一种托辊拆码垛打捆输送机器人工作站的制作方法
本发明涉及托辊打包领域,特别是涉及一种托辊拆码垛打捆输送机器人工作站。
背景技术:
1、现有的用于托辊打包的工作站能够实现来料视觉扫描定位、托辊自动抓取码垛装箱、装满后自动输送出码垛装箱工作站。该工作站包括搬运机器人、3d视觉系统、机器人端拾器、辊道输送线等部分。系统采用工业机器人配合3d视觉系统完成工件的精准定位,引导机器人自动抓取,可适应不同直径、不同长短托辊的自动化码垛装箱。然而,该工作站无法实现流水线式作业,导致工作效率低。
技术实现思路
1、为解决以上技术问题,本发明提供一种托辊拆码垛打捆输送机器人工作站,使得拆码垛及自动打捆形成流水线式作业,提高了工作效率。
2、为实现上述目的,本发明提供了如下方案:
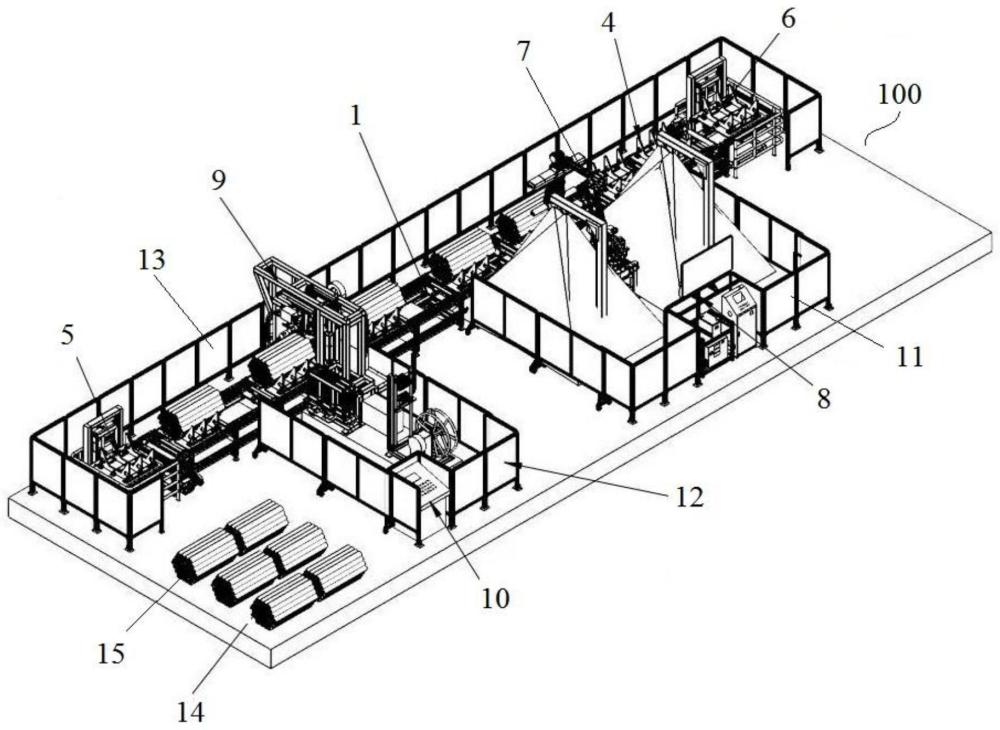
3、本发明提供一种托辊拆码垛打捆输送机器人工作站,包括拆码垛系统、打捆系统、双层倍速链输送系统和搬运部件,所述拆码垛系统和所述打捆系统依次设置于所述双层倍速链输送系统的一侧,所述双层倍速链输送系统包括双层倍速链、第一输送线升降机和第二输送线升降机,所述第一输送线升降机和所述第二输送线升降机分别设置于所述双层倍速链的两端,所述双层倍速链包括上层倍速链、下层倍速链、多个倍速板和多个托辊整形工装,所述上层倍速链和所述下层倍速链的运输方向相反,所述上层倍速链和所述下层倍速链上均设置有多个所述倍速板,所述托辊整形工装用于安装于所述倍速板上,所述拆码垛系统用于将多个托辊码垛于一个所述托辊整形工装中,所述打捆系统用于对一个所述托辊整形工装中的多个所述托辊进行打捆以形成托辊打包成品,所述搬运部件用于将所述托辊打包成品由所述托辊整形工装中取出并进行搬运。
4、优选地,还包括总控系统,所述拆码垛系统、打捆系统和双层倍速链输送系统均与所述总控系统连接。
5、优选地,所述拆码垛系统包括拆码垛机器人和用于控制拆码垛机器人的拆码垛控制系统,所述拆码垛控制系统与所述总控系统连接。
6、优选地,所述拆码垛系统还包括第一安全围栏,所述第一安全围栏靠近所述双层倍速链的一侧为敞口结构,所述拆码垛机器人位于所述第一安全围栏中,所述拆码垛控制系统位于所述第一安全围栏的外部。
7、优选地,所述打捆系统包括打捆机和用于控制所述打捆机的打捆控制系统,所述打捆控制系统与所述总控系统连接。
8、优选地,所述打捆系统还包括第二安全围栏,所述第二安全围栏靠近所述双层倍速链的一侧为敞口结构,所述打捆机位于所述第二安全围栏中,所述打捆控制系统位于所述第二安全围栏的外部。
9、优选地,所述双层倍速链输送系统还包括物流输送控制系统,所述上层倍速链、所述下层倍速链、所述第一输送线升降机和所述第二输送线升降机均与所述物流输送控制系统连接,所述物流输送控制系统与所述总控系统连接。
10、优选地,所述双层倍速链输送系统还包括第三安全围栏,所述第三安全围栏靠近所述拆码垛系统和所述打捆系统的一侧为敞口结构,所述上层倍速链、所述下层倍速链、所述第一输送线升降机和所述第二输送线升降机均设置于所述第三安全围栏中。
11、优选地,所述托辊整形工装包括多个底部支撑杆和多个整形板,多个所述底部支撑杆依次设置且相互平行,各所述整形板均与多个所述底部支撑杆连接,多个所述整形板依次设置且相互平行,所述整形板上部设置有用于容纳所述托辊的整形开口,所述底部支撑杆能够通过定位销安装于所述倍速板上。
12、优选地,所述搬运部件为叉车。
13、本发明相对于现有技术取得了以下技术效果:
14、本发明的托辊拆码垛打捆输送机器人工作站包括拆码垛系统、打捆系统、双层倍速链输送系统和搬运部件,拆码垛系统和打捆系统依次设置于双层倍速链输送系统的一侧。工作时,拆码垛系统将多个托辊码垛于一个托辊整形工装中,打捆系统对一个托辊整形工装中的多个托辊进行打捆以形成托辊打包成品,搬运部件将托辊打包成品由托辊整形工装中取出并进行搬运,双层倍速链分为上下两层,自身形成回流,使得托辊整形工装自动回流,使得拆码垛及自动打捆形成流水线式作业,提高了工作效率。
技术特征:
1.一种托辊拆码垛打捆输送机器人工作站,其特征在于,包括拆码垛系统、打捆系统、双层倍速链输送系统和搬运部件,所述拆码垛系统和所述打捆系统依次设置于所述双层倍速链输送系统的一侧,所述双层倍速链输送系统包括双层倍速链、第一输送线升降机和第二输送线升降机,所述第一输送线升降机和所述第二输送线升降机分别设置于所述双层倍速链的两端,所述双层倍速链包括上层倍速链、下层倍速链、多个倍速板和多个托辊整形工装,所述上层倍速链和所述下层倍速链的运输方向相反,所述上层倍速链和所述下层倍速链上均设置有多个所述倍速板,所述托辊整形工装用于安装于所述倍速板上,所述拆码垛系统用于将多个托辊码垛于一个所述托辊整形工装中,所述打捆系统用于对一个所述托辊整形工装中的多个所述托辊进行打捆以形成托辊打包成品,所述搬运部件用于将所述托辊打包成品由所述托辊整形工装中取出并进行搬运。
2.根据权利要求1所述的托辊拆码垛打捆输送机器人工作站,其特征在于,还包括总控系统,所述拆码垛系统、打捆系统和双层倍速链输送系统均与所述总控系统连接。
3.根据权利要求2所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述拆码垛系统包括拆码垛机器人和用于控制拆码垛机器人的拆码垛控制系统,所述拆码垛控制系统与所述总控系统连接。
4.根据权利要求3所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述拆码垛系统还包括第一安全围栏,所述第一安全围栏靠近所述双层倍速链的一侧为敞口结构,所述拆码垛机器人位于所述第一安全围栏中,所述拆码垛控制系统位于所述第一安全围栏的外部。
5.根据权利要求2所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述打捆系统包括打捆机和用于控制所述打捆机的打捆控制系统,所述打捆控制系统与所述总控系统连接。
6.根据权利要求5所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述打捆系统还包括第二安全围栏,所述第二安全围栏靠近所述双层倍速链的一侧为敞口结构,所述打捆机位于所述第二安全围栏中,所述打捆控制系统位于所述第二安全围栏的外部。
7.根据权利要求2所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述双层倍速链输送系统还包括物流输送控制系统,所述上层倍速链、所述下层倍速链、所述第一输送线升降机和所述第二输送线升降机均与所述物流输送控制系统连接,所述物流输送控制系统与所述总控系统连接。
8.根据权利要求1所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述双层倍速链输送系统还包括第三安全围栏,所述第三安全围栏靠近所述拆码垛系统和所述打捆系统的一侧为敞口结构,所述上层倍速链、所述下层倍速链、所述第一输送线升降机和所述第二输送线升降机均设置于所述第三安全围栏中。
9.根据权利要求1所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述托辊整形工装包括多个底部支撑杆和多个整形板,多个所述底部支撑杆依次设置且相互平行,各所述整形板均与多个所述底部支撑杆连接,多个所述整形板依次设置且相互平行,所述整形板上部设置有用于容纳所述托辊的整形开口,所述底部支撑杆能够通过定位销安装于所述倍速板上。
10.根据权利要求1所述的托辊拆码垛打捆输送机器人工作站,其特征在于,所述搬运部件为叉车。
技术总结
本发明公开一种托辊拆码垛打捆输送机器人工作站,涉及托辊打包领域,包括拆码垛系统、打捆系统、双层倍速链输送系统和搬运部件,拆码垛系统和打捆系统依次设置于双层倍速链输送系统的一侧,双层倍速链输送系统包括双层倍速链、第一输送线升降机和第二输送线升降机,第一输送线升降机和第二输送线升降机分别设置于双层倍速链的两端,双层倍速链包括上层倍速链、下层倍速链、多个倍速板和多个托辊整形工装,上层倍速链和下层倍速链的运输方向相反,上层倍速链和下层倍速链上均设置有多个倍速板,托辊整形工装用于安装于倍速板上。该托辊拆码垛打捆输送机器人工作站使得拆码垛及自动打捆形成流水线式作业,提高了工作效率。
技术研发人员:张爱杰,张斌,张震
受保护的技术使用者:北京中兴国华电力设备有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!