一种智能装车系统的制作方法
本发明涉及储运,具体地涉及一种智能装车系统。
背景技术:
1、目前,储运沥青的车辆槽罐车充装,基本是以人工现场手动操作鹤管与车辆槽罐车灌装口连接,需要在装车现场配置大量人员。传统装车手段效率低,强度高,无法满足沥青大出厂量的需求以及环保、节约能源的要求。传统装车方式劣势主要体现在:
2、1)沥青出厂量大,造成劳动强度大,工作效率低;
3、2)车辆存在超载、满溢等安全风险;
4、3)装车设备自动化程度低,设备故障率较高,增加了检修频率;
5、4)传统装车存在油气外溢,无法满足环保和节约能源的要求。
技术实现思路
1、本发明实施例的目的是提供一种智能装车系统,该智能装车系统可以克服现有装车的上述劣势。
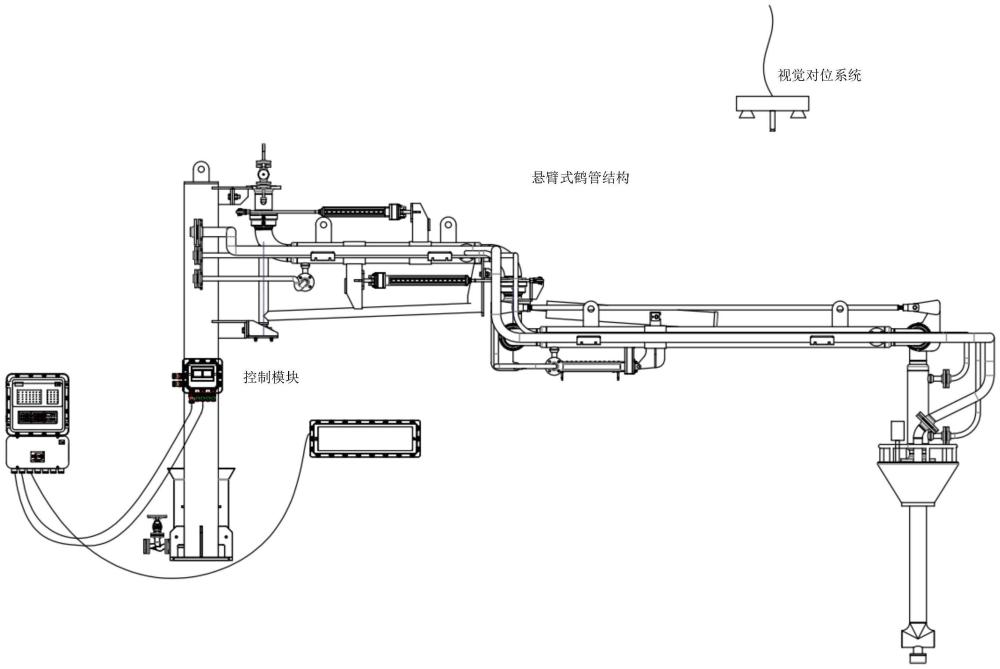
2、为了实现上述目的,本发明实施例提供一种智能装车系统,所述智能装车系统包括视觉对位系统、控制模块、以及设置在装车岛位预设位置的悬臂式鹤管结构,其中,所述悬臂式鹤管结构包括竖直放置的固定结构、装车鹤管、液压控制模块,所述装车鹤管的一端连接所述固定结构,所述液压控制模块和所述液位开关位于所述装车鹤管上,所述控制模块用于当车辆停在所述装车岛位上的泊车位置后,通过所述视觉对位系统获取所述车辆的罐口位置,控制所述液压控制模块驱动所述装车鹤管移动至所述车辆的罐口位置后,打开装车控制阀,并通过所述装车鹤管对所述车辆进行装车控制。
3、可选的,所述智能装车系统还包括泊车检测装置,所述泊车检测装置包括四个红外对射光栅,每个红外对射光栅各自位于所述装车岛位的四个角。所述控制模块还用于:通过所述四个红外对射光栅检测所述车辆在所述装车岛位的位置,以协助所述车辆准确停在所述装车岛位上的泊车位置。
4、可选的,所述通过所述视觉对位系统获取所述车辆的罐口位置包括:通过所述视觉对位系统获取当前图片,在所述当前图片中获取所述车辆的罐口图像;以所述视觉对位系统的视觉机械位置为原点,建立视觉坐标系;通过所述视觉坐标系和所述车辆的罐口图像,确定所述车辆的罐口位置。
5、可选的,所述装车鹤管的另一端设置有密封帽和液位开关,所述液位开关靠近所述密封帽设置,所述密封帽用于密封所述车辆的罐口,所述密封帽上设置有对位检测装置,用于检测所述密封帽是否密封所述车辆的罐口,所述对位检测装置包括激光距离传感器和压紧装置。所述控制模块还用于:当所述密封帽未密封所述车辆的罐口时,控制所述液压控制模块,来控制所述装车鹤管退回;重新通过所述视觉对位系统获取所述车辆的罐口位置,重新控制所述液压控制模块驱动所述装车鹤管移动至所述车辆的罐口位置,控制所述密封帽密封所述车辆的罐口。
6、可选的,所述智能装车系统还包括补光装置,与所述视觉对位系统适应性安装。
7、可选的,所述视觉对位系统还用于获取所述车辆的车牌信息,所述控制模块还用于根据所获取的车牌信息,确定所述车辆的参数信息,并根据所述参数信息控制装车,其中,所述参数信息包括业务单据编号、预发物料总量、物料标号、承载量中的一者或多者。
8、可选的,在所述根据所述参数信息控制装车之前,所述控制模块还用于:确定装车的控制阶段,所述装车的控制阶段包括开始阶段、恒流发油阶段和结束阶段;确定各控制阶段对应的控制时间和控制流量,以根据所述控制时间和所述控制流量控制所述装车控制阀的开度,来控制装车。
9、可选的,所述确定各控制阶段对应的控制时间和控制流量,以根据所述控制时间和所述控制流量控制所述装车控制阀的开度,来控制装车,包括:所述开始阶段包括启动时段、开启稳流时段、开启上升时段,在所述启动时段,根据第一控制时间和第一控制流量控制所述装车控制阀以第一预设速率从闭合逐渐打开,使所述第一控制流量达预设的开启流量稳流值,在所述开启稳流时段,根据预设的开启稳流允许偏离值、第二控制时间和第二控制流量,调整所述装车控制阀的开度,在所述开启上升时段,根据第三控制时间和第三控制流量控制所述装车控制阀以第二预设速率继续打开,使所述第三控制流量从所述预设的开启流量稳流值上升至预设的恒流流量值;在所述恒流发油阶段,根据预设的恒流允许偏离值、第四控制时间和第四控制流量,调整所述装车控制阀的开度,使所述第四控制流量达到预设的结束提前量;所述结束阶段包括关闭下降时段、关闭稳流时段和结束时段,在所述关闭下降时段,根据第五控制时间和第五控制流量控制所述装车控制阀以第三预设速率逐渐关闭,使所述第五控制流量从所述预设的结束提前量达到预设的关闭流量稳流值,在所述关闭稳流时段,根据预设的关闭稳流允许偏离值、第六控制时间和第六控制流量,调整所述装车控制阀的开度,在所述结束时段,根据第七控制时间和第七控制流量控制所述装车控制阀以第四预设速率继续关闭,直至完全关闭。
10、可选的,所述控制模块还用于:在装车过程中,监控装车故障;以及在发生装车故障时,发出故障警报信息。
11、可选的,所述智能装车系统还包括防爆液位传感器,所述监控装车故障包括:通过所述防爆液位传感器检测罐口的液位信息;以及当所述液位信息达到预设的安全位置信息时,确定装车过程发生溢流故障。
12、可选的,所述智能装车系统还包括静电接地夹,所述监控装车故障包括:通过所述静电接地夹检测所述车辆的接地情况;当所述车辆与接地桩之间的电阻值超过预设的安全电阻值时,确定所述车辆发生静电故障。
13、可选的,所述智能装车系统还包括显示模块,用于显示所述车辆的停靠信息、所述车辆的参数信息、装车工艺选择信息、装车控制的启动和停止信息、装车的计流量及流速控制信息、故障及警报信息、所述液位开关的开度信息中的一者或多者。
14、通过上述技术方案,本发明实施例通过软硬件配合,完成整个自动装车包括自动对位、定量装车、油气回收、鹤管收回、车辆驶离等,最后生产样品进行现场试用。
15、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种智能装车系统,其特征在于,所述智能装车系统包括视觉对位系统、控制模块、以及设置在装车岛位预设位置的悬臂式鹤管结构,
2.根据权利要求1所述的智能装车系统,其特征在于,所述智能装车系统还包括泊车检测装置,所述泊车检测装置包括四个红外对射光栅,每个红外对射光栅各自位于所述装车岛位的四个角,
3.根据权利要求1所述的智能装车系统,其特征在于,所述通过所述视觉对位系统获取所述车辆的罐口位置包括:
4.根据权利要求1所述的智能装车系统,其特征在于,所述装车鹤管的另一端设置有密封帽和液位开关,所述液位开关靠近所述密封帽设置,所述密封帽用于密封所述车辆的罐口,
5.根据权利要求1或3所述的智能装车系统,其特征在于,所述智能装车系统还包括补光装置,与所述视觉对位系统适应性安装。
6.根据权利要求1所述的智能装车系统,其特征在于,所述视觉对位系统还用于获取所述车辆的车牌信息,
7.根据权利要求6所述的智能装车系统,其特征在于,在所述根据所述参数信息控制装车之前,所述控制模块还用于:
8.根据权利要求7所述的智能装车系统,其特征在于,所述确定各控制阶段对应的控制时间和控制流量,以根据所述控制时间和所述控制流量控制所述装车控制阀的开度,来控制装车,包括:
9.根据权利要求1所述的智能装车系统,其特征在于,所述控制模块还用于:
10.根据权利要求9所述的智能装车系统,其特征在于,所述智能装车系统还包括防爆液位传感器,所述监控装车故障包括:
11.根据权利要求9所述的智能装车系统,其特征在于,所述智能装车系统还包括静电接地夹,所述监控装车故障包括:
12.根据权利要求1所述的智能装车系统,其特征在于,所述智能装车系统还包括显示模块,用于显示所述车辆的停靠信息、所述车辆的参数信息、装车工艺选择信息、装车控制的启动和停止信息、装车的计流量及流速控制信息、故障及警报信息、所述液位开关的开度信息中的一者或多者。
技术总结
本发明实施例提供一种智能装车系统,属于储运技术领域。所述智能装车系统包括视觉对位系统、控制模块、以及设置在装车岛位预设位置的悬臂式鹤管结构,其中,所述悬臂式鹤管结构包括竖直放置的固定结构、装车鹤管、液压控制模块,所述装车鹤管的一端连接所述固定结构,所述液压控制模块和所述液位开关位于所述装车鹤管上,所述控制模块用于当车辆停在所述装车岛位上的泊车位置后,通过所述视觉对位系统获取所述车辆的罐口位置,控制所述液压控制模块驱动所述装车鹤管移动至所述车辆的罐口位置后,打开装车控制阀,并通过所述装车鹤管对所述车辆进行装车控制。完成整个自动装车包括自动对位、定量装车、油气回收、鹤管收回、车辆驶离等。
技术研发人员:汤衢明,师彦俊,林伟,方流祥,陈上访,张洲波,丁旭,王波,毛继瑶,武光弘
受保护的技术使用者:中国石油化工股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!