一种工业机器人的制作方法
1.本发明涉及机器人领域,尤其涉及一种工业机器人。
背景技术:
2.工业机器人是用于制造生产的机器人系统;工业机器人的定义是自动化的、可编程的,有三个及以上运动轴的自动化装置;机器人的典型应用包括焊接、绘画、组装、挑选和移动用于印制电路板、包装、打标签、夹板装载、产品检验和测试等工序;所有这些应用都是以高耐用性、高速度和高精度完成的;它们还可以协助物料输送。
3.由于玻璃片轻薄易碎,搬运起来麻烦,故在对玻璃片搬运时常用到工业机器人,但是此领域常规的工业机器人只加装了用于固定玻璃的真空吸盘,而缺少相应的防护结构,所以在真空吸盘损坏时容易出现玻璃片脱落的现象,具有一定的安全隐患。
技术实现要素:
4.有鉴于此,本发明要解决的技术问题在于提供一种工业机器人,本装置能够在搬运玻璃片时对玻璃片进行双重固定,进一步保护玻璃片。
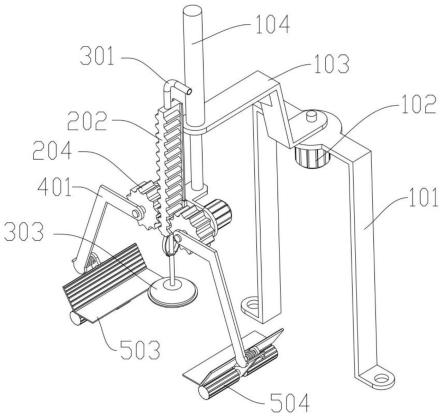
5.包括安装板,安装板上转动连接有两个齿轮,安装板上开设有限位槽,限位槽内滑动连接有双面齿条,双面齿条与两个齿轮啮合传动,双面齿条内滑动连接有滑管,滑管下端固定连接有吸盘,两个齿轮上均固定连接有开合臂,两个开合臂上均转动连接有支撑杆,两个支撑杆上均固定连接有夹板,安装板上连接有移动机构,两个支撑杆上均连接有检测机构。
6.所述检测机构包括压辊,每个支撑杆上均转动连接有压辊,每个支撑杆与开合臂之间均固定连接有扭簧。
7.每个所述开合臂上均固定连接有挡杆,每个支撑杆上均固定连接有卡块。
8.每个所述夹板下端均固定连接有振动电机。
9.所述滑管与双面齿条之间固定连接有两个弹片。
10.每个所述夹板上均设置有多个凸棱。
11.所述双面齿条上端固定连接有软管。
12.所述安装板上固定连接有第一驱动电机,一个齿轮固定连接在第一驱动电机的输出轴上。
13.所述驱动机构包括支座,支座上转动连接有转架,转架上固定连接有气缸,安装板固定连接在气缸的移动端。
附图说明
14.下面结合附图和具体实施方法对本发明做进一步详细的说明。
15.图1和图2为一种工业机器人的整体结构示意图;
16.图3为支座的结构示意图;
17.图4为转架的结构示意图;
18.图5为双面齿条的结构示意图;
19.图6为安装板的结构示意图;
20.图7为吸盘的结构示意图;
21.图8为夹板的结构示意图;
22.图9为齿轮的结构示意图;
23.图10为吸盘的结构剖视图。
具体实施方式
24.结合本发明实施例中的附图,对本发明进行详细描述。
25.参看5-10,示出了按照本发明中能够在搬运玻璃片时对玻璃片进行双重固定,进一步保护玻璃片的实施例的示意图,进一步地,
26.包括安装板201,安装板201上通过轴承转动连接有两个齿轮204,安装板201上开设有限位槽203,限位槽203内滑动连接有双面齿条202,双面齿条202与两个齿轮204啮合传动,双面齿条202内开设有气腔,双面齿条202内滑动连接有滑管304,滑管304下端通过螺栓固定连接有吸盘303,吸盘303与滑管304内部连通,两个齿轮204上均通过螺栓固定连接有开合臂401,两个开合臂401上均通过轴转动连接有支撑杆501,两个支撑杆501上均通过螺栓固定连接有夹板503,安装板201上连接有移动机构,两个支撑杆501上均连接有检测机构。
27.首先将本装置放置于待搬运玻璃片的上方,工作人员通过移动机构控制安装板201向下移动,使得吸盘303与玻璃片接触,通过将滑管304与抽真空设备连接,从而使得吸盘303能够将玻璃片吸住,实现对玻璃片初步固定的功能,此时两个开合臂401分别位于玻璃片的左右两侧。
28.工作人员通过控制两个齿轮204转动,从而分别带动两个开合臂401相互靠近,同时两个齿轮204带动双面齿条202在安装板201上向上滑动,双面齿条202带动吸盘303向上移动,吸盘303带动玻璃片向上移动,使得玻璃片处于悬空状态,此时两个开合臂401分别带动两个支撑杆501相互靠近,两个支撑杆501分别带动两个夹板503相互靠近,两个夹板503能够对玻璃片的边缘进行夹持,进一步对玻璃片进行固定,从而保证玻璃片的稳定性,实现对玻璃片双重固定的功能,避免出现玻璃片掉落的现象,同时两个夹板503下端能够将玻璃片托起,进一步对玻璃片进行保护。
29.参看图7-8,示出了按照本发明中能够玻璃片强度进行检测的实施例的示意图,进一步地,
30.检测机构包括压辊504,每个支撑杆501上均通过轴承转动连接有压辊504,每个支撑杆501与开合臂401之间均焊接固定连接有扭簧402。
31.在运输玻璃片时会由于玻璃片质量不合格而出现玻璃片破碎的现象,影响产品形象,在对玻璃片进行搬运之前,工作人员通过驱动机构带动安装板201向下移动,此时两个压辊504首先与玻璃片接触,由于两个支撑杆501均是内扣的状态,进而两个压辊504会向中间移动,两个支撑杆501分别向上转动,两个扭簧402均处于受力状态,而此时吸盘303刚好将玻璃片吸住,当玻璃片固定后,安装板201向上移动使得玻璃片悬空,此时工作人员控制
两个开合臂401张开,同时双面齿条202带动吸盘303向下移动,两个开合臂401张开时在两个扭簧402的作用下使得两个压辊504能够压紧玻璃片,由于此时玻璃片是悬空的,进而两个压辊504在逐渐向外移动过程中能够持续对玻璃片压紧,从而实现对玻璃片强度检测的功能,能够检测出玻璃片质量是否合格,同时吸盘303逐渐带动玻璃片向下移动,能够为两个开合臂401张开提供空间。
32.两个压辊504均为橡胶材质,压辊504与玻璃片接触后能够产生自转,进而防止玻璃片上出现划痕。
33.参看图8,示出了按照本发明中能够实现对两个支撑杆501定位的功能的实施例的示意图,进一步地,
34.每个所述开合臂401上均焊接固定连接有挡杆403,每个支撑杆501上均焊接固定连接有卡块502。
35.在两个扭簧402的作用下能够使得两个支撑杆501均具有向外张开的趋势,两个支撑杆501上的卡块502分别被两个挡杆403所挡住,从而实现对两个支撑杆501定位的功能,保证两个支撑杆501处于内扣的的状态,便于与玻璃片接触后向中间移动。
36.参看图7,示出了按照本发明中能够对玻璃板的抗振性能进行检测的示意图,进一步地,
37.每个所述夹板503下端均通过螺栓固定连接有振动电机505。
38.当两个压辊504将玻璃板压紧时分别启动两个振动电机505,两个振动电机505发出振动,能够使得两个压辊504逐渐向外移动的过程中对玻璃片产生振动,从而能够对玻璃板的抗振性能进行检测,进一步检测玻璃片的质量。
39.参看图10,示出了按照本发明中能够使得吸盘303紧压在玻璃片上的实施例的示意图,进一步地,
40.滑管304与双面齿条202之间焊接固定连接有两个弹片305。
41.当吸盘303向下移动与玻璃片接触时,吸盘303带动滑管304向双面齿条202内部滑动,同时两个弹片305受力产生压缩,两个弹片305的反向作用力能够使得吸盘303紧压在玻璃片上,并且在弹性作用下不会对玻璃片造成损坏。
42.参看图8,示出了按照本发明中能够增加夹板503与玻璃片边缘的摩擦力的实施例的示意图,进一步地,
43.每个所述夹板503上均设置有多个凸棱506。
44.多个凸棱506与夹板503一体成型,能够增加夹板503与玻璃片边缘的摩擦力,从而起到防滑的作用。
45.参看图6-7,示出了按照本发明中便于将吸盘303与玻璃片中间的空气抽出的实施例的示意图,进一步地,
46.双面齿条202上端通过螺栓固定连接有软管301。
47.软管301用于与现有的抽真空设备连接,通过抽真空设备将吸盘303与玻璃片中间的空气抽出,从而实现对玻璃片的固定。
48.参看图6,示出了按照本发明中实现对两个齿轮204和双面齿条202的驱动的实施例的示意图,进一步地,
49.安装板201上通过螺栓固定连接有第一驱动电机205,一个齿轮204通过联轴器固
定连接在第一驱动电机205的输出轴上。
50.启动第一驱动电机205,第一驱动电机205带动一个齿轮204转动,从而实现对两个齿轮204和双面齿条202的驱动。
51.参看图4,示出了按照本发明中能够实现控制安装板201上下移动的功能的实施例的意图,进一步地,
52.驱动机构包括支座101,支座101上通过轴承转动连接有转架103,转架103上通过螺栓固定连接有气缸104,安装板201通过螺栓固定连接在气缸104的移动端。
53.工作人员通过控制气缸104的移动端伸缩,进而实现控制安装板201上下移动的功能。
54.参看图3,示出了按照本发明中能够实现对玻璃片搬运的功能的实施例的意图,进一步地,
55.支座101上通过螺栓固定连接有第二电机102,转架103通过联轴器固定连接在第二电机102的输出轴上。
56.启动第二电机102,第二电机102带动转架103转动,转架103带动安装板201转动,从而实现对玻璃片搬运的功能。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1