一种用于抓取单相和三相电能表的机器人抓手的制作方法
1.本发明涉及机器人抓手技术领域,特别是涉及一种用于抓取单相和三相电能表的机器人抓手。
背景技术:
2.电能表有多种尺寸,不同尺寸之间的电能表需要不同的检定流水线来进行上下料操作,这种操作不仅增加了人工成本,还需要更多地场地来建立不同的流水线,为提升工作效率,往往需要同时对三块单相电能表或者两块三相电能表进行抓取操作,但现有技术中的机器人存在末端抓手快速转换装置定位精度低、接拆不稳定、切换效率较低,同时不能兼容不同数量和尺寸的电能表抓取工作,进行上下料操作的问题。
技术实现要素:
3.发明目的:本发明的目的是提供一种定位精度高、切换效率高、兼容单相电能表与三相电能表抓取工作的用于抓取单相和三相电能表的机器人抓手。
4.技术方案:为实现上述目的,本发明所述的用于抓取单相和三相电能表的机器人抓手,包括手臂、光电检测器,还包括抓手部件,抓手部件设有夹爪结构、用于控制夹爪结构旋转的旋转气缸、固定旋转气缸的旋转气缸安装板、用于与手臂连机的手臂连接板,夹爪结构与旋转气缸分别设置在旋转气缸安装板两侧,旋转气缸安装板固定在手臂连接板上,光电检测器设有三组,固定在旋转气缸安装板的底部。
5.夹爪结构设有:用于抓取电能表的第一单相夹爪、第一三相夹爪、第二三相夹爪,用于固定夹爪的双向夹爪安装板、单向夹爪安装板,用于控制夹爪安装板移动的第一夹爪气缸、第二夹爪气缸、第三夹爪气缸,用于固定夹爪气缸的夹爪气缸固定板。
6.第一单相夹爪、第一三相夹爪、第二三相夹爪均分为单齿的左夹爪、双齿的右夹爪。
7.第一夹爪气缸、第三夹爪气缸分别固定有两组竖直并排放置的双向夹爪安装板,第二夹爪气缸固定有两组竖直并排放置的单向夹爪安装板。
8.第一夹爪气缸外侧、第三夹爪气缸内侧的双向夹爪安装板下端均固定有第一单相夹爪的左夹爪,上端分别固定有第一三相夹爪的左夹爪、第二三相夹爪的左夹爪,第一夹爪气缸内侧、第三夹爪气缸外侧的双向夹爪安装板下端均固定有第一单相夹爪的右夹爪,上端分别固定有第一三相夹爪的右夹爪、第二三相夹爪的右夹爪。
9.第二夹爪气缸上靠近第一夹爪气缸一侧的单向夹爪安装板下端固定有第一单相夹爪的左夹爪,靠近第三夹爪气缸一侧的单向夹爪安装板下端固定有第一单相夹爪的右夹爪。
10.夹爪气缸固定板设有三组分别固定第一夹爪气缸、第二夹爪气缸、第三夹爪气缸的沉孔,第一夹爪气缸、第三夹爪气缸固定在两侧,第二夹爪气缸固定在中心位置。
11.旋转气缸安装板的中心设有大通孔,旋转气缸固定在旋转气缸安装板的一面,旋
转气缸上的旋转盘穿过旋转气缸安装板的中心大通孔到另一面,夹爪结构上的夹爪气缸固定板通过圆柱形连接块固定在旋转盘上。
12.手臂连接板为长方形面板,上表面与手臂固定,下表面的两侧与旋转气缸安装板的上端之间还设有两组用于垂直导向作用的导向轴、轴套,两组导向轴、轴套之间还设有两组缓冲弹簧。
13.有益效果:本发明具有如下优点:1、本发明将第一单相夹爪、第一三相夹爪、第二三相夹爪集成在同一个抓手部件上,通过旋转气缸控制夹爪结构的翻转,切换效率高,从而控制第一单相夹爪、第一三相夹爪、第二三相夹爪的工作状态,满足不同尺寸电能表的抓取工作,实现单相电能表与三相电能表的兼容上下料,减少了上下料机器人抓手部件的数量;
14.2、本发明设置三组光电检测器,用来检测电能表是否被准确的抓取在夹爪内,提高了机器人抓手抓取工作的定位精度;
15.3、本发明用机器人抓手代替人工操作,提高了电能表分拣的稳定性与效率,从而提升了流水线的生产效率;
16.4、本发明通过在夹爪气缸上安装不同形状的夹爪,能够适用于不同产品的抓取工作,提高了设备的实用性;
17.5、手臂连接板与夹爪之间设有缓冲弹簧,能够在电能表位置错误、托盘位置异常等情况下,提供一定的缓冲空间,能够避免机器人由于不能及时保护性停止造成的电能表、夹爪等其他设备的损伤,充分保护夹爪在使用过程中的安全。
附图说明
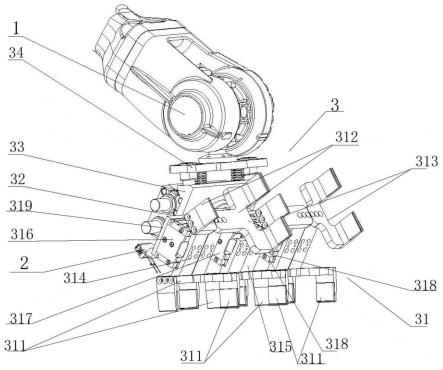
18.图1为本发明的结构示意图;
19.图2为本发明的旋转气缸与旋转气缸安装板、夹爪气缸固定板安装示意图;
20.图3为第一单相夹爪的左夹爪;
21.图4为第一单相夹爪的右夹爪;
22.图5为第一三相夹爪的左夹爪;
23.图6为第一三相夹爪的右夹爪;
24.图7为第二三相夹爪的左夹爪;
25.图8为第二三相夹爪的右夹爪;
26.图9为双向夹爪安装板的结构示意图;
27.图10为单向夹爪安装板的结构示意图;
28.图11为夹爪气缸固定板;
29.图12为旋转气缸的结构示意图;
30.图13为旋转气缸安装板的结构示意图。
具体实施方式
31.下面结合实施例和附图对本发明的技术方案作详细说明。
32.如图1和图2所示,本发明所述的用于抓取单相和三相电能表的机器人抓手,包括手臂1、光电检测器2、抓手部件3,抓手部件3设有夹爪结构31、用于控制夹爪结构31旋转的旋转气缸32、固定旋转气缸32的旋转气缸安装板33、用于与手臂1连机的手臂连接板34,夹
爪结构31与旋转气缸32分别设置在旋转气缸安装板33两侧,旋转气缸安装33板固定在手臂连接板34上,光电检测器2设有三组,固定在旋转气缸安装板33的底部,旋转气缸32能够控制夹爪结构31进行180
°
翻转。
33.夹爪结构31设有用于抓取电能表的第一单相夹爪311、第一三相夹爪312、第二三相夹爪313,用于固定夹爪的双向夹爪安装板314、单向夹爪安装板315,用于控制夹爪安装板移动的第一夹爪气缸316、第二夹爪气缸317、第三夹爪气缸318,用于固定夹爪气缸的夹爪气缸固定板319,其中夹爪气缸内设有电磁阀,可通过机器人编程程序来遥控夹爪气缸,从而控制夹爪安装板的移动,以适应不同尺寸电能表的抓取。
34.如图3至图8所示,第一单相夹爪311、第一三相夹爪312、第二三相夹爪313均分为单齿的左夹爪、双齿的右夹爪,第一单相夹爪311能够抓取单相电能表,第一三相夹爪312、第二三相夹爪313能够抓取三相电能表。
35.第一夹爪气缸316、第三夹爪气缸318分别固定有两组竖直并排放置的双向夹爪安装板314,第二夹爪气缸317固定有两组竖直并排放置的单向夹爪安装板315。
36.如图9和图10所示,第一夹爪气缸316外侧、第三夹爪气缸318内侧的双向夹爪安装板314下端均固定有第一单相夹爪311的左夹爪,上端分别固定有第一三相夹爪312的左夹爪、第二三相夹爪313的左夹爪,第一夹爪气缸316内侧、第三夹爪气缸318外侧的双向夹爪安装板314下端均固定有第一单相夹爪311的右夹爪,上端分别固定有第一三相夹爪312的右夹爪、第二三相夹爪313的右夹爪。
37.第二夹爪气缸317上靠近第一夹爪气缸316一侧的单向夹爪安装板315下端固定有第一单相夹爪311的左夹爪,靠近第三夹爪气缸318一侧的单向夹爪安装板315下端固定有第一单相夹爪311的右夹爪。
38.如图11所示,夹爪气缸固定板319设有三组分别固定第一夹爪气缸316、第二夹爪气缸317、第三夹爪气缸318的沉孔,第一夹爪气缸316、第三夹爪气缸318固定在两侧,第二夹爪气缸317固定在中心位置。
39.如图12和图13所示,旋转气缸安装板33的中心设有大通孔,旋转气缸32固定在旋转气缸安装板33的一面,旋转气缸32上的旋转盘穿过旋转气缸安装板33的中心大通孔到另一面,夹爪结构31上的夹爪气缸固定板319通过圆柱形连接块321固定在旋转盘上。
40.手臂连接板34为长方形面板,上表面与手臂1固定,下表面的两侧与旋转气缸安装板33的上端之间通过两组用于垂直导向作用的导向轴、轴套连接,两组导向轴、轴套之间还设有两组缓冲弹簧,缓冲弹簧的设置能够在电能表位置错误、托盘位置异常等情况下,提供一定的缓冲空间,能够避免机器人由于不能及时保护性停止造成的电能表、夹爪等其他设备的损伤,充分保护夹爪在使用过程中的安全。
41.在具体工作时,先将需要上下料的电能表用载表托盘或者载表周转箱输送至上下料位置,若是单相电能表需要进行上下料,则将机器人抓手调至第一单相夹爪311工作模式,此时第一单相夹爪311朝下,第一三相夹爪312、第二三相夹爪313斜上处于闲置状态,通过机器人编程程序来遥控第一夹爪气缸316、第二夹爪气缸317、第三夹爪气缸318同时动作,完成三块单相电能表的上下料工作,其中三组光电检测器用来检测三块单相电能表是否在第一单相夹爪311的夹爪内。
42.若是三相电能表需要进行上下料,则将机器人抓手调至第一三相夹爪312、第二三
相夹爪313工作模式,此时第一三相夹爪312、第二三相夹爪313朝下,第一单相夹爪311斜上处于闲置状态,通过机器人编程程序来遥控第一夹爪气缸316、第三夹爪气缸318同时动作,完成两块三相电能表的上下料工作,其中两侧的光电检测器用来检测两块三相电能表是否在第一三相夹爪312、第二三相夹爪313的夹爪内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1