图像处理方法、装置、设备和存储介质与流程
本发明涉及图像处理,尤其涉及一种图像处理方法、装置、设备和存储介质。
背景技术:
1、红外成像可以直观的反应被监控物体表面的温度场分布。由于宏观物理层面温度场分布的连续性,被监测物体表面温度差异小等特性,导致了红外探测器输出的裸图像通常具有对比度较低,边缘信息差等缺陷。因此,红外图像需要经过一系列图像增强算法来提升其可辨识度。
2、目前,通常是基于直方图均衡的对比度增强技术,通过改变各灰度级的统计分布,使一定灰度范围内的像素分布更加均匀,达到提升图像对比度的效果。
3、然而,该方法需要精确到每个灰度值的统计直方图。对数据位深度极高的红外图像而言,精确的直方图统计将产生很大的硬件消耗;如果强行降低灰度直方图的精度,会导致大量低频度出现的灰度值与其他灰度值融合,造成严重的细节损失。
技术实现思路
1、本发明提供一种图像处理方法、装置、设备和存储介质,用以解决现有技术中在进行图像对比度提升时,硬件消耗大、且提升对比度后的图像细节发生损失的缺陷,实现了降低硬件消耗的基础上,还可以有效保护图像细节,提高对比度增强精度的目的。
2、本发明提供一种图像处理方法,包括:
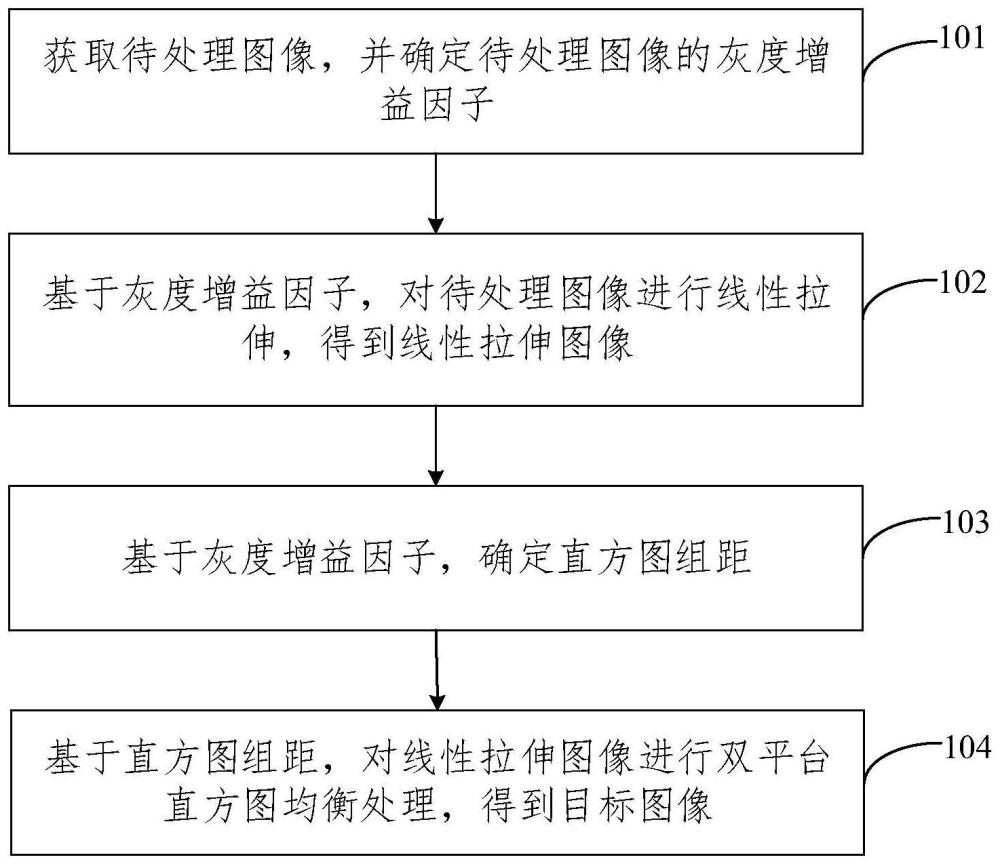
3、获取待处理图像,并确定所述待处理图像的灰度增益因子;
4、基于所述灰度增益因子,对所述待处理图像进行线性拉伸,得到线性拉伸图像;
5、基于所述灰度增益因子,确定直方图组距;其中,所述直方图组距小于或等于所述灰度增益因子;
6、基于所述直方图组距,对所述线性拉伸图像进行双平台直方图均衡处理,得到目标图像。
7、根据本发明提供的一种图像处理方法,所述确定所述待处理图像的灰度增益因子,包括:
8、基于所述待处理图像的宽度和高度,确定所述待处理图像的灰度均值和灰度标准差;
9、基于所述灰度均值和所述灰度标准差,确定至少一个灰度分割点;
10、基于所述待处理图像的最小灰度、最大灰度和所述至少一个灰度分割点,确定多个灰度区间;
11、分别确定每个灰度区间的区间端点各自对应的第一输入灰度和第一输出灰度;
12、基于所述每个灰度区间对应的区间端点各自对应的第一输入灰度和所述第一输出灰度,确定所述每个灰度区间对应的灰度增益因子。
13、根据本发明提供的一种图像处理方法,所述分别确定每个灰度区间的区间端点各自对应的第一输出灰度,包括:
14、根据所述待处理图像中的灰度级总数,确定目标灰度;
15、基于所述灰度级总数、所述灰度标准差和所述目标灰度,分别确定每个灰度区间的区间端点各自对应的第一输出灰度。
16、根据本发明提供的一种图像处理方法,所述基于所述灰度增益因子,对所述待处理图像进行线性拉伸,得到线性拉伸图像,包括:
17、遍历所述待处理图像中的每个像素点,确定各所述像素点的第二输入灰度所属的目标灰度区间;
18、基于所述目标灰度区间对应的灰度增益因子,确定所述第二输入灰度对应的第二输出灰度;
19、将所述待处理图像中各像素点由第二输入灰度映射至第二输出灰度,以对所述待处理图像进行线性拉伸,得到所述线性拉伸图像。
20、根据本发明提供的一种图像处理方法,所述基于所述直方图组距,对所述线性拉伸图像进行双平台直方图均衡处理,得到目标图像,包括:
21、基于所述直方图组距,确定直方图中每个分组的边缘灰度;
22、基于所述每个分组的边缘灰度和所述线性拉伸图像中每个像素点的第三输入灰度,确定所述线性拉伸图像的灰度直方图;
23、对所述灰度直方图进行双平台直方图均衡处理,得到修正直方图;
24、基于所述修正直方图,确定灰度映射曲线,所述灰度映射曲线用于表征输入灰度和输出灰度之间的对应关系;
25、基于所述灰度映射曲线和所述线性拉伸图像中每个像素点的第三输入灰度,确定目标图像。
26、根据本发明提供的一种图像处理方法,所述基于所述灰度映射曲线和所述线性拉伸图像中每个像素点的第三输入灰度,确定目标图像,包括:
27、基于所述直方图组距,确定压缩位深度;
28、将所述线性拉伸图像中每个像素点的第三输入灰度、所述灰度映射曲线中输入灰度和输出灰度均压缩所述压缩位深度;
29、基于压缩后的灰度映射曲线,将压缩后的线性拉伸图像中每个像素点的第四输入灰度映射至第四输出灰度,得到目标图像。
30、根据本发明提供的一种图像处理方法,所述基于所述灰度映射曲线和所述线性拉伸图像中每个像素点的第三输入灰度,确定目标图像,包括:
31、针对所述线性拉伸图像中每个像素点的第三输入灰度,在所述灰度映射曲线中进行插值,以确定所述每个像素点的第三输入灰度对应的第三输出灰度,得到目标图像。
32、本发明还提供一种图像处理装置,包括:
33、获取模块,用于获取待处理图像;
34、确定模块,用于确定所述待处理图像的灰度增益因子;
35、拉伸模块,用于基于所述灰度增益因子,对所述待处理图像进行线性拉伸,得到线性拉伸图像;
36、所述确定模块,还用于基于所述灰度增益因子,确定直方图组距;其中,所述直方图组距小于或等于所述灰度增益因子;
37、处理模块,用于基于所述直方图组距,对所述线性拉伸图像进行双平台直方图均衡处理,得到目标图像。
38、根据本发明提供的一种图像处理装置,所述确定模块,具体用于:
39、基于所述待处理图像的宽度和高度,确定所述待处理图像的灰度均值和灰度标准差;
40、基于所述灰度均值和所述灰度标准差,确定至少一个灰度分割点;
41、基于所述待处理图像的最小灰度、最大灰度和所述至少一个灰度分割点,确定多个灰度区间;
42、分别确定每个灰度区间的区间端点各自对应的第一输入灰度和第一输出灰度;
43、基于所述每个灰度区间对应的区间端点各自对应的第一输入灰度和所述第一输出灰度,确定所述每个灰度区间对应的灰度增益因子。
44、根据本发明提供的一种图像处理装置,所述确定模块,具体用于:
45、根据所述待处理图像中的灰度级总数,确定目标灰度;
46、基于所述灰度级总数、所述灰度标准差和所述目标灰度,分别确定每个灰度区间的区间端点各自对应的第一输出灰度。
47、根据本发明提供的一种图像处理装置,所述拉伸模块,具体用于:
48、遍历所述待处理图像中的每个像素点,确定各所述像素点的第二输入灰度所属的目标灰度区间;
49、基于所述目标灰度区间对应的灰度增益因子,确定所述第二输入灰度对应的第二输出灰度;
50、将所述待处理图像中各像素点由第二输入灰度映射至第二输出灰度,以对所述待处理图像进行线性拉伸,得到所述线性拉伸图像。
51、根据本发明提供的一种图像处理装置,所述处理模块,具体用于:
52、基于所述直方图组距,确定直方图中每个分组的边缘灰度;
53、基于所述每个分组的边缘灰度和所述线性拉伸图像中每个像素点的第三输入灰度,确定所述线性拉伸图像的灰度直方图;
54、对所述灰度直方图进行双平台直方图均衡处理,得到修正直方图;
55、基于所述修正直方图,确定灰度映射曲线,所述灰度映射曲线用于表征输入灰度和输出灰度之间的对应关系;
56、基于所述灰度映射曲线和所述线性拉伸图像中每个像素点的第三输入灰度,确定目标图像。
57、根据本发明提供的一种图像处理装置,所述处理模块,具体用于:
58、基于所述直方图组距,确定压缩位深度;
59、将所述线性拉伸图像中每个像素点的第三输入灰度、所述灰度映射曲线中输入灰度和输出灰度均压缩所述压缩位深度;
60、基于压缩后的灰度映射曲线,将压缩后的线性拉伸图像中每个像素点的第四输入灰度映射至第四输出灰度,得到目标图像。
61、根据本发明提供的一种图像处理装置,所述处理模块,具体用于:
62、针对所述线性拉伸图像中每个像素点的第三输入灰度,在所述灰度映射曲线中进行插值,以确定所述每个像素点的第三输入灰度对应的第三输出灰度,得到目标图像。
63、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述图像处理方法。
64、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述图像处理方法。
65、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述图像处理方法。
66、本发明提供的图像处理方法、装置、设备和存储介质,通过获取待处理图像,并确定待处理图像的灰度增益因子,基于该灰度增益因子,对待处理图像进行线性拉伸,得到线性拉伸图像,基于灰度增益因子,确定直方图组距;其中,直方图组距小于或等于灰度增益因子;基于该直方图组距,对线性拉伸图像进行双平台直方图均衡处理,得到目标图像。由于通过灰度增益因子,将待处理图像的灰度值动态范围线性拉伸,可以扩大最小灰度差,避免低频度灰度值在直方图统计中融入相邻灰度值,减少了目标图像中的细节损失。另外,可以基于灰度增益因子,确定直方图组距,由于线性拉伸图像的最小灰度差被拉大,因此,确定出的直方图组距也会增大,从而使得直方图组数减小,由此可以降低统计直方图精度时的硬件消耗,节省了硬件资源。
- 还没有人留言评论。精彩留言会获得点赞!