一种感应式智能装置及其使用方法与流程
1.本发明涉及一种感应式智能装置及其使用方法,特别涉及一种感应式智能装置及其使用方法,属于智能垃圾桶技术领域。
背景技术:
2.随着社会经济的快速发展,全国人民生活水平的快速提升,人们开始对于身边的智能产品越来越感兴趣。智能产品的目的是使人们提高生活舒适度和简便性,垃圾桶是存放垃圾的物件,也是家庭生活必不可少的家居物件,常见于家庭厨房等区域,而为了提升生活水平,智能垃圾桶技也慢慢走入人们的日常生活中。
3.而现有的智能垃圾桶在使用时,一般都是通过按动按钮才能开启自动开启垃圾桶的桶盖,而在倾倒垃圾时其受伤一般都会拿持有物品,从而使得部分时候按动按钮并不方便,而在按动按钮后在拿取垃圾时,部分时间开启时间不长的桶盖则会以及关闭,而长时间的开启则会使得餐厨垃圾的异味涌出而影响厨房的环境,而为了解决以上问题有必要提出一种感应式智能装置及其使用方法。
技术实现要素:
4.本发明提供一种感应式智能装置及其使用方法,有效的解决了现有技术中存在的问题。
5.为了解决上述技术问题,本发明提供了如下的技术方案:
6.本发明一种感应式智能装置,包括桶体机构,所述桶体机构的内部设置有一个伸展机构,所述伸展机构上放置有一个收纳机构,位于所述收纳机构上方位置上进料机构,所述桶体机构的内部设置有一个控制机构。
7.作为本发明的一种优选技术方案,所述桶体机构包括桶体,所述桶体的其中一侧槽比上开设有一个收纳槽,所述收纳槽的槽口处开设有一个开口,且所述收纳槽的上端槽壁上贯穿开设有一个进料口,所述进料口呈漏斗状设置,所述收纳槽靠近槽口的下端槽壁上开设有一个凹槽。
8.作为本发明的一种优选技术方案,所述伸展机构包括一块放置板,所述放置板滑动连接在收纳槽内,且所述放置板对应开口位置的上表面边缘处固定连接有一块挡板,所述挡板对应凹槽位置的下表面固定连接有两块支撑板,两块所述支撑板之间共同固定连接有一个转轴,所述转轴上固定套接有一个滚轮,所述放置板的外侧壁上开设有一个螺纹槽,对应所述螺纹槽位置的收纳槽槽壁上固定安装有一个第一驱动电机,所述第一驱动电机的输出端通过联轴器固定连接有一根螺纹杆,所述螺纹杆贯穿延伸至螺纹槽内,且所述螺纹杆与螺纹槽螺纹连接。
9.作为本发明的一种优选技术方案,所述收纳机构包括一个放置槽,所述放置槽开设在放置板的上表面,且所述放置槽内滑动连接有一个呈上端开口设置的收纳筒,所述收纳筒的外侧壁上开设有一个卡接槽,两个所述卡接槽内均通过转轴转动连接有一个把手,
位于两个所述卡接槽下方的收纳筒的侧壁内部开设有两个固定腔,两个所述固定腔与两个卡接槽之间共同贯穿开设有两个固定孔,两个所述固定腔内均滑动连接有一块固定块,两块所述固定块的上端均固定连接有一根固定绳,两根所述固定绳的上端均贯穿延伸至卡接槽内且固定连接在把手的下端,且两根所述固定绳上均套设有一个弹簧,两个所述弹簧的两端分别与固定腔的腔壁以及固定块相抵。
10.作为本发明的一种优选技术方案,所述进料机构包括一个滑槽,所述滑槽开设在进料口的侧壁上,且所述滑槽的其中一端槽口呈贯穿桶体的外侧壁设置,所述滑槽内滑动连接有一块密封板,所述密封板的上表面固定安装有一块压力传感器,所述滑槽的下端槽壁上开设有一个安装槽,所述安装槽的槽底固定安装有一个第二驱动电机,所述第二驱动电机的输出端通过联轴器固定连接有一根驱动杆,所述驱动杆远离第二驱动电机的一端固定安装有一个驱动齿轮,对应所述驱动齿轮位置的密封板下表面开设有一个齿条,所述驱动齿轮与齿条相啮合。
11.作为本发明的一种优选技术方案,所述控制机构包括一个控制器与按钮以及外接电源线,所述控制器固定安装在桶体的内壁中,所述按钮固定安装在桶体的上表面且所述控制器与按钮、第一驱动电机、第二驱动电机之间通过导线相连接,且所述外接电源线固定连接在控制器上。
12.作为本发明的一种优选技术方案,所述密封板其中一侧的边缘处呈倾斜状设置,且所述密封板的倾斜坡度与进料口的坡度相匹配。
13.一种感应式智能装置的使用方法,包括以下步骤:
14.第一步:在使用时,可以直接将垃圾倾倒在进料口内的密封板上,而密封板上的压力传感器感应到密封板有重量变化时,会将信号传递至控制器中,此时控制器会控制第二驱动电机启动并正转,而第二驱动电机会通过驱动杆驱动驱动齿轮进行转动,而驱动齿轮会通过与齿条的啮合驱动密封板移动,而密封板上的垃圾会被进料口的内壁格挡落下,从而使得垃圾会顺着进料口掉落至收纳筒套着的垃圾袋中,然后第二驱动电机会反转并驱动密封板复位,从而避免餐厨垃圾的异味会到处扩散;
15.第二步:在收纳筒套着的垃圾袋中垃圾装载较多时,可以按动按钮,而按钮会将信号传递至控制器中,此时控制器会控制第一驱动电机启动并正转,而第一驱动电机会驱动螺纹杆进行转动,而螺纹杆通过与螺纹槽的配合会驱动放置板向外移动,并直至收纳筒脱离收纳槽,而此时放置板的其中一端通过放置在收纳槽内进行支撑,而另一端通过滚轮在地面上对其进行支撑,从而方便通过把手拿取收纳筒并对齐内部的垃圾袋进行更换;
16.第三步:在更换垃圾袋时,可以通过转动把手将其将顶端转动至卡接槽外,从而使得把手脱离卡接槽并解除对垃圾袋边缘处的夹持,此时可以将垃圾袋的边缘处抽出,并将垃圾袋封闭后取出,然后再将更换的垃圾袋套在收纳筒上,然后再将垃圾袋的两侧边缘套设在两个卡接槽内,此时可以松开把手,而弹簧会向下推动固定块,而固定块会通过固定绳拉动把手,使得把手进入卡接槽并通过与卡接槽槽壁相抵来对垃圾袋进行夹持固定;
17.第四步:之后可以按动按钮,而按钮会将信号传递至控制器中,此时控制器会控制第一驱动电机启动并反转,而第一驱动电机会驱动螺纹杆进行转动,而螺纹杆通过与螺纹槽的配合会驱动放置板向内移动,使得放置板带动收纳筒移动至进料口的正下方,从而方便后续对餐厨垃圾进行接受。
18.本发明所达到的有益效果是:
19.1)本发明一种感应式智能装置,通过设置桶体机构、伸展机构、收纳机构、进料机构与控制机构,在使用时,可以直接将垃圾倾倒在进料口内的密封板上,而密封板上的压力传感器感应到密封板有重量变化时,会将信号传递至控制器中,此时控制器会控制第二驱动电机启动并正转,而第二驱动电机会通过驱动杆驱动驱动齿轮进行转动,而驱动齿轮会通过与齿条的啮合驱动密封板移动,而密封板上的垃圾会被进料口的内壁格挡落下,从而使得垃圾会顺着进料口掉落至收纳筒套着的垃圾袋中,然后第二驱动电机会反转并驱动密封板复位,从而避免餐厨垃圾的异味会到处扩散且方便垃圾的倾倒。
20.2)本发明一种感应式智能装置,通过设置桶体机构、伸展机构、收纳机构、进料机构与控制机构,在使用时,可以按动按钮来启动第一驱动电机将放置板以及收纳筒移动至桶体外,此时可以将收纳筒取出,然后通过转动把手将其将顶端转动至卡接槽外,从而使得把手脱离卡接槽并解除对垃圾袋边缘处的夹持,此时可以将垃圾袋的边缘处抽出,并将垃圾袋封闭后取出,然后再将更换的垃圾袋套在收纳筒上,然后再将垃圾袋的两侧边缘套设在两个卡接槽内,此时可以松开把手,而弹簧会向下推动固定块,而固定块会通过固定绳拉动把手,使得把手进入卡接槽并通过与卡接槽槽壁相抵来对垃圾袋进行夹持固定,然后可以启动第二驱动电机反转并驱动放置板以及收纳筒复位,从而可以对餐厨垃圾进行接受。
附图说明
21.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
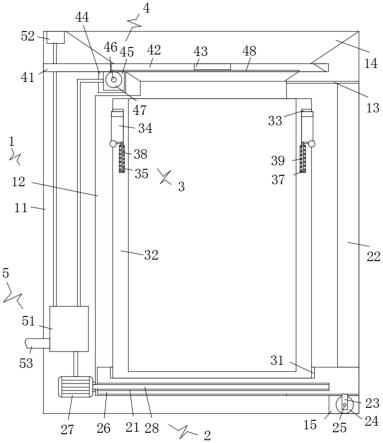
22.图1是本发明的待命状态结构示意图;
23.图2是本发明的垃圾袋更换状态结构示意图;
24.图3是本发明的垃圾进料状态结构示意图;
25.图4是本发明的收纳筒的结构示意图;
26.图5是本发明的图2中a部分的放大结构示意图。
27.图中:1、桶体机构;11、桶体;12、收纳槽;13、开口;14、进料口;15、凹槽;2、伸展机构;21、放置板;22、挡板;23、支撑块;24、转轴;25、滚轮;26、螺纹槽;27、第一驱动电机;28、螺纹杆;3、收纳机构;31、放置槽;32、收纳筒;33、卡接槽;34、把手;35、固定腔;36、固定孔;37、固定块;38、固定绳;39、弹簧;4、进料机构;41、滑槽;42、密封板;43、压力传感器;44、安装槽;45、第二驱动电机;46、驱动杆;47、驱动齿轮;48、齿条;5、控制机构;51、控制器;52、按钮;53、外接电源线。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例:如图1-5所示,本发明一种感应式智能装置及其使用方法,包括桶体机构1,桶体机构1的内部设置有一个伸展机构2,伸展机构2上放置有一个收纳机构3,位于收纳
机构3上方位置上进料机构4,桶体机构1的内部设置有一个控制机构5。
30.其中,桶体机构1包括桶体11,桶体11的其中一侧槽比上开设有一个收纳槽12,收纳槽12的槽口处开设有一个开口13,且收纳槽12的上端槽壁上贯穿开设有一个进料口14,进料口14呈漏斗状设置,收纳槽12靠近槽口的下端槽壁上开设有一个凹槽15。
31.其中,伸展机构2包括一块放置板21,放置板21滑动连接在收纳槽12内,且放置板21对应开口13位置的上表面边缘处固定连接有一块挡板22,挡板22对应凹槽15位置的下表面固定连接有两块支撑板23,两块支撑板23之间共同固定连接有一个转轴24,转轴24上固定套接有一个滚轮25,放置板21的外侧壁上开设有一个螺纹槽26,对应螺纹槽26位置的收纳槽12槽壁上固定安装有一个第一驱动电机27,第一驱动电机27的输出端通过联轴器固定连接有一根螺纹杆28,螺纹杆28贯穿延伸至螺纹槽26内,且螺纹杆28与螺纹槽26螺纹连接。
32.其中,收纳机构3包括一个放置槽31,放置槽31开设在放置板21的上表面,且放置槽31内滑动连接有一个呈上端开口设置的收纳筒32,收纳筒32的外侧壁上开设有一个卡接槽33,两个卡接槽33内均通过转轴转动连接有一个把手34,位于两个卡接槽33下方的收纳筒32的侧壁内部开设有两个固定腔35,两个固定腔35与两个卡接槽33之间共同贯穿开设有两个固定孔36,两个固定腔35内均滑动连接有一块固定块37,两块固定块37的上端均固定连接有一根固定绳38,两根固定绳38的上端均贯穿延伸至卡接槽33内且固定连接在把手34的下端,且两根固定绳38上均套设有一个弹簧39,两个弹簧39的两端分别与固定腔35的腔壁以及固定块37相抵。
33.其中,进料机构4包括一个滑槽41,滑槽41开设在进料口14的侧壁上,且滑槽41的其中一端槽口呈贯穿桶体11的外侧壁设置,滑槽41内滑动连接有一块密封板42,密封板42的上表面固定安装有一块压力传感器43,滑槽41的下端槽壁上开设有一个安装槽44,安装槽44的槽底固定安装有一个第二驱动电机45,第二驱动电机45的输出端通过联轴器固定连接有一根驱动杆46,驱动杆46远离第二驱动电机45的一端固定安装有一个驱动齿轮47,对应驱动齿轮47位置的密封板42下表面开设有一个齿条48,驱动齿轮47与齿条48相啮合。
34.其中,控制机构5包括一个控制器51与按钮52以及外接电源线53,控制器51固定安装在桶体11的内壁中,按钮52固定安装在桶体11的上表面且控制器51与按钮52、第一驱动电机27、第二驱动电机45之间通过导线相连接,且外接电源线53固定连接在控制器51上。
35.其中,密封板42其中一侧的边缘处呈倾斜状设置,且密封板42的倾斜坡度与进料口14的坡度相匹配。
36.一种感应式智能装置的使用方法,包括以下步骤:
37.第一步:在使用时,可以直接将垃圾倾倒在进料口14内的密封板42上,而密封板42上的压力传感器43感应到密封板42有重量变化时,会将信号传递至控制器51中,此时控制器51会控制第二驱动电机45启动并正转,而第二驱动电机45会通过驱动杆46驱动驱动齿轮47进行转动,而驱动齿轮47会通过与齿条48的啮合驱动密封板42移动,而密封板42上的垃圾会被进料口14的内壁格挡落下,从而使得垃圾会顺着进料口14掉落至收纳筒32套着的垃圾袋中,然后第二驱动电机45会反转并驱动密封板42复位,从而避免餐厨垃圾的异味会到处扩散;
38.第二步:在收纳筒32套着的垃圾袋中垃圾装载较多时,可以按动按钮52,而按钮52会将信号传递至控制器51中,此时控制器51会控制第一驱动电机27启动并正转,而第一驱
动电机27会驱动螺纹杆28进行转动,而螺纹杆28通过与螺纹槽26的配合会驱动放置板21向外移动,并直至收纳筒32脱离收纳槽12,而此时放置板21的其中一端通过放置在收纳槽12内进行支撑,而另一端通过滚轮25在地面上对其进行支撑,从而方便通过把手34拿取收纳筒32并对齐内部的垃圾袋进行更换;
39.第三步:在更换垃圾袋时,可以通过转动把手34将其将顶端转动至卡接槽33外,从而使得把手34脱离卡接槽33并解除对垃圾袋边缘处的夹持,此时可以将垃圾袋的边缘处抽出,并将垃圾袋封闭后取出,然后再将更换的垃圾袋套在收纳筒32上,然后再将垃圾袋的两侧边缘套设在两个卡接槽33内,此时可以松开把手34,而弹簧39会向下推动固定块37,而固定块37会通过固定绳38拉动把手34,使得把手34进入卡接槽33并通过与卡接槽33槽壁相抵来对垃圾袋进行夹持固定;
40.第四步:之后可以按动按钮52,而按钮52会将信号传递至控制器51中,此时控制器51会控制第一驱动电机27启动并反转,而第一驱动电机27会驱动螺纹杆28进行转动,而螺纹杆28通过与螺纹槽26的配合会驱动放置板21向内移动,使得放置板21带动收纳筒32移动至进料口14的正下方,从而方便后续对餐厨垃圾进行接受。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1