一种叉车坡道顶端货物存取控制方法、存储介质及系统与流程
本发明涉及叉车,具体涉及一种叉车坡道顶端货物存取控制方法、存储介质及系统。
背景技术:
1、叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。
2、在中国专利申请cn110282580a公开了一种货叉倾角控制系统,根据倾斜角度、货叉倾角和车体倾角确定货叉的目标角度,再将货叉的角度调整为目标角度,从而准确的调整货叉的角度、进而避免叉入货物、车厢或者托盘等问题。但无法适用于货物水平放置于坡道顶端的情况。
3、1)对于已知坡度的坡道,其仅仅能让叉车驶上坡道,而货物本身是水平的,叉车或叉车agv无法在坡道上顺利将坡道顶端的货物叉起。
4、2)对于未知坡度的坡道,无法再根据坡度来调整货叉的角度,随着货叉靠近坡道,叉车为了避免货叉和坡道碰撞,会进行制动,从而无法存取坡道顶端的货物。
技术实现思路
1、针对上述问题,发明人提供了一种叉车坡道顶端货物存取控制方法、存储介质及系统,在上下坡过程中,实时调整货叉的高度与角度,从而避免了货叉与坡道发生碰撞,实现了未知坡度坡道顶端货物的存取。
2、根据第一方面,本发明提供了一种叉车坡道顶端货物存取方法,包括:
3、步骤1:实时获取车身倾角、货叉倾角和货叉前端与地面的间距;
4、步骤2:根据车身倾角变化量和货叉前端与地面的间距实时上升/下降货叉,使货叉前端与地面的间距始终不小于最小高度阈值;
5、同时,根据货叉倾角实时调整货叉的角度,使货叉保持与水平地面平行的状态。
6、进一步地,所述步骤2包括:
7、实时获取货叉后端与地面的间距;
8、货叉进入坡道阶段:当货叉后端与地面的间距不变,货叉前端与地面的间距逐渐减小时,货叉进入坡道,根据货叉前端与地面的间距实时上升货叉,使货叉前端与地面的间距始终不小于最小高度阈值;
9、车身部分进入坡道阶段:当车身倾角逐渐增大,车身部分进入坡道,此时根据车身倾角变化量和货叉前端与地面的间距实时上升货叉;
10、同时,根据货叉倾角实时调整货叉的角度,使货叉保持与水平地面平行的状态;
11、车身完全进入坡道阶段:当车身倾角不再增大时,车身完全进入坡道,此时根据货叉前端与地面的间距实时上升货叉,使货叉前端与地面的间距始终不小于最小高度阈值;
12、存取货物后,车身逐渐后退,此时根据货叉前端与地面的间距实时下降货叉,同时保证货叉前端与地面的间距始终不小于最小高度阈值;
13、车身部分退出坡道阶段:当车身倾角逐渐减小,车身部分退出坡道,此时根据车身倾角变化量和货叉前端与地面的间距实时下降货叉;
14、同时,根据货叉倾角实时调整货叉的角度,使货叉保持与水平地面平行的状态;
15、车身完全退出坡道阶段:当车身倾角不再减小,车身完全退出坡道,此时根据货叉前端与地面的间距实时下降货叉,同时保证货叉前端与地面的间距始终不小于最小高度阈值。
16、进一步地,设车身部分进入坡道阶段中货叉上升量或车身部分退出坡道阶段货叉下降量为δ,则有:
17、δ=l*sinδβ
18、其中,l为货叉长度,δβ为车身倾角变化量。
19、进一步地,在叉车/叉车agv取集装箱中的货物时,所述方法还包括:
20、叉车/叉车agv在坡道顶端取货时,获取货叉与集装箱顶部的距离和货物的高度;
21、根据货叉与集装箱顶部的距离和货物的高度确定货叉将货物抬起的抬升高度;
22、根据抬升高度控制货叉抬升。
23、根据第二方面,本发明又提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序能够被处理器执行以实现如上所述方法的步骤。
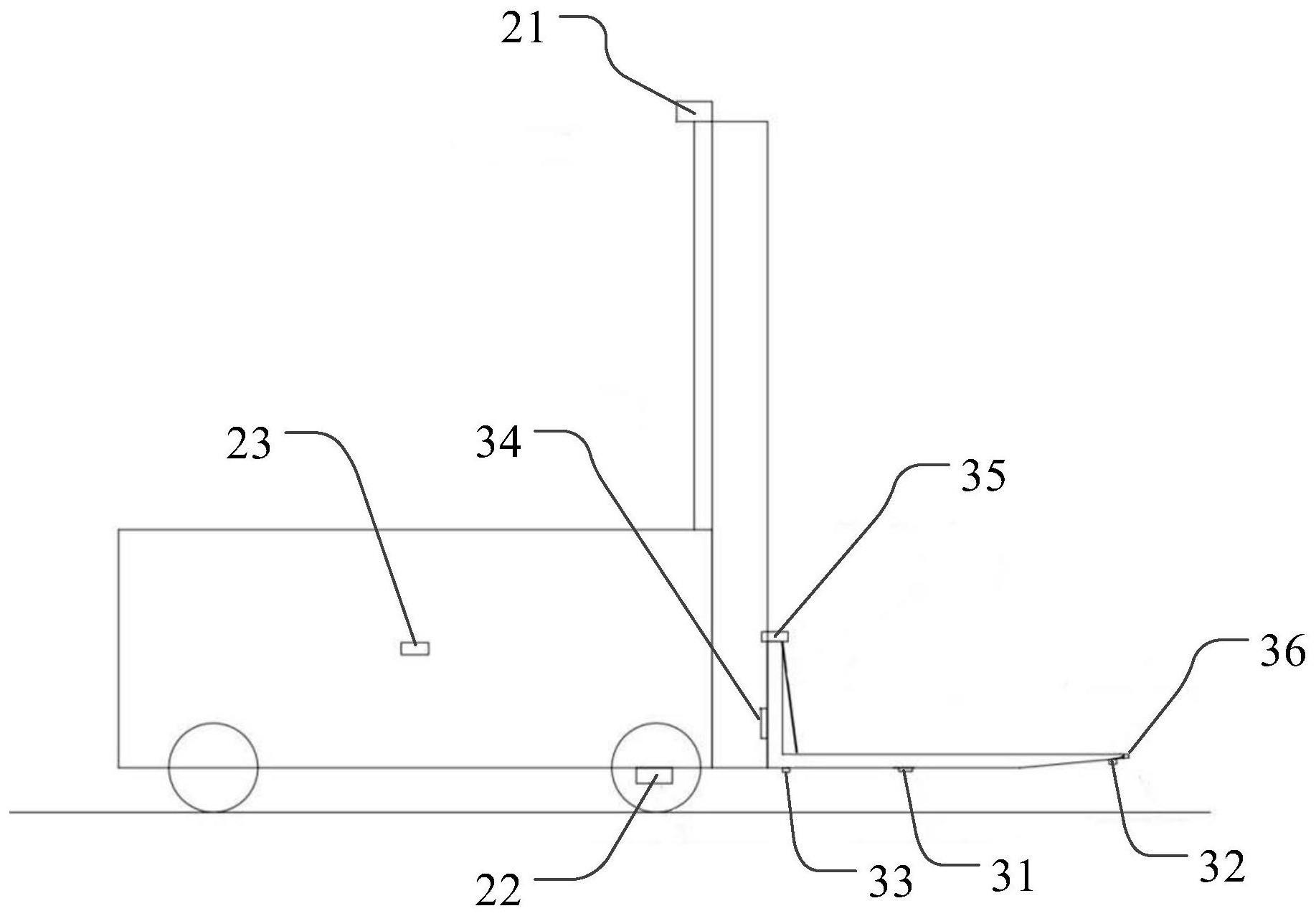
24、根据第三方面,本发明还提供了一种叉车坡道顶端货物存取控制系统,包括:
25、车身倾角检测仪,用于检测车身倾角;
26、货叉倾角检测仪,用于检测货叉倾角;
27、第一高度检测仪,设于货叉前端,用于检测货叉前端与地面的间距;
28、控制器,包括如上所述的计算机可读存储介质,用于根据车身倾角变化量和货叉前端与地面的间距实时上升/下降货叉,使货叉前端与地面的间距始终不小于最小高度阈值;还用于根据货叉倾角实时调整货叉的角度,使货叉保持与水平地面平行的状态。
29、进一步地,该系统还包括:
30、第二高度检测仪,设于货叉后端,用于检测货叉后端与地面的间距;
31、所述控制器还用于根据货叉后端与地面的间距和货叉前端与地面的间距判断货叉是否进入坡道。
32、进一步地,该系统还包括:
33、顶部空间检测仪,设于货叉上,用于检测取货时货叉与集装箱顶部的距离;
34、所述控制器还用于根据货叉与集装箱顶部的距离和货物的高度确定货叉将货物抬起的抬升高度,并根据抬升高度控制货叉抬升。
35、进一步地,该系统还包括:
36、货叉行程检测仪,用于检测货叉上升/下降是否到位。
37、与现有技术相比,本发明的有益效果:
38、(1)通过实时调整货叉的高度和角度,实现了未知坡度坡道顶端的货物的存取。
39、(2)有效避免了叉车在上下坡过程中货叉出现碰撞坡道的问题。
40、(3)实现了叉车在行驶过货叉的自动调整,可适应不同倾角的坡道,能满足叉车在坡道上存取坡道顶端货物的需求。
技术特征:
1.一种叉车坡道顶端货物存取方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述步骤2包括:
3.如权利要求2所述的方法,其特征在于,设车身部分进入坡道阶段中货叉上升量或车身部分退出坡道阶段货叉下降量为δ,则有:
4.如权利要求1所述的方法,其特征在于,在叉车/叉车agv取集装箱中的货物时,所述方法还包括:
5.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序能够被处理器执行以实现如权利要求1-4中任一项所述方法的步骤。
6.一种叉车坡道顶端货物存取控制系统,其特征在于,包括:
7.如权利要求6所述的系统,其特征在于,还包括:
8.如权利要求6所述的系统,其特征在于,还包括:
9.如权利要求6所述的系统,其特征在于,还包括:
技术总结
本发明公开了一种叉车坡道顶端货物存取控制方法、存储介质及系统,方法包括:实时获取车身倾角、货叉倾角和货叉前端与地面的间距;根据车身倾角变化量和货叉前端与地面的间距实时上升/下降货叉,使货叉前端与地面的间距始终不小于最小高度阈值;同时,根据货叉倾角实时调整货叉的角度,使货叉保持与水平地面平行的状态;本发明通过对货叉高度和角度的动态调整,可适应不同倾角的坡道,避免了叉车在上下坡过程中货叉出现碰撞坡道的情况,能满足叉车在坡道上存取坡道顶端货物的需求。
技术研发人员:时吕,易黄懿,张帮荣,杨维国,卫津民,刘彭飞,符鹏锟,安耘,唐艳英,自校男
受保护的技术使用者:云南昆船智能装备有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!