控制方法、装置及存储介质与流程
本技术涉及自动控制,尤其涉及一种控制方法、装置及存储介质。
背景技术:
1、生产线中的基板不一定都是对齐的,基板在流水作业的各个环节中可能会产生位置偏移,这样采用搬运机器人搬运基板时,基板在搬运机器人上的位置则会发生偏移,如果不及时校正,会造成产品质量不良甚至基板或设备损坏等严重后果。
2、然而,每个偏移基板的偏移位置各有不同,例如不同基板的偏移程度不同,或者,不同基板存在不同的偏移方向等。因此,搬运机器人在搬运前需要对每个基板进行校正,校正完成后才能进行搬移。这样一来,造成现有技术对偏移基板的调整效率较低、且误差较大。
技术实现思路
1、本技术提供一种控制方法、装置及存储介质,用于高效、精准地控制搬运机器人对基板的位置进行校正。
2、为达到上述目的,本技术采用如下技术方案:
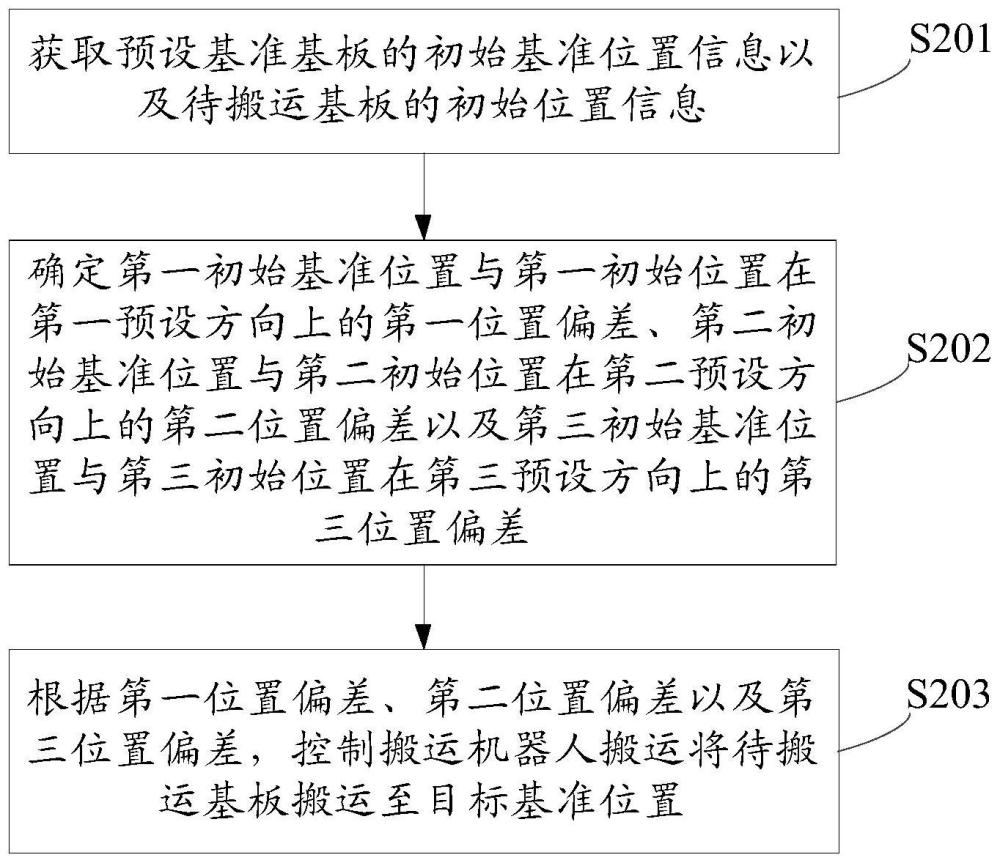
3、第一方面,提供一种控制方法,应用于搬运机器人,方法包括:获取预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息;初始基准位置信息包括预设基准基板在第一预设方向上的第一初始基准位置、预设基准基板在第二预设方向上的第二初始基准位置以及预设基准基板在第三预设方向上的第三初始基准位置;初始位置信息包括待搬运基板在第一预设方向上的第一初始位置、待搬运基板在第二预设方向上的第二初始位置以及待搬运基板在第三预设方向上的第三初始位置;确定第一初始基准位置与第一初始位置在第一预设方向上的第一位置偏差、第二初始基准位置与第二初始位置在第二预设方向上的第二位置偏差以及第三初始基准位置与第三初始位置在第三预设方向上的第三位置偏差;根据第一位置偏差、第二位置偏差以及第三位置偏差,控制搬运机器人搬运将待搬运基板搬运至目标基准位置。
4、可选的,根据第一位置偏差、第二位置偏差以及第三位置偏差,控制搬运机器人搬运将待搬运基板搬运至目标基准位置,包括:获取目标基准位置对应的目标基准位置信息;目标基准位置信息包括预设基准基板在第一预设方向上的第一目标基准位置、预设基准基板在第二预设方向上的第二目标基准位置以及预设基准基板在第三预设方向上的第三目标基准位置;根据第一位置偏差和第一目标基准位置,确定第一修正位置,根据第二位置偏差和第二目标基准位置,确定第二修正位置,以及,根据第三位置偏差和第三目标基准位置,确定第三修正位置;根据第一修正位置、第二修正位置以及第三修正位置,对搬运机器人进行修正,以使搬运机器人将待搬运基板搬运至目标基准位置。
5、可选的,搬运机器人包括可伸缩手臂,根据第一修正位置、第二修正位置以及第三修正位置,对搬运机器人进行修正,以使搬运机器人搬运将待搬运基板搬运至目标基准位置,包括:控制所述搬运机器人在所述第二预设方向上修正至所述第二修正位置,并控制所述搬运机器人在所述第三预设方向上修正至所述第三修正位置;当所述搬运机器人完成所述第二修正位置和所述第三修正位置的修正后,控制所述搬运机器人的所述可伸缩手臂在所述第一预设方向上修正至所述第一修正位置,以将所述待搬运基板放置所述目标基准位置。
6、可选的,获取预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息,包括:通过搬运机器人上部署的预设传感器,测量预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息。
7、第二方面,提供一种控制装置,应用于搬运机器人,控制装置包括获取单元、确定单元以及控制单元;获取单元,用于获取预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息;初始基准位置信息包括预设基准基板在第一预设方向上的第一初始基准位置、预设基准基板在第二预设方向上的第二初始基准位置以及预设基准基板在第三预设方向上的第三初始基准位置;初始位置信息包括待搬运基板在第一预设方向上的第一初始位置、待搬运基板在第二预设方向上的第二初始位置以及待搬运基板在第三预设方向上的第三初始位置;确定单元,用于确定第一初始基准位置与第一初始位置在第一预设方向上的第一位置偏差、第二初始基准位置与第二初始位置在第二预设方向上的第二位置偏差以及第三初始基准位置与第三初始位置在第三预设方向上的第三位置偏差;控制单元,用于根据第一位置偏差、第二位置偏差以及第三位置偏差,控制搬运机器人将待搬运基板搬运至目标基准位置。
8、可选的,控制单元,具体用于:获取目标基准位置对应的目标基准位置信息;目标基准位置信息包括预设基准基板在第一预设方向上的第一目标基准位置、预设基准基板在第二预设方向上的第二目标基准位置以及预设基准基板在第三预设方向上的第三目标基准位置;根据第一位置偏差和第一目标基准位置,确定第一修正位置,根据第二位置偏差和第二目标基准位置,确定第二修正位置,以及,根据第三位置偏差和第三目标基准位置,确定第三修正位置;根据第一修正位置、第二修正位置以及第三修正位置,对搬运机器人进行修正,以使搬运机器人将待搬运基板搬运至目标基准位置。
9、可选的,控制单元,具体用于:控制所述搬运机器人在所述第二预设方向上修正至所述第二修正位置,并控制所述搬运机器人在所述第三预设方向上修正至所述第三修正位置;当所述搬运机器人完成所述第二修正位置和所述第三修正位置的修正后,控制所述搬运机器人的所述可伸缩手臂在所述第一预设方向上修正至所述第一修正位置,以将所述待搬运基板放置所述目标基准位置。
10、可选的,获取单元,具体用于:通过搬运机器人上部署的预设传感器,测量预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息。
11、第三方面,提供一种控制装置,应用于搬运机器人,控制装置包括:处理器、用于存储处理器可执行的指令的存储器;其中,处理器被配置为执行指令,以实现上述第一方面的控制方法。
12、第四方面,提供一种计算机可读存储介质,计算机可读存储介质上存储有指令,当计算机可读存储介质中的指令由控制装置的处理器执行时,使得装置能够执行如上述第一方面的控制方法。
13、本技术实施例提供的技术方案至少带来以下有益效果:控制装置获取预设基准基板的初始基准位置信息以及待搬运基板的初始位置信息。由于初始基准位置信息包括预设基准基板在第一预设方向上的第一初始基准位置、预设基准基板在第二预设方向上的第二初始基准位置以及预设基准基板在第三预设方向上的第三初始基准位置;初始位置信息包括待搬运基板在第一预设方向上的第一初始位置、待搬运基板在第二预设方向上的第二初始位置以及待搬运基板在第三预设方向上的第三初始位置;因此,控制装置可以同时确定到第一初始基准位置与第一初始位置在第一预设方向上的第一位置偏差、第二初始基准位置与第二初始位置在第二预设方向上的第二位置偏差以及第三初始基准位置与第三初始位置在第三预设方向上的第三位置偏差。进一步的,控制装置根据第一位置偏差、第二位置偏差以及第三位置偏差,控制搬运机器人搬运将待搬运基板搬运至目标基准位置。这样一来,本技术可以同时根据三个方向的位置偏差完成对待搬运基板的校正,且该校正过程位于正常的基板搬运过程中,无需额外增加校正时间,实现了搬运机器人对基板高效、精准地校正。
- 还没有人留言评论。精彩留言会获得点赞!