一种智慧物联物流仓储平台系统的制作方法
1.本发明涉及物流仓储平台系统技术领域,具体为一种智慧物联物流仓储平台系统。
背景技术:
2.随着商业智能技术和云计算技术的发展,智能系统见诸于各工业应用领域,物流行业也在其中。随着电子商务和网络购物的盛行,物流需求空前巨大,催生了众多物流企业并带动了物流业的快速发展。
3.但是现有物流仓储平台系统需要人工手动进行扫描分类储存,从而浪费了大量的人力进行分类储存,并且现有的物流仓储平台系统对大物件进行分类输送到仓储货架内时,需要使用到叉车进行输送放置在仓储货架内,为此,我们提出一种智慧物联物流仓储平台系统。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种智慧物联物流仓储平台系统,解决了现有需要人工手动进行扫描分类储存,对大物件进行分类输送到仓储货架内时需要使用到叉车进行输送放置在仓储货架内的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种智慧物联物流仓储平台系统,包括底座,所述底座上端面左边缘处固定连接有第一支撑架,所述第一支撑架内腔设置有传送带,所述底座前后端面中部固定连接有固定架,所述固定架右端面上边缘处固定连接有u型支撑块,所述u型支撑块内腔通过转轴转动连接有连接块,所述连接块右端面固定连接有电动伸缩杆,所述电动伸缩杆通过输出轴固定连接有传动块,所述传动块通过转轴转动连接有h型拉动块。
8.作为本发明的进一步方案,所述底座前后端面均固定连接有固定杆,所述固定杆内部通过轴承转动连接有转动柱,所述转动柱外部均匀设置有限位块,所述转动柱外部通过限位块卡合连接有h型拉动块。
9.作为本发明的进一步方案,所述转动柱外部通过限位块卡合连接有转动块,所述转动块远离转动柱一端通过转轴转动连接有拉动杆,所述拉动杆远离转动块一端通过转轴转动连接有第一连接杆,所述第一连接杆远离拉动杆一端通过转轴转动连接有第二连接杆。
10.作为本发明的进一步方案,所述第一连接杆与第二连接杆通过转轴分别转动连接有第一输送带、第二输送带与第三输送带。
11.作为本发明的进一步方案,所述底座上端面右边缘处固定连接有第二支撑架,所述第二支撑架内腔通过转轴分别转动连接有第一输送带、第二输送带与第三输送带,所述
第一输送带、第二输送带与第三输送带后端面固定连接有第一皮带轮、第二皮带轮与第三皮带轮。
12.作为本发明的进一步方案,所述第一皮带轮通过皮带传动连接有第二皮带轮,所述第二皮带轮通过皮带传动连接第三皮带轮,所述第一输送带前端面安装有电机。
13.作为本发明的进一步方案,所述第二支撑架前端面对称固定连接有固定块,所述固定块内部通过轴承转动连接有双向螺纹杆,所述双向螺纹杆上端面分别固定连接有第一齿轮与第二齿轮。
14.作为本发明的进一步方案,所述双向螺纹杆外部螺纹连接有夹块,所述夹块内腔夹持连接有电机,所述固定块上端面中部通过轴承转动连接有齿盘,所述齿盘啮合连接有第一齿轮与第二齿轮。
15.作为本发明的进一步方案,所述第一支撑架内腔上边缘处固定连接有固定板,所述固定板相互靠近面设置有扫描探头,所述扫描探头通过导线信号连接外部主控制器。
16.(三)有益效果
17.本发明提供了一种智慧物联物流仓储平台系统。具备以下有益效果:
18.(1)、该便于维护的物流仓储平台系统,通过将电机放置在夹块上,然后握住把手转动齿盘传动第一齿轮与第二齿轮带动双向螺纹杆,使双向螺纹杆螺纹传动夹块对电机进行夹持固定,从而使电机的输出端与第一输送带进行安装固定,然后再通过电机的输出轴转动第一输送带传动第一皮带轮与皮带带动第二皮带轮,并使第二皮带轮利用皮带传动第三皮带轮带动第二输送带与第三输送带,从而便于对不同的物品进行输送分类储存,避免了现有智慧物联物流仓储平台系统需要人工手动进行扫描分类储存的麻烦。
19.(2)、该便于维护的物流仓储平台系统,通过电动伸缩杆的活塞杆推动传动块带动h型拉动块,然后再使h型拉动块利用限位块转动转动柱传动转动块拉动拉动杆,从而使拉动杆利用转轴拉动第一连接杆带动第二连接杆,并使第一连接杆与第二连接杆利用转轴拉动第一输送带、第二输送带与第三输送带,从而使第一输送带与传送带进行连接,从而便于对物品进行分类输送到仓储货架内,在对大物件进行输送仓储时,通过电动伸缩杆的活塞杆拉动传动块带动h型拉动块,再使h型拉动块利用限位块转动转动柱传动转动块推动拉动杆,然后使拉动杆利用转轴拉动第一连接杆带动第二连接杆向下进行移动,并使第一连接杆与第二连接杆利用转轴拉动第一输送带、第二输送带与第三输送带,从而使第三输送带与传送带进行连接,从而便于对大物件进行分类输送到仓储货架内,避免了现有智慧物联物流仓储平台系统对大物件进行分类输送到仓储货架内时,需要使用到叉车进行输送放置在仓储货架内的麻烦。
20.(3)、该便于维护的物流仓储平台系统,通过将物品放置在传送带上后,利用扫描探头对物品进行扫描录入,然后扫描探头对物品进行扫描录入的信息通过导线信号传输给外部主控制器,从而使外部主控制器进行控制电动伸缩杆调节第一输送带、第二输送带与第三输送带对物品进行输送整理,并且再通过利用外部主控制器控制pc端和服务器端进行更新物品的物流定位情况,从而便于物品的后期出库与运输情况。
附图说明
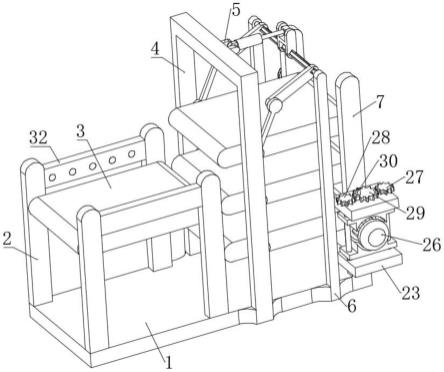
21.图1为本发明主视结构示意图;
22.图2为本发明后视结构示意图;
23.图3为本发明右视结构示意图;
24.图4为本发明底座半剖结构示意图;
25.图5为本发明传动块安装结构示意图;
26.图6为本发明电机安装结构示意图;
27.图7为本发明第二连接杆安装结构示意图;
28.图中:1、底座;2、第一支撑架;3、传送带;4、固定架;5、u型支撑块;6、固定杆;7、第二支撑架;8、第一输送带;9、第二输送带;10、第三输送带;11、第一皮带轮;12、第二皮带轮;13、第三皮带轮;14、电动伸缩杆;15、连接块;16、传动块;17、h型拉动块;18、转动柱;19、转动块;20、拉动杆;21、第一连接杆;22、第二连接杆;23、固定块;24、夹块;25、双向螺纹杆;26、电机;27、第一齿轮;28、第二齿轮;29、齿盘;30、把手;31、皮带;32、固定板;33、扫描探头;
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
30.请参阅图1-7,本发明提供一种技术方案:
31.一种智慧物联物流仓储平台系统,包括底座1,底座1上端面左边缘处固定连接有第一支撑架2,第一支撑架2内腔设置有传送带3,底座1前后端面中部固定连接有固定架4,固定架4右端面上边缘处固定连接有u型支撑块5,u型支撑块5内腔通过转轴转动连接有连接块15,连接块15右端面固定连接有电动伸缩杆14,电动伸缩杆14通过输出轴固定连接有传动块16,传动块16通过转轴转动连接有h型拉动块17。
32.本实施例中,底座1前后端面均固定连接有固定杆6,固定杆6内部通过轴承转动连接有转动柱18,转动柱18外部均匀设置有限位块,转动柱18外部通过限位块卡合连接有h型拉动块17。通过将电机26放置在夹块24上,然后握住把手30转动齿盘29传动第一齿轮27与第二齿轮28带动双向螺纹杆25,使双向螺纹杆25螺纹传动夹块24对电机26进行夹持固定,从而使电机26的输出端与第一输送带8进行安装固定,然后再通过电机26的输出轴转动第一输送带8传动第一皮带轮11与皮带31带动第二皮带轮12,并使第二皮带轮12利用皮带31传动第三皮带轮13带动第二输送带9与第三输送带10,从而便于对不同的物品进行输送分类储存,避免了现有智慧物联物流仓储平台系统需要人工手动进行扫描分类储存的麻烦。
33.本实施例中,转动柱18外部通过限位块卡合连接有转动块19,转动块19远离转动柱18一端通过转轴转动连接有拉动杆20,拉动杆20远离转动块19一端通过转轴转动连接有第一连接杆21,第一连接杆21远离拉动杆20一端通过转轴转动连接有第二连接杆22。
34.本实施例中,第一连接杆21与第二连接杆22通过转轴分别转动连接有第一输送带8、第二输送带9与第三输送带10。
35.本实施例中,底座1上端面右边缘处固定连接有第二支撑架7,第二支撑架7内腔通过转轴分别转动连接有第一输送带8、第二输送带9与第三输送带10,第一输送带8、第二输送带9与第三输送带10后端面固定连接有第一皮带轮11、第二皮带轮12与第三皮带轮13。通过电动伸缩杆14的活塞杆推动传动块16带动h型拉动块17,然后再使h型拉动块17利用限位
块转动转动柱18传动转动块19拉动拉动杆20,从而使拉动杆20利用转轴拉动第一连接杆21带动第二连接杆22,并使第一连接杆21与第二连接杆22利用转轴拉动第一输送带8、第二输送带9与第三输送带10,从而使第一输送带8与传送带3进行连接,从而便于对物品进行分类输送到仓储货架内,在对大物件进行输送仓储时,通过电动伸缩杆14的活塞杆拉动传动块16带动h型拉动块17,再使h型拉动块17利用限位块转动转动柱18传动转动块19推动拉动杆20,然后使拉动杆20利用转轴拉动第一连接杆21带动第二连接杆22向下进行移动,并使第一连接杆21与第二连接杆22利用转轴拉动第一输送带8、第二输送带9与第三输送带10,从而使第三输送带10与传送带3进行连接,从而便于对大物件进行分类输送到仓储货架内,避免了现有智慧物联物流仓储平台系统对大物件进行分类输送到仓储货架内时,需要使用到叉车进行输送放置在仓储货架内的麻烦。
36.本实施例中,第一皮带轮11通过皮带31传动连接有第二皮带轮12,第二皮带轮12通过皮带31传动连接第三皮带轮13,第一输送带8前端面安装有电机26。
37.本实施例中,第二支撑架7前端面对称固定连接有固定块23,固定块23内部通过轴承转动连接有双向螺纹杆25,双向螺纹杆25上端面分别固定连接有第一齿轮27与第二齿轮28。
38.本实施例中,双向螺纹杆25外部螺纹连接有夹块24,夹块24内腔夹持连接有电机26,固定块23上端面中部通过轴承转动连接有齿盘29,齿盘29啮合连接有第一齿轮27与第二齿轮28。
39.本实施例中,第一支撑架2内腔上边缘处固定连接有固定板32,固定板32相互靠近面设置有扫描探头33,扫描探头33通过导线信号连接外部主控制器。通过将物品放置在传送带3上后,利用扫描探头33对物品进行扫描录入,然后扫描探头33对物品进行扫描录入的信息通过导线信号传输给外部主控制器,从而使外部主控制器进行控制电动伸缩杆14调节第一输送带8、第二输送带9与第三输送带10对物品进行输送整理,并且再通过利用外部主控制器控制pc端和服务器端进行更新物品的物流定位情况,从而便于物品的后期出库与运输情况。
40.工作时,通过将物品放置在传送带3上后,利用扫描探头33对物品进行扫描录入,然后扫描探头33对物品进行扫描录入的信息通过导线信号传输给外部主控制器,从而使外部主控制器进行控制电动伸缩杆14的活塞杆推动传动块16带动h型拉动块17,然后再使h型拉动块17利用限位块转动转动柱18传动转动块19拉动拉动杆20,从而使拉动杆20利用转轴拉动第一连接杆21带动第二连接杆22,并使第一连接杆21与第二连接杆22利用转轴拉动第一输送带8、第二输送带9与第三输送带10,从而使第一输送带8与传送带3进行连接,从而便于对物品进行分类输送到仓储货架内,在对大物件进行输送仓储时,通过电动伸缩杆14的活塞杆拉动传动块16带动h型拉动块17,再使h型拉动块17利用限位块转动转动柱18传动转动块19推动拉动杆20,然后使拉动杆20利用转轴拉动第一连接杆21带动第二连接杆22向下进行移动,并使第一连接杆21与第二连接杆22利用转轴拉动第一输送带8、第二输送带9与第三输送带10,从而使第三输送带10与传送带3进行连接,从而便于对大物件进行分类输送到仓储货架内,避免了现有智慧物联物流仓储平台系统对大物件进行分类输送到仓储货架内时,需要使用到叉车进行输送放置在仓储货架内的麻烦。
41.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实
体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1