能够及时止转的钕铁硼永磁体粉料分装设备及控制方法与流程
1.本发明涉及钕铁硼永磁体加工技术领域,特别是涉及能够及时止转的钕铁硼永磁体粉料分装设备及控制方法。
背景技术:
2.相对于铸造al-ni-co系永磁材料和铁氧体永磁材料,钕铁硼具有极高的磁能积和矫顽力,可吸起相当于自身重量的640倍的重物。钕铁硼永磁体被广泛地应用于现代工业和电子技术中。我司目前在钕铁硼永磁体进行加工时,需要对粉料进行分装,因此发明人基于带有接排槽的滚轮设计了分装机,利用接排槽转动到顶部进行接料、转动到底部进行排料的方式实现粉料的分装。
3.但由于接排槽的空间固定,导致分装量固定,不能满足不同分装量的需求,因此发明人考虑将其改进为可调分装量,并采用半齿轮与从动齿轮配合的方式实现滚轮的间歇转动以方便分装。然而由于滚轮是从动件,这样在半齿轮与从动齿轮失去啮合时,从动齿轮及滚轮易受到惯性作用而继续转动,导致接排槽位置出现较大偏移,使接排料出现较大偏差。
技术实现要素:
4.基于此,有必要针对现有分装量不能调整、接排量时滚轮止转不及时的问题,提供能够及时止转的钕铁硼永磁体粉料分装设备及控制方法。
5.本发明采用以下技术方案实现:
6.第一方面,本发明公开了能够及时止转的钕铁硼永磁体粉料分装设备,包括外壳、滚轮、上料机、隔板、距离传感器一、控制器、驱动机构、止转机构。
7.外壳为卧向设置的圆柱形结构,其顶部连接有进料管,底部连接有下料管。滚轮转动设置在外壳内、形状与外壳内腔对应。滚轮侧向设置有接排槽。
8.上料机位于进料管上方,用于向进料管加料。隔板可移动地设置在接排槽内,将接排槽分为空间一和空间二。其中,空间一较空间二相比,更远离滚轮中心,用于装粉料。进料管用于在接排槽转动到顶部时向空间一加粉料。空间一用于在接排槽转动到底部时通过下料管排粉料。隔板连接有调节机构,用于调整隔板在接排槽内的位置。
9.距离传感器一设置在隔板面向接排槽底部的一侧,用于检测隔板与接排槽底部的距离一。控制器根据距离一控制调节机构工作。
10.驱动机构用于驱动滚轮工作。驱动机构包括连接筒、从动齿轮、半齿轮、电机。连接筒与滚轮同轴连接。连接筒伸出外壳,外端设置有从动齿轮。电机固定在外壳上,其输出端连接有半齿轮。半齿轮与从动齿轮配合。半齿轮驱动从动齿轮通过连接筒带着滚轮间歇转动,用于给接排料过程留出时间。
11.止转机构用于对从动齿轮及滚轮进行止转。止转机构包括凸轮、倒u形架、卡头、固定架。凸轮与半齿轮同轴连接。固定架位于凸轮上方,并连接在外壳上。倒u形架的两支腿贯穿固定架,其中一支腿抵住凸轮侧壁。卡头连接在倒u形架的另一支腿底端,用于对从动齿
轮止转。
12.其中,半齿轮与从动齿轮啮合时,凸轮将倒u形架顶起,并使卡头与从动齿轮失去卡合。半齿轮与从动齿轮失去啮合时,凸轮将倒u形架降下,并使卡头卡合从动齿轮。
13.该分装设备的实现根据本公开的实施例的方法或过程。
14.第二方面,本发明公开了能够及时止转的钕铁硼永磁体粉料分装设备的控制方法,其应用于第一方面的能够及时止转的钕铁硼永磁体粉料分装设备。
15.能够及时止转的钕铁硼永磁体粉料分装设备的控制方法包括:
16.步骤一、输入分装量u,根据一个预先设置好的距离一-分装量表,查询与u对应的距离一l1;
17.步骤二、驱动隔板移动到l1所对应的位置处;
18.步骤三、根据一个预先设置好的距离一-速度表,查询与l1所对应的上料机上料速度v1;
19.步骤四,驱动电机依照w运行、上料机依照v1运行。
20.该控制方法的实现根据本公开的实施例的方法或过程。
21.与现有技术相比,本发明具备如下有益效果:
22.1,本发明基于在排料槽内设置了可调整位置的隔板,从而将排料槽分为可调容量的空间一和空间二,并使用更远离滚轮中心的空间一进行接排;由于空间一容量可调,即实现分装量的调整。
23.2,本发明基于半齿轮与从动齿轮配合,使半齿轮驱动从动齿轮通过连接筒带着滚轮间歇转动,使接料槽在移动到顶部、底部时进行会进行驻停,从而给接排料过程留出足够的时间,保证接排料完全;同时还设置了基于凸轮、倒u形架的配合,利用凸轮转动将倒u形架顶起或落下,使卡头与从动齿轮实现放开或卡合,从而使从动齿轮及滚轮及时止转。
24.3,本发明基于控制器控制,根据距离一调整上料机上料速度,使上料速度与空间一的接排量匹配,避免出现分装机顶部溢料或分装缺料。
25.4,本发明还在进料斗内设置了可摆动的导料板,并利用与驱动机构配合的移动杆对导料板进行作用。随着移动杆在驱动机构作用下产生往复移动,导料版也跟着进行偏摆,这样改变粉料落下的区域,使粉料更均匀地落入进料管,这样也可避免空间一出现一侧满、另一侧不满的情况。
26.5,本发明还在进料斗设置了距离传感器二,并基于距离传感器二采集的距离一二对电机进行控制,降低实际误差的影响,优先保证进料管始终有足够的粉料,避免出现空间一接不满料而使最后的分装量不正确的情况。
附图说明
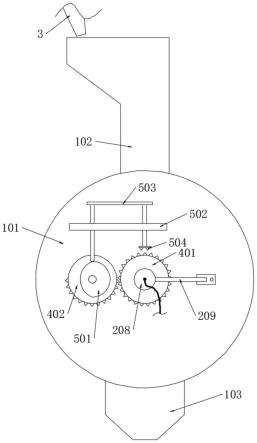
27.图1为本发明中实施例1的能够及时止转的钕铁硼永磁体粉料分装设备的结构图;
28.图2为图1中外壳内部结构图;
29.图3为图1中的剖视图;
30.图4为本发明中实施例2的能够及时止转的钕铁硼永磁体粉料分装设备的结构图;
31.图5为图4中内部结构图;
32.图6为图5的局部放大图。
33.附图中,各标号所代表的部件列表如下:
34.101、外壳,102、进料管,103、下料管,104、距离传感器二,105、导料板,106、进料斗,201、滚轮,202、接排槽,203、隔板,204、距离传感器一,205、电动推杆,206、穿线通道,207、连接筒,208、旋转接线器,209、安装架,3、上料机,401、从动齿轮,402、半齿轮,501、凸轮,502、固定架,503、倒u形架,504、卡头,601、移动杆,602、连板,603、推拉杆,604、套筒,605、曲柄,606、从动轴,607、支撑板,608、锥齿轮一,609、锥齿轮二,610、滑轨,611、滑块,612、连杆。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.需要说明的是,当组件被称为“安装于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
37.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
38.实施例1
39.请参看图1,图1为实施例1中能够及时止转的钕铁硼永磁体粉料分装设备的结构图。本实施例公开了能够及时止转的钕铁硼永磁体粉料分装设备,包括外壳101、滚轮201、上料机3、隔板203、距离传感器一204、控制器、驱动机构、止转机构。
40.外壳101为卧向设置的圆柱形空腔结构,顶部连接有进料管102,底部连接有下料管103。
41.滚轮201转动设置在外壳101内、形状与外壳101内腔对应,也是圆柱形。滚轮201侧向开有接排槽202,接排槽202会跟着滚轮201一起运动。上料机3位于进料管102上方,用于向进料管102加料。
42.参看图2,为图1的内部结构图。隔板203可移动地设置在接排槽202内,将接排槽202分为空间一和空间二。空间一较空间二更远离滚轮201中心,用于装粉料。参看图2,当接排槽202转动到顶部时,空间一与进料管102连通,进料管102即向空间一加粉料。当接排槽202转动到底部时,空间一与下料管103连通,空间一即通过下料管103排粉料。
43.滚轮201由驱动机构驱动工作。参看图3,为图1中的剖视图。本实施例中,驱动机构包括连接筒403、从动齿轮401、半齿轮402、电机。连接筒403与滚轮201同轴连接。连接筒403伸出外壳101,外端装有从动齿轮401。电机固定在外壳101上,其输出端连接有半齿轮402。半齿轮402与从动齿轮401配合。半齿轮402驱动从动齿轮401通过连接筒403带着滚轮201间歇转动,用于给接排料过程留出时间。
44.具体的,本实施例中,半齿轮402与从动齿轮401外径及齿距相同。这样半齿轮402转动一圈,从动齿轮401转动半圈,且使接排槽202从顶部转动至底部或从底部转动至顶部。
45.当然,本实施例设置了止转机构,用于对从动齿轮401及滚轮201进行止转。参看图1,止转机构包括凸轮501、倒u形架503、卡头504、固定架502。凸轮501与半齿轮402同轴连接。固定架502位于凸轮501上方,并连接在外壳101上。倒u形架503的两支腿贯穿固定架502,其中一支腿抵住凸轮501侧壁。卡头504连接在倒u形架503的另一支腿底端,用于对从动齿轮401止转。其中,凸轮501设有一凸起部,用于将倒u形架503顶起。
46.更详细的说,随着半齿轮402转动,其齿牙段先与从动齿轮401啮合,此时凸轮501的凸起部与倒u形架503一支腿配合,将倒u形架503整个顶起,这样卡头504远离从动齿轮401,使卡头504与从动齿轮401失去卡合,这样从动齿轮401即可自由转动,从而受到半齿轮402齿牙段驱动而转动半圈,使接排槽202从底部转动至顶部,此时接排槽202与进料管102连通、进行接料;
47.然后半齿轮402继续转动,其齿牙段与从动齿轮401失去啮合,此时凸轮501的凸起部与倒u形架503一支腿失去配合,使倒u形架503整个落下,从而使卡头504卡合从动齿轮401,这样从动齿轮402受到限制而立刻止转,进而使滚轮201产生驻停,给接料留出足够的时间;
48.之后半齿轮402继续转动,其齿牙端与从动齿轮401再次啮合,此时凸轮501的凸起部与倒u形架503一支腿配合,将倒u形架503整个顶起,这样卡头504远离从动齿轮401,使卡头504与从动齿轮401失去卡合,这样从动齿轮401即可自由转动,从而受到半齿轮402齿牙段驱动而转动半圈,使接排槽202从顶部转动至底部,此时接排槽202与排料管103连通、进行排料;
49.类似的,半齿轮402继续转动,其齿牙段与从动齿轮401失去啮合,此时凸轮501的凸起部与倒u形架503一支腿失去配合,使倒u形架503整个落下,从而使卡头504卡合从动齿轮401,这样从动齿轮402受到限制而立刻止转,而使滚轮201产生驻停,给排料留出足够的时间,这样在下料管103出口进行装料即可。
50.这样,驱动机构、止转机构使滚轮201周期性重复上述动作,保证滚轮201及时止转,从而实现定量的接排料。
51.隔板203连接有调节机构,用于调整隔板203在接排槽202内的位置。参看图3,本实施例中,调节机构包括电动推杆205、旋转接线器208、安装架209。电动推杆205装在空间二中。电动推杆205的一端连接接排槽202内底,另一端连接隔板203。电动推杆205伸缩即带动隔板203在接排槽202内移动,改变空间一的容量进而实现分装量的调整。
52.滚轮201开有与连接筒207连通的通孔,并构成用于电动推杆205供电线穿过的通道。旋转接线器208装在连接筒207外端中心。安装架209一端连接旋转接线器208,另一端连接外壳101。具体的,安装架209对旋转接线器208进行固定,而旋转接线器208与电动推杆205供电线连接,使电动推杆205供电线在滚轮201转动时不会扭转,保证电动推杆205正常工作。
53.距离传感器一204装在隔板203面向接排槽202底部的一侧,用于检测隔板203与接排槽202底部的距离一。需要说明的是,由于接排槽202容积固定,空间二的容积可基于距离一通过立方体公式(空间二的容积等于接排槽截面面积乘以距离一)计算,这样空间一的容
积=接排槽202容积-空间二的容积,可建立距离一与空间一的对应关系,即距离一-分装量表。
54.控制器用于根据距离一控制调节机构工作,即依据所需分装量确定所对应的距离一,控制调节机构使隔板203移动该距离一所对应的位置并定位。具体的,在本实施例中,即控制电动推杆205伸缩,将隔板203移动到距离一所对应的位置并定位。
55.当然,控制器还可用于控制电机以恒定速度w转动,并根据距离一调整上料机3上料速度。其中,电机以恒定速度w转动,便于给分装留出固定的时间,避免造成工序时序的错乱。
56.而当距离一增大,即对应的分装量变小,也就是说上料量要变小,即控制上料机3上料速度减小。相反的,当距离一减小,即对应的分装量变大,也就是说上料量要变大,即控制上料机3上料速度增大。
57.本实施例还同步提供了能够及时止转的钕铁硼永磁体粉料分装设备的控制方法,其应用于上述的能够及时止转的钕铁硼永磁体粉料分装设备。该控制方法包括:
58.步骤一、输入分装量u,根据一个预先设置好的距离一-分装量表,查询与u对应的距离一l2。
59.其中,分装量u即为所需的分装量,其数值根据实际分装规格确定。距离一-分装量表征距离一与空间一容量的对应关系。
60.步骤二、驱动隔板203移动到l2所对应的位置处。
61.控制器控制电动推杆205伸缩,将隔板203移动到距离一所对应的位置处,即使的隔板203完成定位。
62.步骤三、根据一个预先设置好的距离一-速度表,查询与l2所对应的上料机上料速度v1。
63.其中,距离一-速度表表征距离一和上料机3上料速度的对应关系。参考上面的,距离一和上料机3上料速度呈负相关。具体的,距离一取一个值后即对应的有一固定的分装量,而由于电机的转动速度不变,滚轮203完成一圈转动的时间周期也是不变的,该时间周期内的空间一的接排量也固定了。因此,上料机3上料速度应当满足该时间周期内的空间一的接排量。基于此,建立出距离一-速度表。
64.步骤四,驱动电机依照w运行、上料机3依照v1运行。
65.依据l2获得w,v1相匹配,可使本分装设备正常工作。
66.实施例2
67.本实施例提供了另一种能够及时止转的钕铁硼永磁体粉料分装设备,与实施例1不同之处在于,本实施例可提高进料管102下料的均匀性,避免空间一出现一侧满、另一侧不满的情况。
68.参看图4、图5,在实施例1结构的基础上,进料管102顶部连接有上大下小的进料斗106,上料机3偏向进料斗106一侧进料。参看图6,进料斗106内设置有可偏摆的导料板105,用于承接上料机3的加料,并使粉料均匀落入进料管102。具体的,导料板105倾斜设置,其顶端与进料斗106内壁铰接。导料板105配合有移动杆601。移动杆601贯穿进料斗106一侧侧壁,移动杆601内端抵住导料板105。移动杆601与驱动机构传动配合,用于实现移动杆601的往复移动,进而带动导料板105往复偏摆。
69.本实施例中,传动可设计如下:半齿轮402同轴连接有锥齿轮一608,锥齿轮一608垂直啮合有锥齿轮二609,锥齿轮二609固定在从动轴606的底端。从动轴606向上穿过并转动连接固定架502。从动轴606上连接有曲柄605,曲柄605装有套筒604。移动杆601外端连接有纵向的连板602。连板602和套筒604之间设置有推拉杆603:具体的,推拉杆603一端与套筒604连接、另一端与连板602铰接。这样,电机还带动锥齿轮一608驱动锥齿轮二608带着从动轴606转动,从而使曲柄605带着套筒604转动,这样推拉杆603对连板602进行推拉,进而使移动杆601产生往复移动。由于移动杆601抵住导料板105,随着移动杆601的移动,导料版105自然也跟着进行偏摆,这样改变粉料落下的区域,使粉料更均匀地落入进料管102,这样也可避免空间一出现一侧满、另一侧不满的情况。
70.当然,为了对移动杆601进行移动导向,还可在进料管102外壁连接上支撑板607,支撑板607上装有横向的滑轨610,滑轨610上滑动连接有滑块611;滑块611通过连杆612与连板602连接,这样利用滑块611、滑轨610对移动杆601进行导向。此外,为了提供从动轴606工作的稳定性,也可将从动轴606顶端与支撑板607采用轴承实现转动连接,避免从动轴606转动时中心发生偏移。
71.本实施例也同步提供了一种能够及时止转的钕铁硼永磁体粉料分装设备的控制方法,其应用于本实施例中的能够及时止转的钕铁硼永磁体粉料分装设备。该控制方法与实施例1相同,此处不再赘述。
72.实施例3
73.本实施例提供了第三种能够及时止转的钕铁硼永磁体粉料分装设备,与实施例2不同之处在于,本实施例可降低实际误差的影响,例如部件加工规格误差、工作延迟误差等。
74.参看图5,在实施例2的结构基础上,进料斗106内装有距离传感器二104,用于检测其与进料管102内粉料的距离二;控制器还根据距离二控制电机工作。
75.具体的,本实施例还提供了一种能够及时止转的钕铁硼永磁体粉料分装设备的控制方法,其应用于本实施例中的能够及时止转的钕铁硼永磁体粉料分装设备。该控制方法包括以下步骤:
76.步骤一、输入分装量u,根据一个预先设置好的距离一-分装量表,查询与u对应的距离一l2;距离一-分装量表征距离一与空间一容量的对应关系;
77.其中,分装量u即为所需的分装量,其数值根据实际分装规格确定。距离一-分装量表征距离一与空间一容量的对应关系。
78.步骤二、驱动隔板203移动到l2所对应的位置处。
79.控制器控制电动推杆205伸缩,将隔板203移动到距离一所对应的位置处,即使的隔板203完成定位。
80.步骤三、根据一个预先设置好的距离一-速度表,查询与l2所对应的上料机3上料速度v1;距离一-速度表表征距离一和上料机3上料速度的对应关系;
81.其中,距离一-速度表表征距离一和上料机3上料速度的对应关系。具体参看实施例1,此处不再赘述。
82.步骤四,以t为周期,周期性获取距离传感器二105采集的距离二l2;
83.其中,对于一个t周期,其开始点、结束点均对应接排槽202从顶部转走的时刻。此
时空间一已完成接料,进料管102内粉料最少,采集的l2即为此时的值。
84.判断l2与预设阈值的关系并做对应控制:若l2大于预设阈值,说明此时进料管102内粉料较少,这就是由于误差等原因造成的,若不及时停止接排料,会出现下次接不满料的情况,因此暂停电机后再恢复、驱动上料机3依照v1运行。其中,电机的暂停时间设定为n*t,n=1、2、3、
…
,之后即恢复转动,这样可使后续采集时间依旧保持为接排槽202从顶部转走的时刻。而在电机暂停的这段时间内,上料机3向进料管102补料,以使l2小于预设阈值。
85.当然,n建议取1,因为若暂停时间过长,易出现粉料堆积从顶部溢出的情况。
86.若l2不大于预设阈值,说明此时进料管102内有足够的粉料,w,v1配合度好,则驱动电机依照w运行、上料机3依照v1运行。
87.其中,预设阈值根据实际规格取定。由于距离二是实时变化的,即步骤四为自循环步骤。具体的,周期性实时获取距离二数据l2,并依据l2与预设阈值的关系判断,进而对电机进行调控,优先保证进料管102始终有足够的粉料,避免出现空间一接不满料而使最后的分装量不正确的情况。
88.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
89.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1