一种机器人定位方法及机器人定位系统与流程
本技术涉及物流机器人自动定位领域,具体涉及一种机器人定位方法及机器人定位系统。
背景技术:
1、机器人定位技术又可分为绝对定位和相对定位两大技术,绝对定位主要采用导航信标、主动或被动标识、地图匹配或卫星导航技术(gps)进行定位,定位精度较高,这几种方法中,信标或标识牌的建设和维护成本较高,地图匹配技术处理速度慢,而gps只能用于室外,具有室内卫星信号不强的缺陷目前精度还很差。室内机器人相对定位技术中精度较高的nokov室内定位技术,主要用于实时准确测量,可以从多个高速摄像机的连续图像序列里,确定某个点在空间中的位置和运动轨迹,获取得到的实时刚体位姿数据通过sdk发送到地面站,地面站输出控制命令进一步控制无人机的运动;但此种定位技术需要设置很多标志点,且标志点不能被遮挡否则机器人则会完全无法实现实时定位,对于工作环境复杂的物流机器人而言并不适用。
2、现有技术中由于室内卫星信号不强的缺陷导致物流机器人的室内定位精度难以提高,且精确定位技术产生的能耗较大且费用较高不适合物流机器人全程开启使用,本发明的机器人定位方法通过精度较低的定位系统生成一阶位置信息,通过近场信息交互生成纠正位置信息,将一阶位置信息以及纠正位置信息配合进行位置精确调整用于运输机器人日常工作,通过设置可以运动并进行路径记录的辅助定位车进行运输机器人的精确定位,当一阶位置信息以及纠正位置信息偏差过大,运输机器人自身定位发生错误不能进行精确位置定位时,使用辅助定位车发送精确的二阶位置信息进行二阶位置定位,辅助定位车作为获得精确位置信息的辅助设备,日常使用运输机器人时可以不必开启,节省能源并同时可以降低设备损耗。
技术实现思路
1、为实现上述目的,本发明采取的技术方案为:
2、一种机器人定位方法,包括如下步骤:
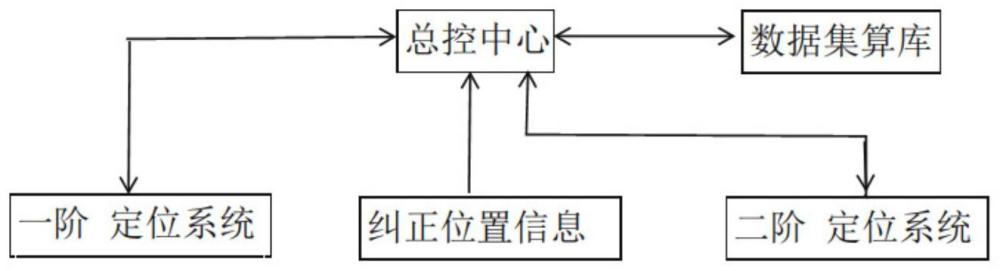
3、a)运输机器人将一阶位置信号发送至总控中心,总控中心对运输机器人1 进行初步定位并确定运输机器人的初步位置;
4、具体的,包括步骤:a1)本发明根据运输仓库的面积在运输仓库中四角位置以及进出口位置分别设置具有不同地址的无线ap,而后根据无线ap的辐射面积在运输仓库内均匀设置若干具有不同地址的无线ap,并在运输机器人上设置有可以扫描并接受无线ap信号的信号接收器、向总控中心发送信号的信号发生器、rfid芯片以及终端控制器;
5、a2)总控中心将运输机器人发送的信号中数据进行处理并转送至数据集算库,数据处理包括对若干无线ap信号地址以及强度进行匹配,数据集算库对转送的数据进行集算,得到运输机器人的初步位置;
6、b)运输机器人与相应工作货架进行进场信息交互,生成纠正位置信息并发送至总控中心;具体的,包括步骤:
7、总控中心根据计算得到的运输机器人的初步位置控制运输机器人行进运动以及装卸货工作,在所述运输机器人进行装卸货工作时所述rfid芯片抵近相应工作的货架,货架上的近场感应芯片将纠正位置信息发送至总控中心,总控中心对运输机器人的初步位置进行匹配;本发明的机器人定位方法通过精度较低的定位系统生成一阶位置信息,通过近场信息交互生成纠正位置信息,将一阶位置信息以及纠正位置信息配合进行位置精确调整用于运输机器人日常工作,使用精度较低的定位系统不仅节省成本,在运输机器人进行室内定位时更能够通过纠正位置信息对运输机器人位置进行纠正,满足运输机器人的日常工作需要。
8、c)总控中心可以对一阶位置定位信号生成的初步位置与纠正系统的纠正位置信息进行匹配并判断是否开启二阶位置定位系统;开启二阶位置定位系统后总控中心与辅助定位车建立通信连接并进行路径记录信息交互;
9、具体的,若开启二阶位置定位,包括步骤:c1)若总控中心对运输机器人的初步位置与货架上的近场感应芯片位置进行匹配后发现定位错误,则向运输机器人1的终端控制器发送止动信号停止运输机器人的全部工作;
10、c2)运输机器人接收到止动信号后终端控制器控制将辅助定位车下放,辅助定位车开启红外线定位设备以及路径记录系统,再次通过扫描并接受无线ap 信号进行初步定位并自动运动寻找数据收集机器人;
11、通过设置可以运动并进行路径记录的辅助定位车进行运输机器人的精确定位,当一阶位置信息以及纠正位置信息偏差过大,运输机器人自身定位发生错误不能进行精确位置定位时,使用辅助定位车发送精确的二阶位置信息进行二阶位置定位,辅助定位车作为获得精确位置信息的辅助设备,日常使用运输机器人时可以不必开启,节省能源并同时可以降低设备损耗。
12、c3)辅助定位车经过运动找寻到数据收集机器人后可以通过红外线定位设备定位辅助定位车与数据收集机器人之间的距离m,并通过将距离m以及路径记录系统记录的路径发送至总控中心对运输机器人进行精确定位;
13、物流运输仓库由于日常货物运输频繁,货架以及货物位置改动会造成物流机器人的许多定位手段失效,数据收集机器人可以实时收集物流运输仓库的位置地图,并将信息反馈至中控系统,控制物流机器人运动;进一步的,数据收集机器人由于自身实时绘制收集物流运输仓库的位置地图,其定位在云端是完全准确的,通过辅助定位车与数据收集机器人之间相对距离可以获得辅助定位车的精确位置,进一步可以得到物流机器人的精确位置。
14、d)得到物流机器人的精确位置后关闭二阶位置定位系统,辅助定位车原路返回至运输机器人并被运输机器人回收,运输机器人重新开启工作。
15、机器人定位系统,包括物流机器人、固定设置于所述物流机器人上的辅助定位车以及数据收集机器人、设置于云端的中控系统以及数据集算库;所述机器人定位系统包括可以获取一阶位置信息的一阶位置定位系统,可以通过近场信息交互生成纠正位置信息的纠正系统以及可以通过中控系统判断是否开启的二阶位置定位系统。
16、优选的,总控中心对一阶位置定位信号生成的初步位置与纠正系统的纠正位置信息进行匹配并判断是否超过阈值,当超过预设阈值时总控中心开启二阶位置定位系统,开启二阶位置定位系统后总控中心与辅助定位车建立通信连接并进行路径记录信息交互。
17、优选的,物流机器人上设置有可以扫描并接受无线ap信号的信号接收器、向总控中心发送信号的信号发生器、rfid芯片以及终端控制器。
18、进一步的,物流机器人上还设置有底架,底架前后两端设置有驱动系统,在所述底架上还固定有左支架以及右支架,所述支架以及右支架之间固定设置有辅助定位车。
19、进一步的,所述底架上位于左支架以及右支架上方还设置有上支架,所述上支架上固定设置有升降结构,所述升降结构顶部设置有置物平台,所述置物平台的侧边缘上设置有突起支架,所述rfid芯片设置在所述突起支架上。本发明通过设置可以升降的置物平台一方面可以方便物流机器人进行货架上的装卸货操作,另一方面在置物平台上突出设置rfid芯片可以方便rfid芯片与货架上的近场系统进行信息交互,生成纠正位置信息对运输机器人位置进行纠正,满足运输机器人的日常工作需要。
20、优选的,所述上支架上还转动设置有定位栓,所述定位栓可以在总控中心的控制下进行转动,可以通过控制开启关闭定位栓实现辅助定位车的横向定位避免辅助定位车在物流机器人移动时意外掉落。
21、进一步的,所述辅助定位车包括红外线定位设备以及路径记录系统,所述路径记录系统包括设置在辅助定位车前端以及后端的摄像系统,所述红外线定位设备包括红外线发生器以及红外线接收器,所述红外线发生器转动设置在所述辅助定位车的顶部平台上,并突出于所述顶部平台设置,所述红外线接收平器围绕所述顶部平台设置。本发明通过可以旋转的红外线发生器以及围绕顶部平台设置的红外线接收平器可以在辅助定位车的运动中向四周发射红外线便于找到数据收集机器人。
22、优选的,辅助定位车的行走结构设置为履带式行走结构,通过所述履带式行走结构方便辅助定位车自所述支架以及右支架之间移动至地面进行降阶行走克服离地间距离开所述物流机器人。
23、进一步的,数据收集机器人包括测绘系统以及红外线反射结构,所述测绘系统包括测绘距离遥感器以及实景测绘系统,所述测绘距离遥感器设置在数据收集机器人的顶部平台,并通过支架突出于数据收集机器人的顶部平台一定距离h,h为0.5m-0.8m,所述红外线反射结构通过固定片固定设置在数据收集机器人上。
24、有益效果
25、(1)本发明的机器人定位方法通过精度较低的定位系统生成一阶位置信息,通过近场信息交互生成纠正位置信息,将一阶位置信息以及纠正位置信息配合进行位置精确调整用于运输机器人日常工作,使用精度较低的定位系统不仅节省成本,在运输机器人进行室内定位时更能够通过纠正位置信息对运输机器人位置进行纠正,满足运输机器人的日常工作需要。
26、(2)进一步的,本发明还通过设置可以运动并进行路径记录的辅助定位车进行运输机器人的精确定位,当一阶位置信息以及纠正位置信息偏差过大,运输机器人自身定位发生错误不能进行精确位置定位时,使用辅助定位车发送精确的二阶位置信息进行二阶位置定位,辅助定位车作为获得精确位置信息的辅助设备,日常使用运输机器人时可以不必开启,节省能源并同时可以降低设备损耗。
27、(3)物流运输仓库由于日常货物运输频繁,货架以及货物位置改动会造成物流机器人的许多定位手段失效,因此本发明设置了定位在云端是完全准确的数据收集机器人,通过辅助定位车与数据收集机器人之间相对距离可以获得辅助定位车的精确位置,进一步可以得到物流机器人的精确位置。
- 还没有人留言评论。精彩留言会获得点赞!