智能化转运移动机器人的制作方法
本发明涉及纺织机器人,尤其涉及智能化转运移动机器人。
背景技术:
1、目前,近五年来,纺织行业在创新驱动国家战略的框架下,分阶段确立战略目标和发展路径,在纤维材料、纺织、染整、产业用纺织品、纺织装备、信息化各领域取得了一系列创新成果,实现了全行业关键、共性技术的突破,行业自主创新能力、技术装备水平和产品开发能力整体提升。目前,纺织行业中物品的转移大多还处于人力搬运的阶段,采用人力搬运的方式已经无法满足纺织行业中对自动化的要求。
2、尤其,随着无人化工业需求的不断扩大,机器代替人力劳动的成为工业发展的一大趋势,在不断提高生产效率的同时,减少工人的体力劳动强度,同时使生产更加智能化。
技术实现思路
1、本发明的目的在于提供智能化转运移动机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
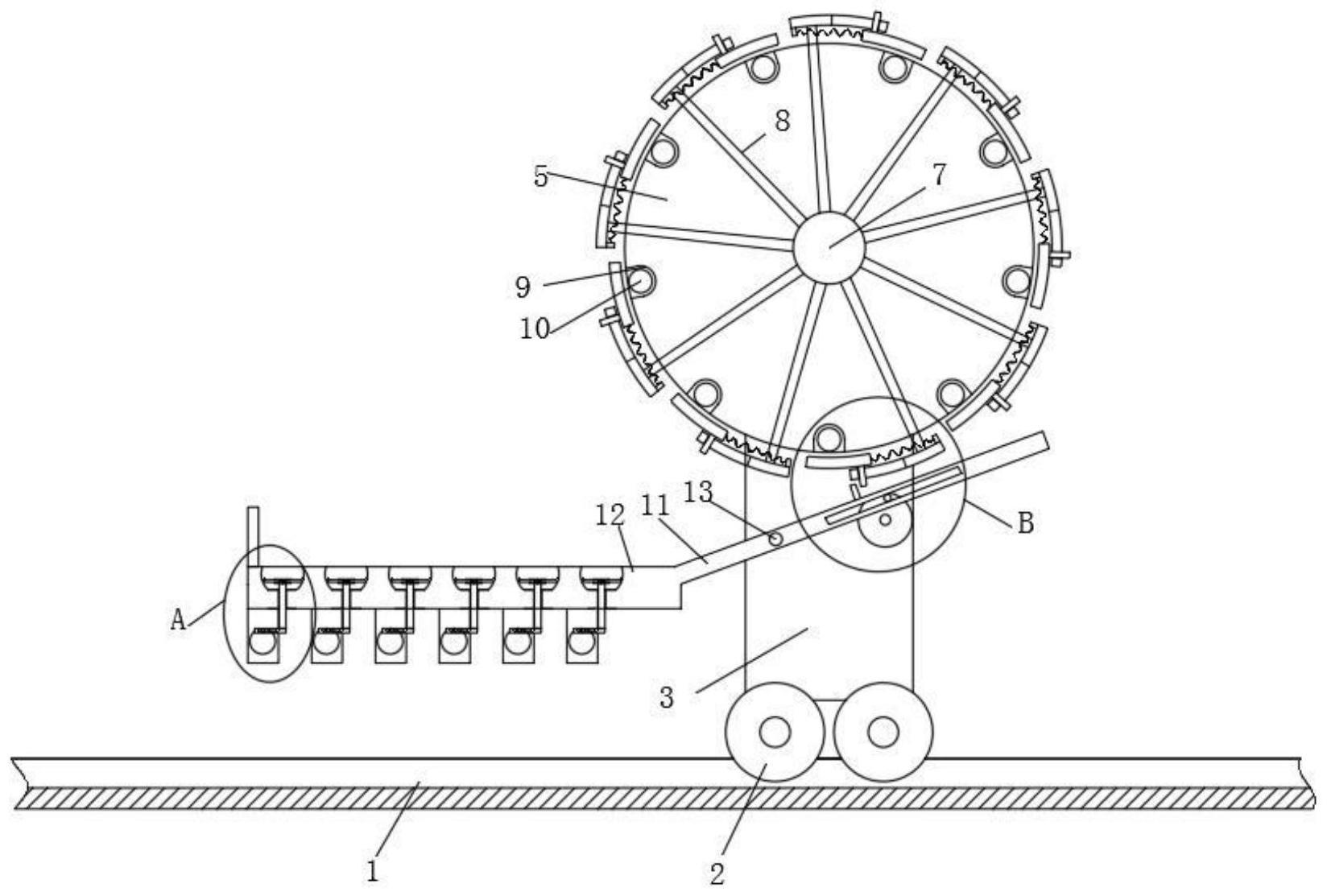
3、智能化转运移动机器人,包括安装在车间内的两个平行设置的地轨以及沿着所述地轨移动的转运机构,所述转运机构包括两个支撑架,两个支撑架的底部均安装移动轮,两个支撑架分别通过所述移动轮和两个地轨连接。
4、两个所述支撑架相远离的一侧均固定有第一电机,所述第一电机的输出轴穿过对应的支撑架、并驱动联接有转盘,且所述转盘远离支撑架的一侧中心处固定有第二电机,第二电机的输出轴驱动联接有中心板。
5、所述转盘的边缘处周向开设若干个卡槽,且两个转盘的对应位置的卡槽内安装同一根卷辊,且每个卡槽的槽口外侧均安装有封堵机构,所述封堵机构包括外挡板以及和所述外挡板相对滑动连接的内挡板,内挡板和外挡板之间通过弹性回复机构连接,且外挡板和所述中心板之间通过连杆固定。
6、作为上述方案的进一步的改进,所述内挡板的内圈与转盘的外环面之间留有间隙,间隙小于1mm。
7、作为上述方案的进一步的改进,所述弹性回复机构包括开设在外挡板上的导向孔以及滑动连接所述导向孔内的凸块一,凸块一和一端和内挡板固定,内挡板和外挡板之间通过柱状弹簧连接。
8、作为上述方案的进一步的改进,两个支撑架之间转动设置有承接机构,所述承接机构包括一转动连接于两个支撑架的旋转板,所述旋转板的中部两侧分别通过销轴和两个支撑架转动连接,且旋转板位于转盘的下方,旋转板靠近转盘的一侧具有凸起二,各个内挡板上的凸块一末端能够抵触凸起二,且支撑架上设置驱动旋转板转动的驱动单元,且旋转板的一侧还固定有落料储存板,所述落料储存板远离旋转板的一端顶面固定有挡板。
9、作为上述方案的进一步的改进,当转盘转动,各个内挡板上的凸块一末端能够抵触凸起二时,落料储存板处于水平位置,且落料储存板与旋转板的最低端固定。
10、作为上述方案的进一步的改进,所述驱动单元包括驱动盘以及连接柱,所述支撑架上安装驱使驱动盘转动的调节电机,驱动盘的盘面上偏心固定有连接柱,旋转板上沿长度方向开设条形孔,连接柱的末端活动穿过条形孔。
11、作为上述方案的进一步的改进,所述落料储存板上沿其阵列开设若干个沿其宽度方向设置的凹槽,且各个凹槽内均设置有支撑机构,落料储存板上还安装有控制器,控制器与各个支撑机构电性连接。
12、作为上述方案的进一步的改进,所述支撑机构包括位于凹槽内的升降支撑单元以及驱动所述升降支撑单元活动的动力单元,所述升降支撑单元包括一固定板和两个伸缩板,所述固定板的相对两侧对称开设有插槽,两个伸缩板分别滑动插设在两个插槽内、并与插槽内底面通过弹性件连接,且两个伸缩板的末端分别抵触于凹槽的内壁。
13、作为上述方案的进一步的改进,所述动力单元包括连杆、安装板以及调节盘,其中,安装板固定于落料储存板,落料储存板上安装动力电机,动力电机的输出轴驱动联接有调节盘,调节盘的盘面上偏心固定有拨动柱,连杆滑动贯穿落料储存板、并与对应的凹槽连通,连杆的内端和固定板的底端固定,连杆的外端垂直固定有活动杆,活动杆上沿长度方向开设调节孔,拨动柱活动穿过调节孔。
14、本发明的有益效果是:
15、本发明通过在转盘外侧各个卡槽内安装好卷辊后,使得支撑架通过移动轮沿着地轨移动到车间内的卸料工位,而当支撑架带动转盘移动到指定位置后,驱动盘转动,带动旋转板发生转动,使得旋转板上的凸起二逐渐靠近转盘,能够使得内挡板外侧的凸块一抵触于凸起二,每当转盘转动过两个相邻卡槽之间的夹角时,正好驱动盘转动一周,使得凸起二现在凸块一,带动对应的内挡板沿着导向孔滑动,使得对应卡槽内的卷辊掉落,并滚动至落料储存板上,如此往复转盘转动一周,即可完成所有卡槽内卷辊的卸料,自动化卸料,提高工作效率。
16、本发明当落料储存板接收卷辊时,通过控制不同凹槽内的支撑机构工作,能够有序的使得各个卷辊分别落入到对应的凹槽内进行储存,从而方便自动化卸料,节约人力物力。
技术特征:
1.智能化转运移动机器人,包括安装在车间内的两个平行设置的地轨(1)以及沿着所述地轨(1)移动的转运机构,所述转运机构包括两个支撑架(3),两个支撑架(3)的底部均安装移动轮(2),两个支撑架(3)分别通过所述移动轮(2)和两个地轨(1)连接;
2.根据权利要求1所述的智能化转运移动机器人,其特征在于:所述内挡板(15)的内圈与转盘(5)的外环面之间留有间隙,间隙小于1mm。
3.根据权利要求1所述的智能化转运移动机器人,其特征在于:所述弹性回复机构包括开设在外挡板(14)上的导向孔(21)以及滑动连接所述导向孔(21)内的凸块一(16),凸块一(16)和一端和内挡板(15)固定,内挡板(15)和外挡板(14)之间通过柱状弹簧连接。
4.根据权利要求1所述的智能化转运移动机器人,其特征在于:两个支撑架(3)之间转动设置有承接机构,所述承接机构包括一转动连接于两个支撑架(3)的旋转板(11),所述旋转板(11)的中部两侧分别通过销轴(13)和两个支撑架(3)转动连接,且旋转板(11)位于转盘(5)的下方,旋转板(11)靠近转盘(5)的一侧具有凸起二(17),各个内挡板(15)上的凸块一(16)末端能够抵触凸起二(17),且支撑架(3)上设置驱动旋转板(11)转动的驱动单元,且旋转板(11)的一侧还固定有落料储存板(12),所述落料储存板(12)远离旋转板(11)的一端顶面固定有挡板。
5.根据权利要求4所述的智能化转运移动机器人,其特征在于:当转盘(5)转动,各个内挡板(15)上的凸块一(16)末端能够抵触凸起二(17)时,落料储存板(12)处于水平位置,且落料储存板(12)与旋转板(11)的最低端固定。
6.根据权利要求5所述的智能化转运移动机器人,其特征在于:所述驱动单元包括驱动盘(19)以及连接柱(20),所述支撑架(3)上安装驱使驱动盘(19)转动的调节电机,驱动盘(19)的盘面上偏心固定有连接柱(20),旋转板(11)上沿长度方向开设条形孔(18),连接柱(20)的末端活动穿过条形孔(18)。
7.根据权利要求1所述的智能化转运移动机器人,其特征在于:所述落料储存板(12)上沿其阵列开设若干个沿其宽度方向设置的凹槽(31),且各个凹槽(31)内均设置有支撑机构,落料储存板(12)上还安装有控制器,控制器与各个支撑机构电性连接。
8.根据权利要求7所述的智能化转运移动机器人,其特征在于:所述支撑机构包括位于凹槽(31)内的升降支撑单元以及驱动所述升降支撑单元活动的动力单元,所述升降支撑单元包括一固定板(29)和两个伸缩板(28),所述固定板(29)的相对两侧对称开设有插槽(30),两个伸缩板(28)分别滑动插设在两个插槽内、并与插槽(30)内底面通过弹性件(27)连接,且两个伸缩板(28)的末端分别抵触于凹槽(31)的内壁。
9.根据权利要求8所述的智能化转运移动机器人,其特征在于:所述动力单元包括连杆(25)、安装板(32)以及调节盘(22),其中,安装板(32)固定于落料储存板(12),落料储存板(12)上安装动力电机,动力电机的输出轴驱动联接有调节盘(22),调节盘(22)的盘面上偏心固定有拨动柱(23),连杆(25)滑动贯穿落料储存板(12)、并与对应的凹槽(31)连通,连杆(25)的内端和固定板(29)的底端固定,连杆(25)的外端垂直固定有活动杆(24),活动杆(24)上沿长度方向开设调节孔,拨动柱(23)活动穿过调节孔。
技术总结
本发明涉及纺织机器人技术领域,公开了智能化转运移动机器人,包括安装在车间内的两个平行设置的地轨以及沿着所述地轨移动的转运机构,所述转运机构包括两个支撑架,两个支撑架的底部均安装移动轮,两个支撑架分别通过所述移动轮和两个地轨连接,两个所述支撑架相远离的一侧均固定有第一电机,所述第一电机的输出轴穿过对应的支撑架、并驱动联接有转盘,且所述转盘远离支撑架的一侧中心处固定有第二电机,第二电机的输出轴驱动联接有中心板,所述转盘的边缘处周向开设若干个卡槽。本发明能够快速上料,方便转运多个布料卷辊,并且能够自动化卸料,操作方便。
技术研发人员:张莉,赵配娟,占书义
受保护的技术使用者:六安市智木瓜科技服务有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!