紧密型输送装置及方法与流程
本发明属于产品输送存储,具体涉及一种紧密型输送装置及方法。
背景技术:
1、产品在智能化出入库和盘库时,需要根据同批号放一起,接近有效期放外面原则进行存储,因此会在产品外包装上贴上条码,以便可以通过自动扫描获取产品信息,然后将产品通过输送带输送至到指定的多层多列的输送带库位机构。
2、然而,在产品的输送过程中,当产品与产品紧贴在一起输送,激光对射传感器无法判断单个产品的输送是否完成。为了解决这一问题,现在采用的方案是在产品进行输送前,先对各个产品分离,存储时也将产品间隔存放,这样方便使用激光对射传感器对单个产品输送完成进行判断。但这样的输送和存储方式浪费空间,不仅会降低输送效率,还会浪费库容量。
3、因此,针对上述技术问题,有必要提供一种紧密型输送装置及方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种紧密型输送装置及方法。
2、为了实现上述目的,本发明一实施例提供的技术方案如下:
3、一种紧密型输送装置,所述紧密型输送装置包括:
4、库外机构,用于输送产品;
5、若干库位机构,用于收容产品;
6、机械臂机构,所述机械臂机构于第一状态下与库外机构对接,以将产品从库外机构输送至机械臂机构上,于第二状态下,与库位机构对接,以将产品从机械臂机构输送至库位机构上。
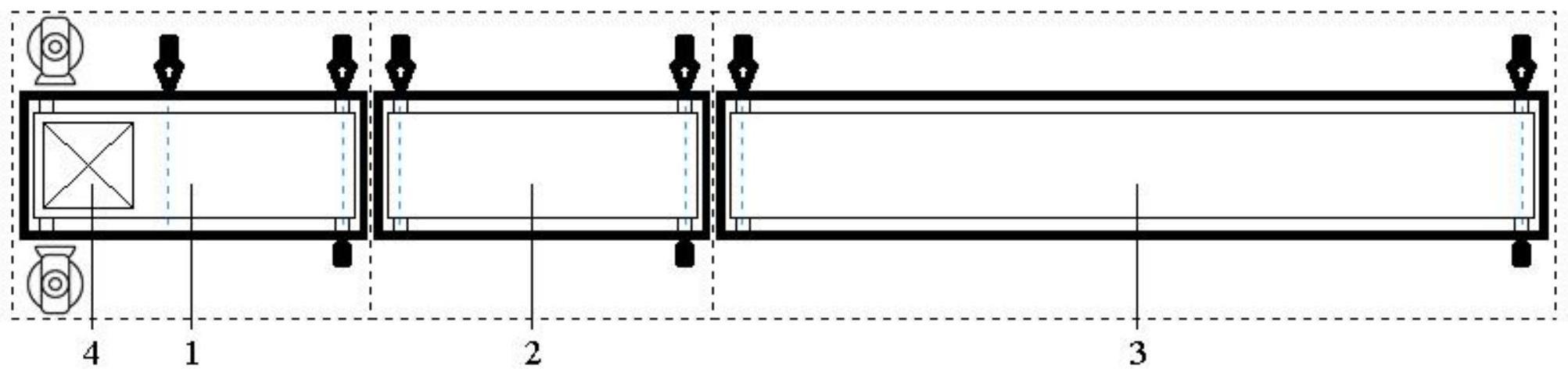
7、一实施例中,所述库外机构包括第一输送带和用于驱动第一输送带的第一电机;所述机械臂机构包括第二输送带和用于驱动第二输送带的第二电机;所述库位机构包括第三输送带和用于驱动第三输送带的第三电机。
8、一实施例中,所述库外机构包括位于第一输送带首端的第一位置传感器;
9、所述机械臂机构包括位于第二输送带末端的第二位置传感器和位于第二输送带首端的第三位置传感器;
10、所述库位机构包括位于第三输送带末端的第四位置传感器和位于第三输送带首端的第五位置传感器。
11、一实施例中,所述库外机构还包括位于所述第一输送带首端和所述第一输送带末端之间的长度传感器。
12、一实施例中,所述库外机构还包括位于所述第一输送带末端的图像识别装置。
13、本发明另一实施例提供的技术方案如下:
14、一种紧密型输送方法,所述方法包括以下步骤:
15、s1、驱动机械臂机构以使其与库外机构对接;
16、s2、将产品从库外机构输送至机械臂机构上;
17、s3、驱动机械臂机构以使其和库外机构分离后与目标库位机构对接;
18、s4、将产品从机械臂机构输送至目标库位机构上。
19、一实施例中,所述方法还包括:通过长度传感器测量向机械臂机构输送的产品的长度l1。
20、一实施例中,所述步骤s2包括:
21、s21、通过第一电机驱动第一输送带以额定速度传动,以将产品在第一输送带输送;
22、s22、计算可放置产品的第二输送带长度l2并将l2与l1对比,若l2大于或等于l1,则控制第一输送带以额定速度继续传动,以将产品从第一输送带向第二输送带输送,若l2小于l1,则关闭第一电机,第一输送带停止传动;
23、s23、判断机械臂机构第二位置传感器是否检测到产品,若是,则通过第二电机驱动第二输送带以额定速度传动;
24、s24、判断库外机构第一位置传感器是否检测到产品,若否,则关闭第一电机,第一输送带停止传动,若是,则控制第一输送带以额定速度继续传动;
25、s25、判断机械臂机构第二位置传感器是否检测到产品,若否,则关闭第二电机,第二输送带停止传动,若是,则控制第二输送带以额定速度继续传动;
26、s26、重复步骤s21至s25。
27、一实施例中,所述步骤s4包括:
28、s41、通过第二电机驱动第二输送带以额定速度传动,以将产品第二输送带输送;
29、s42、计算可放置产品的第三输送带长度l3并将l3与l1对比,若l3大于或等于l1,则控制第二输送带以额定速度继续传动,以将产品从第二输送带向第三输送带输送,若l3小于l1,则关闭第二电机,第二输送带停止传动;
30、s43、判断库位机构第四位置传感器是否检测到产品,若是,则通过第三电机驱动第三输送带以额定速度传动;
31、s44、判断第二输送带的传动长度是否达到预设长度阈值,若是,则关闭第二电机,第二输送带停止传动,若否,则控制第二输送带以额定速度继续传动;
32、s45、判断库位机构第四位置传感器是否检测到产品,若否,则关闭第三电机,第三输送带停止传动,若是,则控制第三输送带以额定速度继续传动;
33、s46、判断机械臂机构第三位置传感器是否检测到产品,若是,则控制第二输送带以额定速度反向传动,若否,则关闭第二电机,第二输送带停止传动;
34、s47、重复步骤s41至s46。
35、一实施例中,所述方法还包括:通过图像识别装置,识别产品信息。
36、本发明具有以下有益效果:
37、本发明提供一种紧密型输送装置,通过机械臂机构将库外机构上的产品运输至若干库位机构中的目标库位机构,可快速有序地实现智能化存储收纳产品,提高输送和存储的效率;
38、本发明提供一种紧密型输送方法,通过机械臂机构将库外机构上的产品输送至指定目标库位机构,并且两相邻产品可紧贴在一起,能节省空间,提高第三输送带的利用率,提高产品的输送效率,增大了库位存储容量。
技术特征:
1.一种紧密型输送装置,其特征在于,所述紧密型输送装置包括:
2.根据权利要求1所述的紧密型输送装置,其特征在于,所述库外机构包括第一输送带和用于驱动第一输送带的第一电机;所述机械臂机构包括第二输送带和用于驱动第二输送带的第二电机;所述库位机构包括第三输送带和用于驱动第三输送带的第三电机。
3.根据权利要求2所述的紧密型输送装置,其特征在于,所述库外机构包括位于第一输送带首端的第一位置传感器;
4.根据权利要求2所述的紧密型输送装置,其特征在于,所述库外机构还包括位于所述第一输送带首端和所述第一输送带末端之间的长度传感器。
5.根据权利要求2所述的紧密型输送装置,其特征在于,所述库外机构还包括位于所述第一输送带末端的图像识别装置。
6.一种紧密型输送方法,其特征在于,所述方法包括以下步骤:
7.根据权利要求6所述的紧密型输送方法,其特征在于,所述方法还包括:通过长度传感器测量向机械臂机构输送的产品的长度l1。
8.根据权利要求7所述的紧密型输送方法,其特征在于,所述步骤s2包括:
9.根据权利要求7所述的紧密型输送方法,其特征在于,所述步骤s4包括:
10.根据权利要求6所述的紧密型输送方法,其特征在于,所述方法还包括:通过图像识别装置,识别产品信息。
技术总结
本发明公开了一种紧密型输送装置,包括:库外机构,用于输送产品;若干库位机构,用于收容产品;机械臂机构,机械臂机构于第一状态下与库外机构对接,以将产品从库外机构输送至机械臂机构上,于第二状态下,与库位机构对接,以将产品从机械臂机构输送至库位机构上。本发明提供一种紧密型输送装置,通过机械臂机构将库外机构上的产品运输至若干库位机构中的目标库位机构,可快速有序地实现智能化存储收纳产品,提高输送和存储的效率。
技术研发人员:赵云,钱凯,赵青
受保护的技术使用者:江苏池丰科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!