搬运装置、搬运机器人、仓储系统及取放货物的方法与流程
本技术涉及智能仓储物流领域,尤其涉及一种搬运装置、搬运机器人、仓储系统及取放货物的方法。
背景技术:
1、智能仓储是物流过程的一个重要环节。智能仓储的应用,保证了仓库管理各个环节数据输入的速度和准确性,确保企业及时准确地掌握库存的真实数据,合理保持和控制企业库存。
2、仓储系统可以包括搬运机器人和货架,搬运机器人可以包括立柱组件和位于立柱组件上的搬运装置,搬运装置可伸出立柱组件外,以在货架上取放货物。
3、但是,搬运装置在货架上的同一库位放置一个货物,货架的空间利用率较低。
技术实现思路
1、本技术提供一种搬运装置、搬运机器人、仓储系统及取放货物的方法,同一库位可以放置至少两个货物。
2、第一方面,本技术提供一种搬运装置,包括托盘、伸缩模组、拉杆模组、推板模组和推杆模组。其中,伸缩模组设置在托盘上,并可相对于托盘以伸出或缩回。拉杆模组设置在伸缩模组伸出方向的前端,可相对于伸缩模组旋转,用于在伸缩模组缩回时,将货物拉入托盘内。推板模组,设置在伸缩模组伸出方向的后端。推杆模组设置在伸缩模组上,位于拉杆模组和推板模组之间,并与拉杆模组和推板模组间隔。其中,推板模组用于在伸缩模组伸出时,将位于拉杆模组和推板模组之间的货物推出托盘。推杆模组可相对于伸缩模组在水平面内旋转,用于在伸缩模组伸出时,将位于拉杆模组和推杆模组之间的货物推出托盘。
3、在一种可能的实现方式中,本技术提供的搬运装置,推杆模组通过旋转在收回状态和展开状态之间切换。其中,收回状态时推杆模组与伸缩模组伸出方向平行,展开状态时推杆模组与伸缩模组伸出方向垂直。
4、在一种可能的实现方式中,本技术提供的搬运装置,推杆模组用于切换至展开状态,以使第一尺寸的货物位于推杆模组和拉杆模组之间。推杆模组还用于切换至收回状态,以使第二尺寸的货物位于拉杆模组和推板模组之间,其中第一尺寸的货物小于第二尺寸的货物。
5、在一种可能的实现方式中,本技术提供的搬运装置,还包括收容腔,收容腔位于伸缩模组上,或者伸缩模组和托盘共同形成收容腔。在收回状态时,推杆模组被收纳在收容腔内。
6、在一种可能的实现方式中,本技术提供的搬运装置,推杆模组包括推杆组件、传动组件和推杆驱动组件。推杆驱动组件通过传动组件与推杆组件连接,以通过传动组件驱动推杆组件旋转。伸缩模组连接在托盘的侧边,伸缩模组开设有出入口,出入口与收容腔连通。推杆模组设置在伸缩模组远离托盘的一侧,推杆组件对应出入口设置,以通过出入口旋转至托盘所在侧。
7、在一种可能的实现方式中,本技术提供的搬运装置,推杆驱动组件包括驱动件和支撑座。支撑座具有安装腔,驱动件设置在安装腔内,并且,驱动件的驱动轴伸至支撑座外以与传动组件连接。推杆组件包括推杆和推杆转轴,推杆转轴的一端穿设于支撑座,并伸出至支撑座外以与传动组件连接。推杆套设在位于支撑座外的推杆转轴的另一端。
8、在一种可能的实现方式中,本技术提供的搬运装置,推杆组件还包括至少一个轴承,轴承位于安装腔内,轴承的外圈与安装腔的内壁固接,推杆转轴插设在轴承的内圈。
9、在一种可能的实现方式中,本技术提供的搬运装置,支撑座上具有止挡部,推杆具有相对的第一侧面和第二侧面。在展开状态,第一侧面朝向止挡部且与止挡部抵接,推杆位于支撑座的一侧。在收回状态,推杆与止挡部相邻的端面与止挡部抵接。
10、在一种可能的实现方式中,本技术提供的搬运装置,支撑座的侧面具有定位件,伸缩模组上具有安装孔,定位件插设在安装孔内。
11、在一种可能的实现方式中,本技术提供的搬运装置,第一侧面具有至少一个减重槽。
12、在一种可能的实现方式中,本技术提供的搬运装置,推杆模组具有多个,多个推杆模组依次间隔设置在伸缩模组上,并位于拉杆模组和推板模组之间。
13、在一种可能的实现方式中,本技术提供的搬运装置,托盘包括托盘底板和两个侧板,两个侧板分别设置在托盘底板相对的两侧。托盘底板具有对称轴线,两个侧板沿对称轴线对称设置。伸缩模组的数量为两个,伸缩模组与侧板一一对应设置,伸缩模组与侧板朝向托盘底板的侧面连接。
14、在一种可能的实现方式中,本技术提供的搬运装置,拉杆模组和推杆模组的数量均为两个,拉杆模组与伸缩模组一一对应连接,推杆模组与伸缩模组一一对应连接。各拉杆模组和各推杆模组沿对称轴线对称设置。
15、在一种可能的实现方式中,本技术提供的搬运装置,伸缩模组包括伸缩驱动组件和伸缩臂,伸缩臂与托盘连接,出入口位于伸缩臂上,支撑座与伸缩臂连接,伸缩驱动组件与伸缩臂连接,以驱动伸缩臂伸出或缩回托盘。
16、在一种可能的实现方式中,本技术提供的搬运装置,拉杆模组包括拉杆驱动组件和拉杆,拉杆驱动组件设置在伸缩模组上,拉杆驱动组件与拉杆连接,以驱动拉杆相对于伸缩模组旋转。
17、在一种可能的实现方式中,本技术提供的搬运装置,拉杆模组的旋转平面为竖直面,且与伸缩模组的伸出方向垂直。
18、在一种可能的实现方式中,本技术提供的搬运装置,推板模组与推杆模组的结构相同。或者,推板模组包括两个推板,推板与伸缩模组一一对应连接。
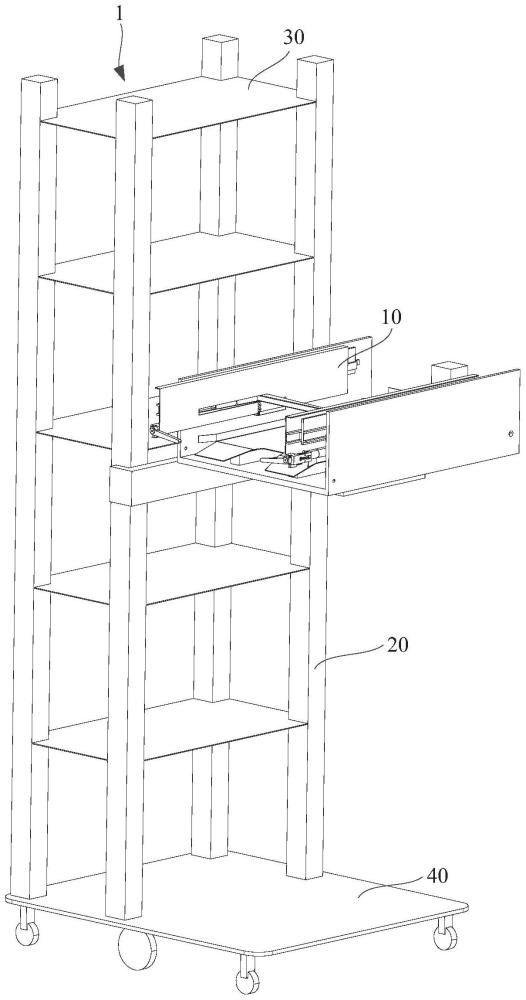
19、第二方面,本技术提供一种搬运机器人,包括立柱组件和上述第一方面的搬运装置。其中,搬运装置设置在立柱组件上,并可沿竖直方向相对于立柱组件升降
20、第三方面,本技术提供一种仓储系统,包括货架和上述第二方面的搬运机器人。其中,搬运机器人的搬运装置用于在货架上取放货物。
21、第四方面,本技术提供一种取放货物的方法,采用上述第二方面的搬运机器人,包括:
22、接收取货指令,其中,取货指令包括货物的尺寸。
23、响应于货物的尺寸小于或等于预设阈值,控制推杆模组在水平面内旋转至伸缩模组朝向托盘的一侧,并控制拉杆模组旋转至竖直状态。
24、控制伸缩模组相对于托盘伸出,以带动推杆模组和拉杆模组移动至货物位于推杆模组和拉杆模组之间。以及
25、控制拉杆模组旋转至水平状态,并控制伸缩模组相对于托盘缩回,以通过拉杆模组将货物由放货位上拉入托盘内。
26、在一种可能的实现方式中,本技术提供的取放货物的方法,包括:
27、响应于货物的尺寸大于预设阈值,控制推杆模组旋转至伸缩模组内,并控制拉杆模组旋转至竖直状态。
28、控制伸缩模组相对于托盘伸出,以带动推板模组和拉杆模组移动,至货物位于推板模组和拉杆模组之间。以及
29、控制拉杆模组旋转至水平状态,并控制伸缩模组相对于托盘缩回,以通过拉杆模组将货物由放货位上拉入托盘内。
30、在一种可能的实现方式中,本技术提供的取放货物的方法,还包括:
31、接收放货指令,放货指令包括货物的放货位置。
32、控制伸缩模组相对于托盘伸出,以通过推杆模组将拉杆模组与推杆模组之间的货物推至放货位上。或者
33、通过推板模组将推板模组与拉杆模组之间的货物推至放货位上。
34、本技术提供的搬运装置、搬运机器人、仓储系统及取放货物的方法,搬运装置通过设置推杆模组,推杆模组在水平面内旋转,以使推杆模组在收回状态和展开状态之间切换。推杆模组分别处于收回状态和展开状态时,搬运装置可容纳不同尺寸的货物。通过推杆模组在水平面内旋转,避免推杆模组影响搬运装置的高度方向的尺寸。通过推杆模组和推板模组分别限制了货物进入托盘的深度,以及货物进入货架或其他放置货物的部件同一库位的深浅度,由此,同一个库位能容纳不同尺寸的货物,并且可以容纳多个较小尺寸的货物。
- 还没有人留言评论。精彩留言会获得点赞!