一种多联升降装置及搬运机器人的制作方法
1.本技术涉及仓储物流机器人技术领域,尤其涉及一种多联升降装置及搬运机器人。
背景技术:
2.目前仓储物流领域所涉及的仓库立式货架高度都很高,通常在5-9米。为了更好地利用仓库空间,新建的部分立体仓库还通过将货架进行叠放的形式形成高层立式货架,其高度通常可达到10米甚至更高。而目前自动化仓库中所使用的货箱搬运机器人的作业高度普遍为2-4米,很难处理5米高度以上的高层货架。为此,需要有能达到高层货架高度且稳定性较好的货箱到人搬运机器人,以对高层货架上的货箱进行取放。
3.目前现有的多级升降货箱到人取货机器人的升降装置虽然可以实现较高的取货箱高度,但是装配成本高,提升后结构强度较低。现有使用同步齿形带方式实现提升的结构容易发生老化和变形问题;而采用齿轮齿条方式实现提升则会产生较大噪音,不利于仓储物流环节中的大规模使用。现有的链条传动方式实现的升降机构则通过使用两组传动链条和驱动装置分别对门架和取货机构进行提升、下降,结构较为复杂,且维护难度较大。
4.例如公告号为cn216071615u的实用新型专利提供了一种升降装置及搬运机器人,其升降装置包括第一门架和第二门架,第二门架可通过第一升降机构驱动并相对于第一门架升降;伸缩叉取货机构通过第二升降机构驱动以在第一门架上升降。其第一升降机构和第二升降机构独立设置,分别具有用于驱动的驱动装置和爬升电机,在第二门架升降时爬升电机随同升降。该技术方案即存在上述的结构和控制复杂、维护难度大、第二门架升降时爬升电机构成额外的负载从而系统效率不高等不足之处。
技术实现要素:
5.针对现有技术存在的以上不足之处,本技术的目的在于提供一种仅通过一组闭环链条实现升降单元以及第一支架升降的、结构和控制简单、维护方便、系统效率高的多联升降装置,以及基于该升降装置的搬运机器人。
6.为了实现上述目的,本技术提供了以下技术方案。
7.一种多联升降装置,包括升降单元,以及:第一支架,包括第一本体、第一上链轮、第一下链轮、第一抵接件,所述第一上链轮和所述第一下链轮均转动设置与所述第一本体,所述第一抵接件固定设置于所述第一本体;第二支架,包括第二本体、第二上链轮,所述第二上链轮转动设置于所述第二本体;升降机构,包括驱动装置和闭环链条,所述驱动装置适于双向驱动所述闭环链条;其中,所述升降单元上下滑动设置于所述第一支架上,所述升降单元相对于所述第一支架滑动至最高位置时抵接至所述第一抵接件;所述第一支架上下滑动设置于所述第二支架上,所述闭环链条依次绕过所述第二上链轮上方、所述第一下链轮下方、所述第一上链轮上方并传动连接至所述驱动装置;所述升降单元固定连接至所述闭环链条在所述第一上链轮两侧的位置。
8.在一些实施方式中,所述第一本体包括第一上横梁和两个第一立柱,两个所述第一立柱分别和所述第一上横梁固定连接,两个所述第一立柱沿水平的第一方向间隔设置,构成门架结构;所述升降单元的两侧分别通过一第一导向装置上下滑动设置于所述第一立柱上。
9.在一些实施方式中,所述第一立柱具有上下延伸的第一导槽,所述第一导槽位于所述第一立柱在所述第一方向的内侧;所述第一导向装置包括若干导向轮,所述导向轮与所述第一导槽匹配设置,使所述第一导向装置适于在所述第一导槽内上下滑动。
10.在一些实施方式中,所述升降单元固定设置有链条张紧装置,所述闭环链条在安装前具有第一端和第二端,所述第一端和所述第二端分别固定至所述链条张紧装置的上下两端,构成闭环结构;所述链条张紧装置适于张紧所述闭环链条。
11.在一些实施方式中,所述第二本体包括第二上横梁和两个第二立柱,两个所述第二立柱分别和所述第二上横梁固定连接,两个所述第二立柱沿所述第一方向间隔设置,构成门架结构;两个所述第一立柱分别通过一第二导向装置上下滑动设置于所述第二立柱上。
12.在一些实施方式中,所述第二支架还包括第二下链轮,所述闭环链条依次绕过所述第二上链轮上方、所述第一下链轮下方、所述第一上链轮上方、所述第二下链轮下方后回到所述第二上链轮上方构成闭环;所述驱动装置固定设置于所述第二本体,所述驱动装置与所述第二下链轮双向传动连接,以适于通过所述第二下链轮双向驱动所述闭环链条,或,所述驱动装置通过一驱动链轮双向驱动所述闭环链条。
13.在一些实施方式中,还包括第三支架,所述第三支架包括第三上链轮和第三下链轮;所述第二支架还包括第二下链轮;所述闭环链条依次绕过所述第三上链轮上方、所述第二下链轮上方、所述第二上链轮上方、所述第一下链轮下方、所述第一上链轮上方、所述第三下链轮下方后回到所述第三上链轮上方构成闭环;所述驱动装置固定设置于所述第三支架;所述驱动装置与所述第三下链轮双向传动连接,以通过所述第三下链轮驱动所述闭环链条,或,所述驱动装置通过一驱动链轮双向驱动所述闭环链条。
14.在一些实施方式中,所述闭环链条、所述第一上链轮、所述第一下链轮、所述第二上链轮的数量均为两个,分别设置于所述升降单元的两侧;所述驱动装置适于同步驱动两个所述闭环链条。
15.在一些实施方式中,所述驱动装置包括减速电机和中间轴,所述减速电机的输出轴和所述中间轴上均固定设置有驱动链轮,所述减速电机的输出轴和所述中间轴之间通过传动链条传动连接;所述中间轴还通过一驱动链轮传动连接至所述闭环链条。
16.本技术还提供了一种搬运机器人,包括:前述的任一种多联升降装置;底盘,用于固定所述多联升降装置;货物取放装置,用于取放货物;其中,所述货物取放装置固定连接至所述升降单元。
17.在一些实施方式中,还包括若干暂存货架单元,所述暂存货架单元固定连接至所述底盘并上下间隔设置;所述货物取放装置适于在所述暂存货架单元和立式货架之间取放货物。
18.在一些实施方式中,所述货物取放装置包括托架、伸缩叉和旋转机构,所述托架固定至所述升降单元,所述伸缩叉适于伸缩并叉取货物,所述旋转机构适于驱动所述伸缩叉
相对于所述升降单元在水平面内旋转。
19.本技术的各个实施例具有以下技术效果中的至少一种:
20.1.通过一条闭环链条,或在升降单元两侧各设置一条闭环链条构成一组,使升降单元和第一支架的升降驱动可通过同一驱动装置驱动,整个升降装置结构紧凑、驱动零部件数量少、控制简单、维护方便;
21.2.通过升降机构的联动设置,使较低位置的货物取放操作时仅需升降固定至升降单元的货物取放装置,而无需升降第一支架,从而降低总体能耗;同时第一支架上无需再设置重量较大的减速电机等驱动装置,提高了整个升降装置的稳定性和有效运载能力;
22.3.通过一体设置于第一支架和第二支架的立柱上的多个不同方向的导槽,使带有货物负载的升降单元以及第一支架在升降时更加稳定;
23.4.通过第三支架甚至更多支架的设置,并通过一组闭环链条完成升降,可通过多级支架的联动实现更高位置货物的取放。
附图说明
24.下面将以明确易懂的方式,结合附图说明优选实施方式,对本发明的上述特性、技术特征、优点及其实现方式予以进一步说明。
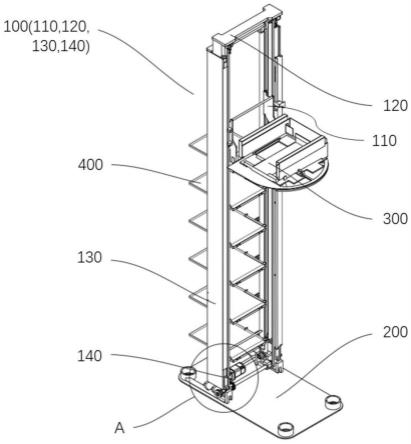
25.图1a是搬运机器人的一个实施例的立体图;
26.图1b是图1a中多联升降装置将货物取放装置升至最高的状态;
27.图2是图1a中局部a的放大图;
28.图3是第一支架的一个实施例的立体图;
29.图4是图3中局部b的放大图;
30.图5是图3中局部c的放大图;
31.图6是图3中局部d的放大图;
32.图7是第一立柱的一个实施例的横截面示意图;
33.图8是第二支架的一个实施例的立体图;
34.图9是第二立柱的一个实施例的横截面示意图;
35.图10是图8中局部e的放大图;
36.图11是图8中局部f的放大图;
37.图12是一个实施例的升降机构和升降单元的立体图;
38.图13是图12中局部g的放大图;
39.图14是图12中局部h的放大图;
40.图15是图13未显示部分零件时的部分结构示意图;
41.图16是货物取放装置的一个实施例的示意图;
42.图17是多联升降装置的工作原理示意图;
43.图18是图17的一种变化方式;
44.图19是多联升降装置的扩展方式示意图;
45.附图标号说明:
46.100.多联升降装置,110.升降单元,111.链条张紧装置,120.第一支架,121.第一本体,122.第一上链轮,123.第一下链轮,124.第一抵接件,125.第一上横梁,126.第一立
柱,127.第一导槽,128.第三导槽,130.第二支架,131.第二本体,132.第二上链轮,133.第二下链轮,135.第二上横梁,136.第二立柱,137.下横梁,138.第二导槽,140.升降机构,141.减速电机,142.中间轴,143.驱动链轮,144.传动链条,145.闭环链条,150.第一导向装置,160.第二导向装置,170.第三支架,172.第三上链轮,173.第三下链轮,180.第三导向装置,200.底盘,300.货物取放装置,310.托架,320.伸缩叉,330.旋转机构,400.暂存货架单元。
具体实施方式
47.为了更清楚地说明本技术的实施例或现有技术中的技术方案,下面将对照附图说明本技术的具体实施方式。下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
48.为使图面简洁,各图中只示意性地表示出了与本技术相关的部分,它们并不代表其作为产品的实际结构。在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
49.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
50.实施例一。如图1a所示,本实施例为图示搬运机器人的多联升降装置100,包括升降单元110,升降单元110可上下移动,升降单元110用于固定连接搬运机器人的货物取放装置300。多联升降装置100还包括第一支架120、第二支架130和升降机构140,升降机构140用于驱动升降单元110沿第一支架120升降,以及驱动第一支架120沿第二支架130升降。
51.如图3所示,第一支架120包括第一本体121,第一本体121包括第一上横梁125和两个第一立柱126,两个第一立柱126分别和第一上横梁125固定连接,两个第一立柱126沿水平的第一方向间隔设置,构成门架结构。第一方向即图3中第一上横梁125的长度方向。如图13所示,升降单元110的两侧分别通过一第一导向装置150上下滑动设置于第一立柱126上。第一支架120的具体结构以及升降单元110上下滑动设置的具体结构均可根据需要选择设置,例如第一支架120只要构成框架结构即可,并不局限于立柱和横梁的结构,第一导向装置150和第一立柱126上和第一导向装置150匹配的结构可以是导槽和导向轮的配合,也可以是导槽和导轨的配合,还可以是直线轴承和导向柱的配合等等。
52.如图4所示,第一上横梁125上通过轴承转动设置有第一上链轮122;如图6所示,第一立柱126下方通过轴承转动设置有第一下链轮123;如图4所示,第一上横梁125上还固定设置有第一抵接件124;第一抵接件124为液压缓冲器,用于在升降单元110上升至第一支架120顶部位置时抵接至升降单元110的顶部。
53.如图8所示,第二支架130包括第二本体131,第二本体131包括第二上横梁135、两
个第二立柱136和下横梁137,两个第二立柱136分别和第二上横梁135和下横梁137固定连接,两个第二立柱136沿第一方向间隔设置,构成门架结构,其中下横梁137也可省去,而将两个第二立柱136直接固定至搬运机器人的底盘200上。如图2和图5所示,两个第一立柱126分别通过一第二导向装置160上下滑动设置于第二立柱136上。和升降单元110滑动设置于第一立柱126上的结构类似,第二导向装置160及第二立柱136上与第二导向装置160匹配的结构也可有多种选择。
54.如图10所示,第二上横梁135上通过轴承旋转设置有第二上链轮132。如图2和图12所示,升降机构140包括驱动装置和闭环链条145,驱动装置由减速电机141等部件组成,适于双向驱动闭环链条145。升降单元110上下滑动设置于第一支架120上,且升降单元110相对于第一支架120滑动至最高位置时抵接至第一抵接件124。如图14、图15以及示意性的图17所示,闭环链条145依次绕过第二上链轮132上方、第一下链轮123下方、第一上链轮122上方后,再绕过驱动装置的驱动链轮143和第二支架130上的第二下链轮133后回到第二上链轮132上方。
55.如图17所示,升降单元110固定连接至闭环链条145在图中第一上链轮122右侧的位置,即在第一上链轮122和驱动装置的驱动链轮143之间。工作过程如下:
56.首先说明升降单元110的上升过程。从图17的左侧示意图开始,升降单元110处于最低位置,以图示方向观察时,此时驱动链轮143逆时针旋转,驱动闭环链条145使升降单元110上升;在图17的中间位置的示意图中,升降单元110上升至第一支架120的顶部并抵接至第一支架120的第一抵接件124(图中未示出),此时升降单元110无法再继续相对于第一支架120上升;在图17的右侧示意图中,当驱动链轮143在中间示意图的状态继续逆时针旋转时,升降单元110和第一支架120整体被闭环链条145提升,此时第一支架120伸出第二支架130顶部,使升降单元110上连接的货物取放装置300可以到达更高的位置。直至如图1b所示,第一支架120相对于第二支架130升值最高位置时,货物取放装置300也达到最高位置。
57.在需要使升降单元110下降时,在图17的中间或右侧示意图的状态下,均只需要控制驱动链轮143顺时针旋转,即可实现第一支架120和升降单元110的整体下降,或者在第一支架120降至最低位置后,升降单元110相对于第一支架120继续下降。在第二支架130底部可以设置由液压缓冲器构成的第二抵接件,用于抵接并缓冲升降单元110和第一支架120。
58.作为本实施例的变化方式,如图18所示,升降单元110也可固定连接至第一上链轮122左侧位置的闭环链条145上,即固定至位于第一上链轮122和第一下链轮123之间位置的闭环链条145上,也可实现类似的功能。其工作方式与图17类似,不再详述。
59.如图19所示,本技术的多联升降装置100还可进行扩展,在本实施例的基础上设置第三支架170,或者进一步设置更多级的联动支架。在图19中,第二支架130上下滑动设置于第三支架170上,并在第二支架130上升至最高位置时抵接至第三支架170上部。驱动装置的驱动链轮143设置于第三支架170上,升降单元110仍可固定至第一上链轮122两侧的闭环链条145上。第三支架170上旋转设置有第三上链轮172和第三下链轮173,闭环链条145从驱动链轮143下方开始,依次绕过第三下链轮173下方、第二上链轮132上方、第一下链轮123下方、第一上链轮122上方、第二下链轮133下方、第三上链轮172上方,再回到驱动链轮143,构成闭环运行机构。
60.在设置有更多级的支架时,各级支架依次上下滑动设置,并依次设置抵接结构。驱
动装置的驱动链轮143设置于最底部的支架,每一级支架均旋转设置有上链轮和下链轮,闭环链条145从驱动链轮143下方开始,依次绕过最底部的支架的下链轮下方、上一级支架的上链轮上方、再上一级支架的下链轮下方、类似方式重复直到绕过第一支架120的第一下链轮123下方、第一上链轮122上方、下一级支架(即第二支架130)的下链轮(即第二下链轮133)下方、再下一级支架(即第三支架170)的上链轮(即第三上链轮172)上方、类似方式重复直到绕过底部的支架的上链轮上方后回到驱动链轮143的下方,构成闭环运行机构。
61.而作为本技术的多联升降装置100的最基本结构,如图17所示,仅需将闭环链条145从驱动装置的驱动链轮143开始,依次绕过第二上链轮132上方、第一下链轮123下方、第一上链轮122上方、再回到驱动链轮143。也就是说可以不设置第二下链轮133。而如图17和图18所示,在仅驱动升降单元110升降时,第一支架120保持不动,使整个装置的重心保持在低位,可提高整个装置的稳定性和运行能耗,也使多联升降装置100可在第一支架120高度范围内操作更重的货物。只有在需要高出第一支架120的货架取放货物时,才需要将第一支架120提升,而且无需再第一支架120上设置重量较大的驱动装置,提高了多联升降装置100的高位取放货物时的稳定性、运载能力和总体工作效率。
62.实施例二。在实施例一的基础上,本实施例说明升降单元110和第一支架120之间的上下滑动结构,以及第一支架120和第二支架130之间的上下滑动结构。如图7所示,第一立柱126具有上下延伸的第一导槽127,第一导槽127位于第一立柱126在第一方向的内侧,即两个第一立柱126的第一导槽127相向设置。如图13所示,第一导向装置150包括若干导向轮,这些导向轮与第一导槽127匹配设置,使第一导向装置150适于在第一导槽127内上下滑动。
63.如图9所示,第二立柱136具有上下延伸的第二导槽138,同时如图5和图6所示,第一立柱126的下部设置有第二导向装置160,第二导向装置160的多个导向轮和第二导槽138匹配设置,从第一方向和垂直于第一方向的第二方向上压合至第二导槽138的侧壁。第一方向和第二方向均为水平方向。如图7所示,第一立柱126的两侧还设置有第三导槽128,同时如图10所示,第二支架130的第二立柱136的上部还设置有第三导向装置180,第三导向装置180的导向轮和第三导槽128匹配设置。第二导向装置160、第三导向装置180分别和第二导槽138和第三导槽128匹配工作,使第一支架120上下滑动时更加稳定。
64.如实施例一中提到,升降单元110和第一支架120之间的滑动设置、第一支架120和第二支架130之间的滑动设置可根据多联升降装置100的具体应用场景选择设置,本实施例为一种优选设置,但并不是本技术的多联升降装置100实现用一条或一组闭环链条145实现升降单元110和第一支架120的联动升降的唯一设置方法。
65.实施例三。在以上实施例的基础上,本实施例说明闭环链条145和升降单元110的一种具体连接方式。如图13和图15所示,升降单元110固定设置有链条张紧装置111,闭环链条145在安装前具有第一端和第二端,第一端和第二端分别固定至链条张紧装置111的上下两端,构成闭环结构。链条张紧装置111设置有若干锁紧螺母、一个双头螺栓或双头螺母,从而适于张紧闭环链条145。
66.作为本实施例的变化方式,也可直接将完整闭合的闭环链条145固定至升降单元110,然后在闭环链条145的运行路径上另设张紧链轮对闭环链条145进行张紧。
67.实施例四。在以上各实施例的基础上,本实施例说明驱动装置的一种优选实施方
式。如图2和图13所示,驱动装置包括减速电机141和中间轴142,减速电机141的输出轴和中间轴142上均固定设置有驱动链轮143,减速电机141的输出轴和中间轴142之间通过传动链条144传动连接;中间轴142通过一个驱动链轮143传动连接至闭环链条145。
68.如图15所示,中间轴142上设置有多个驱动链轮143,分别用于和减速电机141传动连接和用于驱动闭环链条145。通过中间轴142的设置,可便于在多联升降装置100的两侧各设置一套闭环链条145、第一上链轮122、第一下链轮123、第二上链轮132和第二下链轮133等部件,而且驱动装置同步驱动两侧的闭环链条145,使多联升降装置100的运行更加稳定可靠。但用于小型搬运机器人时,也可仅在多联升降装置100的一侧设置闭环链条145等结构,并省去中间轴142、传动链条144等部件,并且只在减速电机141的输出轴上设置一个驱动链轮143来驱动闭环链条145。
69.作为本实施例的变化方式,还可将第二支架130的第二下链轮133直接连接至减速电机141的输出轴,用于驱动闭环链条145。
70.在仅设置第一支架120和第二支架130时,驱动装置的减速电机141等结构固定设置于第二本体131下部的下横梁137上,或者设置在搬运机器人的底盘200上,驱动装置通过驱动链轮143驱动闭环链条145,或者通过其他方式与第二下链轮133双向传动连接,以适于通过第二下链轮133双向驱动闭环链条145,例如通过齿轮传动连接或链轮链条传动连接驱动同轴连接两侧的两个第二下链轮133的另一个中间轴。在设置有第三支架170或者更多级支架时,减速电机141通过驱动链轮143驱动闭环链条145,或者通过其他传动方式与第三下链轮173双向传动连接,或与底部的支架的下链轮双向传动连接,以驱动闭环链条145。
71.实施例五。如图1所示,本实施例为一种搬运机器人,包括前述实施例中的任一种多联升降装置100;多联升降装置100设置于底盘200上,底盘200可为移动平台,使搬运机器人可自主移动。以设置有第一支架120和第二支架130的多联升降装置100为例,第二支架130固定设置于底盘200上,而且第二支架130上还设置有多个暂存货架单元400;即暂存货架单元400通过第二支架130固定连接至底盘200,并且上下间隔设置;升降单元110上固定连接有一货物取放装置300,货物取放装置300适于在任一暂存货架单元400和立式货架之间转存货物。
72.如图16所示,货物取放装置300包括托架310、伸缩叉320和旋转机构330,托架310固定至升降单元110,伸缩叉320适于在水平方向上伸缩并叉取货物,旋转机构330适于驱动伸缩叉320相对于托架310和升降单元110在水平面内旋转。
73.需要从立式货架上取货时,搬运机器人移动至货架附近的合适位置,并在移动过程中同时通过多联升降装置100将货物取放装置300升高至合适高度,旋转机构330驱动伸缩叉320至合适的方向后,伸缩叉320从货架上叉取货物并缩回;搬运机器人将货物降低至合适高度并开始转运货物,或者,旋转机构330驱动伸缩叉320朝向暂存货架单元400,并在升降单元110调整高度后将货物暂存至一个具有空位的暂存货架单元400,然后继续取放货物或转运货物。类似地,搬运机器人也可将伸缩叉320上的货物或者多个暂存货架单元400中的货物放到货架上。
74.上述仅为本技术的较佳实施例及所运用的技术原理,在不脱离本技术构思的情况下,还可以进行各种明显的变化、重新调整和替代。本领域技术人员可由本说明书所揭露的内容轻易地了解本技术的其他优点和功效。本技术还可以通过另外不同的具体实施方式加
以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本技术的精神的情况下进行各种修饰或改变。在不冲突的情况下,以上实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1