二压力传感器,旋转块顶部左侧设有第一刀片,第三支架上设有第三电动推杆,第三电动推杆与控制模块通过继电器控制模块连接,第三电动推杆伸缩杆上设有第二刀片,左侧的第二滑杆后侧设有第十支架,第十支架左侧设有第二压力传感器,第二压力传感器与控制模块通过电性连接。
13.进一步的是,还包括有用于将捆扎后多余的铁丝截掉的切断机构,切断机构包括有连接块、第十一支架、刀具、第二绕线轮、拉绳和第二弹簧,第二夹紧块中间前后两侧均设有连接块,放料块顶部前后两侧均设有两个第十一支架,放料块顶部前后两侧均滑动式设有刀具,相近的两个第十一支架之间均转动式设有第二绕线轮,连接块顶部均与同侧的刀具之间连接有拉绳,刀具均与放料块之间连接有第二弹簧。
14.本发明具有如下优点:1、当第一电动推杆伸缩杆收缩带动第二夹紧块向下移动与钢筋接触时,进而对钢筋进行限位,避免钢筋在捆扎时出现滑动,导致钢筋捆扎不整齐;2、将铁丝一端卡进两个第一绕线轮之间后,当第一绕线轮转动时,进而带动铁丝穿在进线轨道上,如此无需人们手动将铁丝穿在进线轨道上,从而减少人工操作的麻烦;
3、当第二电动推杆伸缩杆收缩带动第二挡板向前移动时,使得第二挡板闭合进线轨道,如此当铁丝穿在进线轨道过程中,可避免铁丝弹出误伤工作人员;4、当第三电动推杆伸缩杆伸长带动第二刀片向左移动与铁丝接触时,进而配合第一刀片将铁丝裁断,如此无需人们手动将铁丝左侧裁断,进而减少人工工作量;5、刀具向内移动将捆扎后多余铁丝裁掉,如此无需人们手动借助裁断工具将多余的铁丝裁断,进而提高人工工作效率。
附图说明
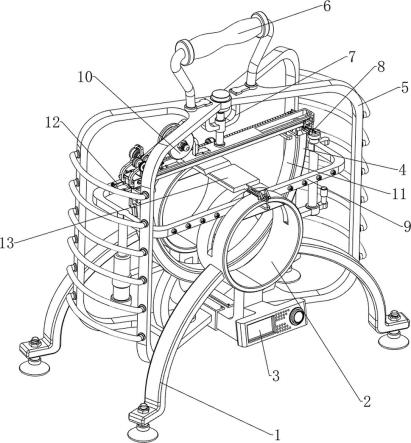
15.图1为本发明的立体结构示意图。
16.图2为本发明的部分立体结构示意图。
17.图3为本发明旋转机构的立体结构示意图。
18.图4为本发明旋转机构的部分立体结构示意图。
19.图5为本发明移动机构的立体结构示意图。
20.图6为本发明移动机构的第一部分立体结构示意图。
21.图7为本发明移动机构的第二部分立体结构示意图。
22.图8为本发明限位机构的立体结构示意图。
23.图9为本发明放料机构的立体结构示意图。
24.图10为本发明放料机构的部分立体结构示意图。
25.图11为本发明挡料机构的立体结构示意图。
26.图12为本发明挡料机构的部分立体结构示意图。
27.图13为本发明裁断机构的第一种立体结构示意图。
28.图14为本发明裁断机构的第二种立体结构示意图。
29.图15为本发明切断机构的立体结构示意图。
30.图16为本发明切断机构的部分立体结构示意图。
31.图17为本发明的电路框图。
32.图18为本发明的电路原理图。
33.以上附图中:1:支脚,2:放料块,3:控制箱,4:进线轨道,5:第一支架,6:手把,7:旋转机构,71:第一驱动电机,72:第二支架,73:旋转块,74:第一距离传感器,8:移动机构,81:减速电机,82:螺纹杆,83:第三支架,84:第一压力传感器,85:螺纹座,86:第一夹紧块,87:楔形块,88:触碰杆,89:第四支架,810:滑套,811:第一弹簧,9:限位机构,91:触碰开关,92:第五支架,93:第一电动推杆,94:第一滑杆,95:第二夹紧块,10:放料机构,101:第二距离传感器,102:第一挡板,103:第六支架,104:放线轮,105:螺母,106:第七支架,107:第八支架,108:第二驱动电机,109:第一绕线轮,1010:齿轮,11:挡料机构,111:第九支架,112:第二电动推杆,113:第二滑杆,114:第二挡板,115:第三距离传感器,12:裁断机构,121:第一刀片,122:第二刀片,123:第三电动推杆,124:第十支架,125:第二压力传感器,13:切断机构,131:连接块,132:第十一支架,133:刀具,134:第二绕线轮,135:拉绳,136:第二弹簧。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.实施例1一种建筑铁丝捆扎器,如图1-18所示,包括有支脚1、放料块2、控制箱3、进线轨道4、第一支架5、手把6、旋转机构7和移动机构8,放料块2左右两侧均设有两个支脚1,放料块2上半部分为用于放置钢筋的空心圆,放料块2前侧下部设有控制箱3,控制箱3内安装有开关电源、电源模块和控制模块,开关电源为整个建筑铁丝捆扎器供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,电源模块与控制模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;放料块2下侧通过螺栓固接有第一支架5,第一支架5下侧通过螺栓固接有进线轨道4,进线轨道4的形状为半弧形,第一支架5顶部设有手把6,第一支架5上部设有旋转机构7,旋转机构7部件上设有移动机构8。
36.旋转机构7包括有第一驱动电机71、第二支架72、旋转块73和第一距离传感器74,第一支架5上部中间设有第一驱动电机71,第一驱动电机71与控制模块通过继电器控制模块连接,第一支架5上部中间设有第二支架72,第二支架72中间通过轴承安装有旋转块73,旋转块73位于进线轨道4上方,旋转块73顶部与第一驱动电机71输出轴通过联轴器连接,旋转块73左侧通过螺栓固接有第一距离传感器74,第一距离传感器74与控制模块通过电性连接。
37.移动机构8包括有减速电机81、螺纹杆82、第三支架83、第一压力传感器84、螺纹座85、第一夹紧块86、楔形块87、触碰杆88、第四支架89、滑套810和第一弹簧811,旋转块73下部后侧中间设有减速电机81,减速电机81与控制模块通过直流电机正反转模块连接,减速电机81为双轴电机,旋转块73下部后侧的左右两侧均设有第四支架89,第四支架89后侧均通过轴承安装有螺纹杆82,螺纹杆82均与减速电机81两侧的输出轴通过联轴器连接,旋转块73内左侧设有第三支架83,第三支架83上部滑动式设有第一压力传感器84,第一压力传感器84与控制模块通过电性连接,旋转块73左右两侧均前后对称滑动式设有螺纹座85,螺纹座85后侧均与同侧的螺纹杆82螺纹式连接,相近的两个螺纹座85下侧之间均设有滑套810,两个滑套810前后两侧均滑动式设有第一夹紧块86,第一夹紧块86外侧均设有楔形块87,旋转块73左右两侧均前后对称设有触碰杆88,触碰杆88均与同侧的楔形块87接触,第一夹紧块86均与同侧的螺纹座85之间连接有第一弹簧811。
38.初始状态第一弹簧811被拉伸,使用本装置时,首先按下电源总开关将本设备上电,随后将需要捆扎的钢筋放在放料块2上,然后手动将铁丝穿在进线轨道4上,使得铁丝呈弧形绕过钢筋,接着手动接触第一压力传感器84,第一压力传感器84检测到压力达到预设值,控制模块控制减速电机81输出轴正转十秒后停止,减速电机81输出轴正转带动螺纹杆82正转,进而带动螺纹座85向内移动,螺纹座85带动滑套810向内移动,进而带动第一夹紧块86向内移动,第一夹紧块86带动楔形块87向内移动,当楔形块87与触碰杆88分离时,进而在第一弹簧811复位的作用下带动楔形块87和第一夹紧块86向内移动,使得第一夹紧块86夹紧铁丝两端,同时将铁丝向内折弯,减速电机81输出轴正转十秒后,第一距离传感器74检测到与右侧的滑套810之间的距离达到预设值,控制模块控制第一驱动电机71输出轴转动五秒后关闭,第一驱动电机71输出轴带动旋转块73转动,进而带动减速电机81、螺纹杆82、
第三支架83、第一压力传感器84、螺纹座85、第一夹紧块86、楔形块87、触碰杆88、第四支架89、滑套810、第一弹簧811和第一距离传感器74转动,使得铁丝两端扭转对钢筋进行捆扎,捆扎完毕后,再次手动接触第一压力传感器84,第一压力传感器84检测到压力达到预设值,控制模块控制减速电机81输出轴反转十秒后关闭,减速电机81输出轴反转带动螺纹杆82反转,进而带动螺纹座85向外移动,螺纹座85带动滑套810向外移动,进而带动第一夹紧块86向外移动,第一夹紧块86带动楔形块87向外移动复位,当楔形块87与触碰杆88接触时,进而使得楔形块87向外移动,楔形块87带动第一夹紧块86向外移动复位,第一弹簧811被拉伸,接着将被捆扎的钢筋取出,再手动借助裁断工具将多余的铁丝裁断即可,人们可以通过手动握住手把6来移动本设备,不需要使用本设备时,按下电源总开关将本设备断电即可。
39.还包括有限位机构9,限位机构9包括有触碰开关91、第五支架92、第一电动推杆93、第一滑杆94和第二夹紧块95,控制箱3右前侧设有触碰开关91,触碰开关91与控制模块通过电性连接,进线轨道4左侧设有第五支架92,第五支架92左侧设有第一电动推杆93,第一电动推杆93与控制模块通过继电器控制模块连接,进线轨道4右侧设有第一滑杆94,第一滑杆94上滑动式设有第二夹紧块95,第二夹紧块95中间前后两侧均为橡胶材质,第二夹紧块95底部左侧与第一电动推杆93伸缩杆连接,第二夹紧块95与放料块2滑动式连接。
40.手动触碰触碰开关91,控制模块控制第一电动推杆93伸缩杆收缩一秒后停止,第一电动推杆93伸缩杆收缩带动第二夹紧块95向下移动,当第二夹紧块95与钢筋接触时,进而对钢筋进行限位,避免钢筋在捆扎时出现滑动,导致钢筋捆扎不整齐,待钢筋捆扎完毕后,再次手动触碰触碰开关91,控制模块控制第一电动推杆93伸缩杆伸长一秒后关闭,第一电动推杆93伸缩杆伸长带动第二夹紧块95向上移动复位。
41.还包括有放料机构10,放料机构10包括有第二距离传感器101、第一挡板102、第六支架103、放线轮104、螺母105、第七支架106、第八支架107、第二驱动电机108、第一绕线轮109和齿轮1010,第一滑杆94右侧下部设有第二距离传感器101,第二距离传感器101与控制模块通过电性连接,第二夹紧块95右侧中间设有第一挡板102,旋转块73顶部左侧通过螺栓固接有第六支架103,第六支架103上部放置有放线轮104,第六支架103上部前侧螺纹式安装有螺母105,旋转块73左侧通过螺栓固接有两个第七支架106,后侧的第七支架106右侧设有第八支架107,第八支架107后侧设有第二驱动电机108,第二驱动电机108与控制模块通过继电器控制模块连接,两个第七支架106上部之间转动式设有两个第一绕线轮109,右侧的第一绕线轮109后侧与第二驱动电机108输出轴通过联轴器连接,第一绕线轮109前侧均设有齿轮1010,两个齿轮1010相互啮合。
42.转动螺母105,将螺母105取下,随后再将放线轮104取下来,将适量的铁丝绕在放线轮104上,接着复位放线轮104和螺母105,将铁丝一端卡进两个第一绕线轮109之间,第一绕线轮109与铁丝之间的摩擦力较大,当第二夹紧块95向下移动时,进而带动第一挡板102向下移动,第二距离传感器101检测到与第一挡板102之间的距离达到预设值,控制模块控制第二驱动电机108输出轴反转十五秒后关闭,第二驱动电机108输出轴反转带动右侧的第一绕线轮109反转,右侧的第一绕线轮109带动右侧的齿轮1010反转,进而带动左侧的齿轮1010正转,左侧的齿轮1010带动左侧的第一绕线轮109正转,进而使得铁丝穿在进线轨道4上,如此无需人们手动将铁丝穿在进线轨道4上,从而减少人工操作的麻烦,第二驱动电机108输出轴反转十五秒后,手动再将铁丝左侧裁断即可。
43.还包括有挡料机构11,挡料机构11包括有第九支架111、第二电动推杆112、第二滑杆113、第二挡板114和第三距离传感器115,进线轨道4左侧上部焊接有第九支架111,第九支架111上部设有第二电动推杆112,第二电动推杆112与控制模块通过继电器控制模块连接,进线轨道4后侧上部的左右两侧均设有第二滑杆113,第二滑杆113之间滑动式设有第二挡板114,第二挡板114闭合进线轨道4,第二挡板114左侧与第二电动推杆112伸缩杆连接,旋转块73右侧设有第三距离传感器115,第三距离传感器115与控制模块通过电性连接。
44.当铁丝穿在进线轨道4上右端与第三距离传感器115处于水平位置时,第三距离传感器115检测到与铁丝之间的距离达到预设值,控制模块控制第二电动推杆112伸缩杆伸长一秒后停止,第二电动推杆112伸缩杆伸长带动第二挡板114向后移动,当再次手动触碰触碰开关91时,控制模块控制第二电动推杆112伸缩杆收缩一秒后关闭,第二电动推杆112伸缩杆收缩带动第二挡板114向前移动,使得第二挡板114闭合进线轨道4,如此当铁丝穿在进线轨道4过程中,可避免铁丝弹出误伤工作人员。
45.还包括有裁断机构12,裁断机构12包括有第一刀片121、第二刀片122、第三电动推杆123、第十支架124和第二压力传感器125,旋转块73顶部左侧通过螺栓固接有第一刀片121,第三支架83上设有第三电动推杆123,第三电动推杆123与控制模块通过继电器控制模块连接,第三电动推杆123伸缩杆上设有第二刀片122,左侧的第二滑杆113后侧设有第十支架124,第十支架124左侧设有第二压力传感器125,第二压力传感器125与控制模块通过电性连接。
46.当第二挡板114向后移动触碰第二压力传感器125时,第二压力传感器125检测到压力达到预设值,控制模块控制第三电动推杆123伸缩杆伸长一秒再收缩1秒后关闭,第三电动推杆123伸缩杆伸长带动第二刀片122向左移动,当第二刀片122与铁丝接触时,进而配合第一刀片121将铁丝裁断,第三电动推杆123伸缩杆伸长一秒后,第三电动推杆123伸缩杆收缩带动第二刀片122向右移动复位,如此无需人们手动将铁丝左侧裁断。
47.还包括有切断机构13,切断机构13包括有连接块131、第十一支架132、刀具133、第二绕线轮134、拉绳135和第二弹簧136,第二夹紧块95中间前后两侧均设有连接块131,放料块2顶部前后两侧均设有两个第十一支架132,放料块2顶部前后两侧均滑动式设有刀具133,相近的两个第十一支架132之间均通过轴承连接有第二绕线轮134,连接块131顶部均与同侧的刀具133之间连接有拉绳135,刀具133均与放料块2之间连接有第二弹簧136。
48.当第二夹紧块95向下移动时,进而带动连接块131向下移动,连接块131通过拉绳135带动刀具133向外移动,第二弹簧136被压缩,当第二夹紧块95向上移动时,进而带动连接块131向上移动,拉绳135被放松,进而在第二弹簧136复位的作用下带动刀具133向内移动将捆扎后多余铁丝裁掉,如此无需人们手动借助裁断工具将多余的铁丝裁断。
49.最后所应当说明的是,以上实施例仅用以说明本发明的技术方案而非对本发明保护范围的限制,尽管参照较佳实施例对本发明作了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的实质和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1