一种通用的起重机控制联动互锁装置及控制方法与流程
1.本发明涉及一种通用的起重机控制联动互锁装置及控制方法,属于通用起重机电气控制技术领域。
背景技术:
2.起重机又称吊车,是一定空间内多方向搬运重物的多动作起重机械。起重机因作业稳定、起重量大、可在特定空间范围内吊重物行走等优势,在生产型企业的应用占比越来越大。起重设备在工作过程中,通常是取料、运移、卸载交替进行工作的,在进行这些常规的间歇性操作过程中,为保证作业安全,通常要求起重机执行单一动作。而现实工作中,操作人员出于操作习惯或者提升效率考虑,经常大车、小车通车操作,或者大车、小车,起升同时控制,这就很大程度的增加了安全风险,类似的操作导致的安全事故也不在少数。随着现代工业的发展,安全管理显得特别重要。目前,起重机的控制装置通常将遥控装置上的动作按钮与起重机的控制器直接连接,同时按下多个动作按键,起重机即可同时执行多个动作,导致不能有效控制起重机的规范操作。基于安全管理提升,急需本质化安全改善,从技术手段出发,彻底避免联动操作的可能性,提升作业现场起重机操作安全管控水平。
技术实现要素:
3.为了克服现有技术中存在的问题,本发明提供一种通用的起重机控制联动互锁装置及控制方法,该装置通用性强,安装、接线方便,串联接入操作控制线路,有效实现行车操作联动互锁,做到本质化安全改善,降低作业安全风险,可普遍应用于现有起重机的操作控制。
4.本发明采用的技术方案是:一种通用的起重机控制联动互锁装置包括手持遥控器和控制互锁装置,手持遥控器通过控制互锁装置通信连接起重机,所述控制互锁装置包含信号接收模块、控制模块和动作控制器,控制模块包含输入端子排、控制器件组和输出端子排,输入端子排通过信号接收模块通信连接手持遥控器,输出端子排通过动作控制器通信连接起重机;所述的控制器件组包含六个继电器,输入端子排包含六个输入端子,输出端子排包含六个输出端子和一个公共端子,输入端子排上的每个输入端子依次串联四个继电器的一个常闭触点后一个支路依次连接剩余的一个继电器的公共端、输入端子排的公共端子,另一个支路连接输出端子排上对应动作的输出端;控制一个动作的继电器不接入控制相反动作的控制线路。
5.所述继电器采用四开闭式继电器。
6.所述的一种通用的起重机控制联动互锁装置的控制方法,包含以下步骤:a)信号接收模块接受到指令动作后将信号传输至输入端子组对应的输入端子;b)对应的输入端子通过串联的四个继电器接通控制所述指令动作的继电器和对应该动作的输出端子组成闭合回路;
c)输出端子受电后,将动作指令传输至动作控制器,控制器控制起重机执行所述指令动作。
7.输入端子接收到动作命令后,与其连接四个继电器受电动作,从常闭触点转换至常开触点,从而将控制该指令动作的继电器以及输出端子排上的指令动作输出端子、公共端子接入电路,对应动作的输出端子受电后将动作指令信号传输至动作控制器,从而控制器起重机执行该指令动作。接入常闭触点的继电器动作后,信号传输至动作控制器,同时继电器动作,四组常闭触点转换为常开触点,所连接的其他动作输出回路处于断开状态,直至该动作结束。起重机只接收到一个指令动作,只能执行该动作。因此通过这种控制方法能够有效防止起重机同时执行两个动作。以此类推,无论先运行哪个机构,在此机构没有停止之前,其余机构均无法动作,从而实现控制互锁。
8.本发明的有益效果:这种通用的起重机控制联动互锁装置包括手持遥控器和控制互锁装置,手持遥控器通过控制互锁装置通信连接起重机,所述控制互锁装置包含信号接收模块、控制模块和动作控制器,控制模块包含输入端子排、控制器件组和输出端子排,输入端子排通过信号接收模块通信连接手持遥控器,输出端子排通过动作控制器通信连接起重机。该装置通过在信号接受模块和动作控制器之间接入控制模块,实现起重机各个指令动作之间形成互锁功能,起重机通过控制装置只能接收到单一指令动作,从而实现有效控制安全操作起重机的目的,另外该装置结构简单、操作方便,通过输入端子排、输出端子排和一个继电器组即有效实现行车操作联动互锁。
附图说明
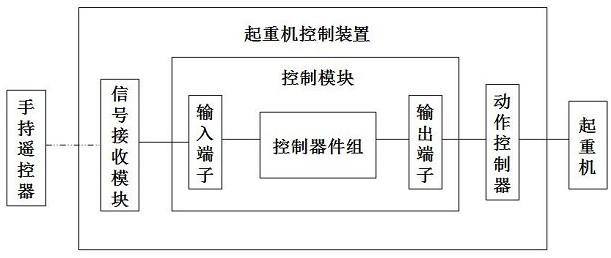
9.图1是一种通用的起重机控制联动互锁装置的结构示意图。
10.图2是图1中互锁控制模块的电路连接图。
11.其中,cr1、上升抑制继电器,cr2、下降抑制继电器,cr3、东行抑制继电器,cr4、西行抑制继电器,cr5、南行抑制继电器,cr1、北行抑制继电器,s1、输入端子组,s2、输出端子组。
具体实施方式
12.以下结合附图对本发明进行完整详细描述。
13.图1示出了一种通用的起重机控制联动互锁装置的结构示意图,图中,这种通用的起重机控制联动互锁装置包括手持遥控器和控制互锁装置,手持遥控器通过控制互锁装置通信连接起重机,控制互锁装置包含信号接收模块、控制模块和动作控制器,控制模块包含输入端子排、控制器件组和输出端子排,输入端子排通过信号接收模块通信连接手持遥控器,输出端子排通过动作控制器通信连接起重机。控制器件组包含上升抑制继电器cr1、下降抑制继电器cr2、东行抑制继电器cr3、西行抑制继电器cr4、南行抑制继电器cr5和北行抑制继电器cr6,输入端子排s1包含向上、向下、向东、向西、向南和向北(上、下、东、西、北、南)六个输入端子,输出端子排s2对应的包含向上、向下、向东、向西、向南、向北(n、s、w、e、d、u)六个输出端子和一个公共端子(com)。输入端子u接收上升信号,输入端子d接收下降信号,输入端子w接收西行信号,输入端子e接收东行信号,输入端子n接收北行信号,输入端子s接收南行信号。输出端子组s2上的公共端子连接六个继电器的公共端,输出端子n输出北行信
号,输出端子s输出南行信号,输出端子w输出西行信号,输出端子e输出东行信号,输出端子d输出下行信号,输出端子u输出上行信号。
14.输入端子排s1上的输入端子(上)依次串联南行抑制继电器cr5、北行抑制继电器cr6、西行抑制继电器cr4、东行抑制继电器cr3上的一组常闭触点,后一个支路连接上升抑制继电器cr1的公共端、输出端子排s2上的公共端子(com),另一个支路连接输出端子排s2上的向上输出端子u。输入端子(下)依次串联南行抑制继电器cr5、北行抑制继电器cr6、西行抑制继电器cr4、东行抑制继电器cr3上的另一组常闭触点后一个支路连接下降抑制继电器cr2的公共端、输出端子排s2上的公共端子(com),另一个支路连接输出端子排s2上的向下输出端子d。控制向上、向下动作的继电器(cr1、cr2)不接入彼此的控制线路中。
15.同样的,输入端子w依次串联北行抑制继电器cr6、南行抑制继电器cr5、上升抑制继电器cr1、下降抑制继电器cr2上的一个常闭触点,后一个支路连接西行抑制继电器cr4的公共端、公共端子(com),另一个支路连接输出端子排s2上的向西输出端子w。输入端子(东)依次串联北行抑制继电器cr6、南行抑制继电器cr5、上升抑制继电器cr1、下降抑制继电器cr2上的另一个常闭触点,后一个支路连接东行抑制继电器cr3的公共端、公共端子(com),另一个支路连接输出端子排s2上的向东输出端子e。控制向西、向东动作的继电器(cr3、cr4)不接入彼此的控制线路中。
16.同理,控制向南和向北的输入端子(北)和输入端子(南)串联cr1、cr2、cr3、cr4的一组常闭触点后分别接入南行抑制继电器cr5、北行抑制继电器cr6控制的线路(如图2所示)。
17.继电器采用四开闭式继电器,同一个继电器上的一个触点开关仅接入一个线路。
18.以控制起重机上升动作为例,说明这种通用的起重机控制联动互锁装置的工作方法,具体步骤如下:a)在手持遥控器按下向上动作按钮,将信号传输至信号接收模块;b)信号接收模块将向上动作指令传递给输入端子组s1,输入端子(上)接收到上升信号后,连通东行抑制继电器cr3、西行抑制继电器cr4、南行抑制继电器cr5、北行抑制继电器cr6,四个继电器的开关从常闭触点转换至常开触点,最终连通上升抑制继电器cr1的控制线路,将动作指令传输到端子输出端子排s2上的向上输出端子u;c)向上输出端子u受电后,将控制信号传输至动作控制器;d)动作控制器接收到上升指令后,控制起重机向上提升物体(未触碰限位装置的前提下)。
19.上升抑制继电器cr1受电后,其线圈吸合,原本常闭的点会断开;每个机构电信号都会通过其他两个机构的常闭点,所以输入端子s1(w、e、n、s)接收到相应信号后会被阻挡,起重机无法接收到相应指令,不会做出相应动作,此时起重机只有一个上升动作。
20.以此类推,无论先运行上、下、东、西、南、北哪个机构,在此机构没有停止之前,其余机构均无法动作,从而实现控制互锁。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1