一种磁块自动码盒堆垛装置的制作方法
1.本发明涉及磁性产品生产设备技术领域,具体涉及一种磁块码垛装置。
背景技术:
2.钐钴磁粉或者钕铁硼磁粉经过粉末成型压机压制为磁块,将磁块送入烧结炉中烧结可以得到磁材毛坯,再将磁材毛坯进行加工就能得到磁性产品。经粉末成型压机压制好的磁块表面会粘有一些粉末,在磁块进入烧结炉之前需要清除掉,否则会影响烧结后的磁材毛坯的性能和合格率。目前一般是在粉末成型压机的出料端设置一个手套箱,由工作人员将手伸入手套箱通过毛刷将磁块表面的粉末清刷干净。但是人工拿取磁块、以及在用毛刷清刷磁块时会对磁块表面造成磨损,从而会影响烧结后磁材毛坯的成品合格率。
3.此外,钐钴磁粉或钕铁硼磁粉在空气中极易氧化自燃,而磁块表面完全或者不完全氧化都将使烧结后的最终产品整体或者部分不合格从而使该磁块报废,因此在生产和运输磁块过程中需避免磁块与空气接触。目前批量运输和生产磁块一般采用全人工的方式或者利用半自动化设备的方式,这两种方式都需要人工介入,不仅容易导致磁块与空气接触、发生氧化,而且受人工熟练度等人为因素的影响较大,会导致生产过程步骤繁多、生产效率较低。
技术实现要素:
4.因此,本发明要解决的技术问题在于克服现有技术中磁块的生产和运输,容易造成磁块表面磨损和磁块氧化,受人为因素影响较大、生产效率较低的缺陷,从而提供一种自动化程度高、生产效率较高、能提升磁块成品率的磁块码垛装置。
5.为此,本发明提供了一种磁块码垛装置,,包括:密封壳体以及设置于所述密封壳体内的至少一组送盒机构、至少一组码盒机构、运输机构和码垛机构;
6.所述送盒机构,其送盒机构物料输出端与码盒机构物料码放端连接,所述送盒机构用于将空盒体运送至所述码盒机构物料码放端;
7.所述码盒机构,其码盒机构物料输入端与粉末成型压机物料输出端相连接,所述码盒机构用于将所述粉末成型压机物料输出端输出的磁块码放至所述空盒体内,所述码盒机构物料码放端设置有消磁组件,所述消磁组件用于消除所述磁块表面的剩磁;
8.所述运输机构包括第一运输组件,第一运输组件物料输入端与所述码盒机构物料码放端连接,第一运输组件物料输出端与码垛机构物料输入端连接,所述第一运输组件用于将所述码盒机构物料码放端码放有所述磁块的盒体运输至所述码垛机构物料输入端;
9.所述码垛机构,用于码垛所述第一运输组件物料输出端输送的所述盒体。
10.可选的,所述码盒机构包括:送料组件、磁块放置组件和第一夹取组件,送料组件物料输入端为所述码盒机构物料输入端,所述磁块放置组件设置于所述送料组件与所述消磁组件之间,所述第一夹取组件设置于所述磁块放置组件上方,所述送料组件用于将所述磁块放置于所述磁块放置组件上,所述第一夹取组件用于将所述磁块码放至所述码盒机构
物料码放端的所述空盒体内。
11.可选的,所述运输机构还包括第二运输组件,所述送盒机构通过所述第二运输组件将所述空盒体运送至所述码盒机构物料码放端。
12.可选的,所述送盒机构包括:第一升降平台、第一升降驱动结构和第一递送结构,所述第一升降驱动结构与所述密封壳体固定连接,第一升降驱动结构动力输出端与所述第一升降平台相连接,所述第一递送结构设置于所述第一升降平台的上方,用于将所述第一升降平台上放置的所述空盒体送至所述第二运输组件上。
13.可选的,所述码垛机构包括:平台、平台升降结构、平台升降驱动结构、伸缩结构和第二夹取结构,平台升降驱动结构动力输出端与平台升降结构相连接,所述平台与所述平台升降结构相连接,所述伸缩结构设置于所述平台上,所述第二夹取结构设置于所述平台上方;所述平台升降结构用于带动所述平台沿所述平台升降结构的高度方向升降,所述第二夹取结构用于将所述第一运输组件物料输出端输送的所述盒体码垛至所述伸缩结构上。
14.可选的,还包括导向结构,所述导向结构包括至少两个导向杆,所述导向杆的轴向与所述平台升降结构的高度方向平行,所述导向杆一端与所述密封壳体固定连接,所述平台与所述导向杆滑动连接,至少两个所述导向杆对称设置于所述平台两侧。
15.可选的,所述运输机构还包括运输小车,运输小车物料输入口与码垛机构物料输出端相连接,所述运输小车用于将所述伸缩结构上码垛的所述盒体运输至烧结炉。
16.可选的,所述码垛机构与所述运输小车的连接处设置有密封结构。
17.可选的,磁块码垛装置还包括送盖机构,所述送盖机构设置于所述第一运输组件的一侧,所述送盖机构包括:第二升降平台和第二升降驱动结构,所述第二升降驱动结构与所述密封壳体固定连接,第二升降驱动结构动力输出端与所述第二升降平台相连接。
18.可选的,磁块码垛装置还包括设置于所述送盖机构上方的扣盖机构,所述扣盖机构包括吸盖结构和移动结构,所述移动结构的一端与所述吸盖结构连接,所述吸盖结构用于吸取所述第二升降平台上放置的盒盖,所述扣盖机构用于将所述第二升降平台上的所述盒盖盖在所述第一运输组件上的所述盒体上。
19.本发明具有以下优点:
20.1、本发明提供的磁块码垛装置,包括密封壳体和设置在密封壳体内的至少一组送盒机构、至少一组码盒机构、运输机构和码垛机构,通过送盒机构将空盒体送至码盒机构的码盒机构物料码放端,码盒机构将粉末成型压机物料输出端的磁块码放至空盒体内,再通过运输机构中的第一运输组件将码放有磁块的盒体送至码垛机构,通过码垛机构将盒体一一码放整齐。磁块的装盒以及盒体码垛等工序均完全实现了自动化,完全不需要人工去干预和操作,生产效率较高,并且由于各个机构都是设置在密封壳体内的,不会与空气接触,避免了磁块接触空气发生氧化,提高了磁块的成品率。此外,码盒机构的码盒机构物料码放端设置有消磁组件,通过消磁组件将磁块表面消磁,使磁块表面粘有的粉末掉落,无需人工通过毛刷去清刷磁块表面去除粉末,以免损伤磁块表面,进一步提高磁块的成品率。
21.2、本发明提供的磁块码垛装置,码盒机构包括送料组件、磁块放置组件和第一夹取组件,通过送料组件将粉末成型压机物料输出端的磁块送至磁块放置组件上,并且由设置在送料组件和磁块放置组件之间消磁组件对磁块进行表面消磁,最后通过第一夹取组件将磁块从磁块放置组件上码放至空盒体内。通过码盒组件将磁块从粉末成型压机物料输出
端码放至空盒体内,并且通过消磁组件完成了磁块表面的清刷工作,各个组件布置位置及布置顺序合理,大大提高了工作效率。
22.3、本发明提供的磁块码垛装置,码垛机构包括:平台、平台升降结构、平台升降驱动结构、伸缩结构和第二夹取结构,通过平台升降驱动结构驱动平台升降结构以带动平台可以升降,进而可以调节设置于平台上的伸缩结构的高度,第二夹取结构可以将盒体码放至伸缩结构上。由于伸缩结构的高度可调,第二夹取结构可以在伸缩结构上码放多层盒体,使得伸缩结构上可以容纳更多的盒体,提高了码垛效率。
23.4、本发明提供的磁块码垛装置,在码垛机构与运输小车的连接处设置有密封结构,避免伸缩结构在将盒体放置在运输小车时,空气从码垛机构与运输小车的连接处进入磁块码垛装置内,使磁块不易氧化,提高最终产品的成品率。
24.5、本发明提供的磁块码垛装置,还包括送盖机构和扣盖机构,当盒体在第一运输组件上运输时,通过送盖组件将盒盖运输至扣盖机构处,再通过扣盖机构将盒盖盖在盒体上。通过送盖机构和扣盖机构可以将盒盖盖在盒体上,提高了盒体的密封性,且在后续码垛盒体时,可以对放置在盒体的磁块起到一定的保护作用,防止磁块表面被划伤或者被挤压而造成损坏。
附图说明
25.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
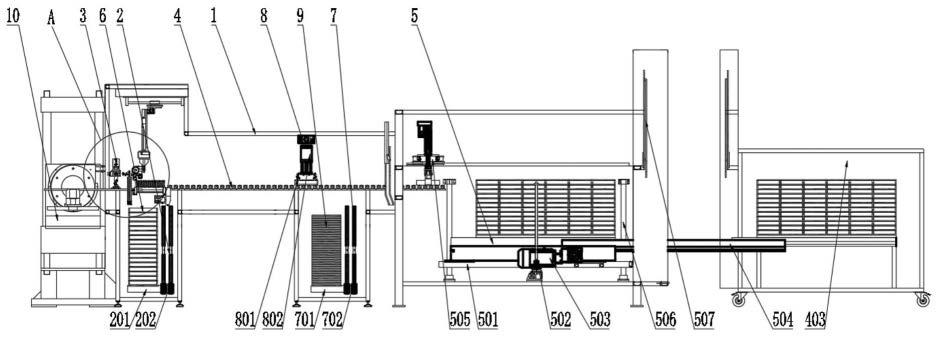
26.图1为本发明磁块码垛装置的示意图;
27.图2为本发明磁块码垛装置的俯视图;
28.图3为图1中a部分的放大示意图;
29.图4为本发明磁块码垛装置中码垛机构的示意图;
30.图5为本发明磁块码垛装置中空盒体的示意图;
31.图6为本发明磁块码垛装置中盒盖的示意图。
32.附图标记说明:
33.1、密封壳体;
34.2、送盒机构,201、第一升降平台,202、第一升降驱动结构,203、第一递送结构;
35.3、码盒机构,301、消磁组件,302、送料组件,303、磁块放置组件,304、第一夹取组件;
36.4、运输机构,401、第一运输组件,402、第二运输组件,403、运输小车,404、转动组件;
37.5、码垛机构,501、平台,502、平台升降结构,5021、丝杠升降装置,503、平台升降驱动结构,5031、电机,5032、第一t系列型螺旋伞齿转向箱,5033、第二t系列型螺旋伞齿转向箱,5034、联轴器,5035、传动轴,504、伸缩结构,505、第二夹取结构,506、导向结构,5061、导向杆,507、密封结构;
38.6、空盒体;
39.7、送盖机构,701、第二升降平台,702、第二升降驱动结构;
40.8、扣盖机构,801、吸盖结构,802、移动结构;
41.9、盒盖;
42.10、粉末成型压机。
具体实施方式
43.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
45.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
46.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
47.如图1所示,为本发明磁块码垛装置的优选实施例,这种磁块码垛装置可以将粉末成型压机10压制好的磁块码垛,之后运输至烧结炉。本实施例磁块码垛装置的自动化程度较高、生产效率较高、可以提升磁块的成品率。
48.上述磁块码垛装置包括:密封壳体1以及设置于密封壳体1内的至少一组送盒机构2、至少一组码盒机构3、运输机构4和码垛机构5。密封壳体1与粉末成型压机10相连接,且二者的连接处密封。密封壳体1可以使内部的各个机构与外界空气隔绝,使内部的各个机构处于密闭的工作环境中,防止磁块与空气接触氧化。此外,正常工作条件下,密封壳体1内部充入惰性气体或氮气,使防氧化的效果更佳。
49.送盒机构2的送盒机构输出端与码盒机构物料码放端连接,用于将空盒体6运送至码盒机构物料码放端。进一步的,送盒机构2通过运输机构4中的第二运输组件402将空盒体6运输至码盒机构物料码放端。送盒机构2设置于第二运输组件402的一侧。送盒机构2包括:第一升降平台201、第一升降驱动结构202和第一递送结构203,第一升降驱动结构202与密封壳体1固定连接,第一升降驱动结构动力输出端与第一升降平台201相连接,第一递送结构203设置于第一升降平台201的上方,用于将第一升降平台201上放置的空盒体6送至运输机构4中的第二运输组件402上。
50.具体的,本实施例中第一升降驱动结构202包括电机和丝杠螺母机构,丝杠设置在密封壳体1上。螺母与丝杠配合连接,且螺母与第一升降平台201固定连接。开启电机驱动丝杠螺母机构运作,丝杠转动带动螺母上下运动,从而带动第一升降平台201沿丝杠的轴向升
降。第一升降平台201上放置有多个排列好的空盒体6,。第一递送结构203采用三轴机械手,可以沿三个方向运动。通过三轴机械手将空盒体6夹取并放置于第二运输组件402上。此外,由于第一升降平台201上的空盒体6需要人工去放置,因此在密封壳体1靠近的第一升降平台201一侧设置有密封门,当第一升降平台201上的空盒体6用完后,工作人员可以通过密封门补充空盒体,将空盒体6放置于第一升降平台201上。通过设置密封门保证了密封壳体1内的封闭,防止磁块与空气接触而氧化。
51.本实施例中,空盒体6优选为石墨盒,且石墨盒的顶部具有凹槽,底部为凸台结构,凸台可与凹槽卡接配合,便于多个石墨盒叠放在一起,而且凸台与凹槽配合既能使石墨盒叠放的更加稳定,还具有一定的密封作用。
52.进一步的,第二运输组件402为辊道,第二运输组件402一端与码盒机构物料码放端相连接,另一端与第一运输组件物料输入端相连接。第二运输组件402可以将空盒体6运送至码盒机构物料码放端,并且当码盒机构物料码放端码放好磁块后,可以将装满磁块的盒体运送至第一运输组件物料输入端。
53.码盒机构3的码盒机构物料输入端与粉末成型压机物料输出端相连接,码盒机构3用于将粉末成型压机物料输出端输出的磁块码放至空盒体6内。进一步的,码盒机构3包括:消磁组件301、送料组件302、磁块放置组件303和第一夹取组件304。送料组件物料输入端即为码盒机构物料输入端,与粉末成型压机物料输出端相连接,用于将磁块放置于磁块放置组件303上。消磁组件301设置于码盒机构物料码放端处,用于消除磁块表面的剩磁,当磁块的剩磁被消除后,磁块残留或者吸附的粉末就会掉落,实现了磁块表面的清除工作,与传统的工作人员通过毛刷去清刷磁块表面除去粉末的方式相比,不会对磁块造成任何损伤,而且效率较高。磁块放置组件303设置于送料组件302与消磁组件301之间。第一夹取组件304设置于磁块放置组件303上方,用于将放置于磁块放置组件303上的磁块码放至空盒体6内。本实施例中,第一夹取组件304优选为三轴机械手,可以沿三个方向自由运动,其夹取端设置有卡爪,并且在卡爪内壁设置有缓冲垫,从而在夹取磁块时不会损伤磁块表面。
54.本实施例中设置有两组送盒机构2和两组码盒机构3,两组送盒机构2和两组码盒机构3设置于第一运输组件401的两侧。对应的两组码盒机构3与两个粉末成型压机10分别对应连接,且每组送盒机构2和码盒机构3之间均设置有第二运输组件402,两组第二运输组件402均与第一运输组件401相连通。
55.运输机构4中的第一运输组件401用于将码盒机构物料码放端码放有磁块的盒体运输至码垛机构物料输入端,其第一运输组件物料输入端与码盒机构物料码放端连接,第一运输组件物料输出端与码垛机构物料输入端连接。具体的,第一运输组件401为辊道,且第一运输组件401的输送方向与第二运输组件402的运输方向相垂直,为便于第一运输组件401上的盒体能运输至第二运输组件402上,第一运输组件401中靠近第二运输组件402一端的若干个辊子下方设置有转动组件404,通过转动组件404可以改变第一运输组件401端部若干辊子的运输方向。当需要接收第二运输组件402上运送来的盒体时,通过转动组件404使端部若干辊子转动90度,从而其运输方向与第二运输组件402的运输方向一致,可以将盒体从第二运输组件402顺利运送到第一运输组件401端部的若干辊子上来,之后再朝相反方向转动90度,使端部若干辊子的运输方向与第一运输组件401的其他辊子的运输方向一致,即可将盒体运送至码垛机构物料输入端。
56.在第一运输组件401的一侧设置有送盖机构7和扣盖机构8。送盖机构7用于运送盒盖9至扣盖机构8处,送盖机构7包括:第二升降平台701和第二升降驱动结构702,第二升降驱动结构702与密封壳体1固定连接,第二升降驱动结构动力输出端与第二升降平台701相连接。具体的,第二升降驱动结构702与第一升降驱动结构202结构相同,第二升降驱动结构702也包括电机和丝杠螺母机构,丝杠设置在密封壳体1上。螺母与丝杠配合连接,且螺母与第二升降平台701固定连接。电机驱动丝杠螺母机构运作,丝杠转动带动螺母上下运动,从而带动第二升降平台701沿丝杠的轴向升降。第二升降平台701上放置有盒盖9,由于本实施例中空盒体6采用的石墨盒,对应的盒盖采用的是石墨盒盖。石墨盒盖同样为凸台结构,可与石墨盒上的凹槽卡接,从而可以紧密的扣在石墨盒上。
57.扣盖机构8设置于送盖机构7上方,用于将第二升降平台701上的盒盖9盖在第一运输组件401上的盒体上,扣盖机构8包括吸盖结构801和移动结构802,移动结构802的一端与吸盖结构801连接,吸盖结构801用于吸取第二升降平台701上放置的盒盖9,移动结构802用于带动吸盖结构801移动。具体的,吸盖结构801为吸盘,移动结构802为无杆气缸,移动结构802可以带动吸盖结构801沿丝杠轴向移动,以及沿垂直于第一运输组件401的运输方向移动。
58.在扣盖时,首先移动结构802带动吸盖结构801向下移动,然后从第二升降平台701上吸取盒盖9,之后向上运动,再水平移动至第一运输组件401上的盒体上方,然后向下运动,当吸盘位于靠近盒体上方时松开盒盖9,即可将盒盖9盖在盒体上。
59.此外,由于第二升降平台701上的盒盖9也需要人工去放置,因此在密封壳体1靠近第二升降平台701的一侧同样设置有密封门,当第二升降平台701上的盒盖9用完后,工作人员可以通过密封门补充盒盖9,将盒盖9放置于第二升降平台701上。
60.码垛机构5与第一运输组件物料输出端相连接,用于码垛第一运输组件物料输出端输送的盒体。码垛机构5包括:平台501、平台升降结构502、平台升降驱动结构503、伸缩结构504和第二夹取结构505。平台升降驱动结构动力输出端与平台升降结构502相连接,平台501与平台升降结构502相连接,伸缩结构504设置于平台501上,第二夹取结构505设置于平台501上方。平台升降驱动结构503用于驱动平台升降结构502运作,使平台升降结构502可以带动平台501沿平台升降结构502的高度方向升降。第二夹取结构505用于将第一运输组件物料输出端输送的盒体码垛至伸缩结构504上。
61.进一步的,平台升降驱动结构503包括:电机5031、第一t系列型螺旋伞齿转向箱5032和两个第二t系列型螺旋伞齿转向箱5033。电机5031的输出轴与第一t系列型螺旋伞齿转向箱5032的输入轴相连接,第一t系列型螺旋伞齿转向箱5032的两个输出轴通过传动轴5035和联轴器5034分别与两个第二t系列型螺旋伞齿转向箱5033的输入轴连接,两个第二t系列型螺旋伞齿转向箱5033的输出轴与平台升降结构502相连接,且第二t系列型螺旋伞齿转向箱5033的输出轴轴向与平台501的升降方向平行。
62.平台升降结构502包括两组丝杠升降装置5021,两组丝杠升降装置5021对称设置于平台501的两侧,且两组丝杠升降装置5021分别通过联轴器5034与两个第二t系列型螺旋伞齿转向箱5033的输出轴相连接。
63.第二夹取结构505优选为机械手,可以将第一运输组件物料输出端运送的盒体夹取至伸缩结构504上。伸缩结构504优选为伸缩插架,可以沿垂直于平台升降结构502高度方
向的方向移动并将码放好的盒体运走。
64.码垛机构5还包括导向结构506,导向结构506包括至少两个导向杆5061,导向杆5061的轴向与平台升降结构502的高度方向平行,导向杆5061的一端与密封壳体1固定连接。平台501与导向杆5061滑动连接,且至少两个导向杆5061对称设置于平台501两侧。具体的,本实施例中导向结构506包括四个导向杆5061,四个导向杆5061设置于平台501的四个边角处,并通过铜套与平台501滑动连接。
65.在平台升降结构502和导向结构506的作用下,平台501以及设置于平台501上的伸缩结构504沿平台升降结构502的高度方向升降,第二夹取结构505夹取盒体后码放至伸缩结构504上,当铺满一层后,伸缩结构504下降,第二夹取结构505开始码放第二层盒体,直至将盒体都码放至伸缩结构504上。
66.运输机构4还包括运输小车403,运输小车物料输入口与码垛机构物料输出端相连接,运输小车403用于将伸缩结构504上码垛的盒体运输至烧结炉。具体的,当伸缩结构504上的盒体码放好以后,运输小车403与码垛机构物料输出端连接,伸缩结构504移动将码放好的盒体运送至运输小车403内。且运输小车403与码垛机构物料输出端连接处具有密封结构507,本实施例中密封结构507为密封门。
67.运输小车403具有自导航功能,伸缩结构504将码放好的盒体运送至运输小车403内以后,运输小车403可以自动导航并运动至烧结炉处,将盒体送至烧结炉内。本实施例中,运输小车403优选为agv小车(automatedguidedvehicle自动导向车)。
68.下面对本实施例中磁块码垛装置的工作过程叙述如下:
69.粉末成型压机物料输出端压制好的磁块在送料组件302的作用下将其放置于磁块放置组件303上,并通过消磁组件301消除磁块的剩磁,然后经第一夹取组件304将磁块码放至送盒机构2送至码盒机构物料码放端处的空盒体6内,当空盒体6装满后通过第二运输组件402运输至第一运输组件物料输入端。盒体经第一运输组件401运送至码垛机构物料输入端,在第二夹取结构505将盒体逐层码放至伸缩结构504上,相邻两层的盒体通过上层盒体的凸台与下层盒体的凹槽卡接实现盒体的固定。当伸缩结构504上的盒体码放至最后一层时,通过送盖机构7和扣盖机构8将盒盖9盖在第一运输组件401上运送的盒体上,使伸缩结构504上最顶层的盒体通过盒盖9密封。当伸缩结构504上码放好盒体以后将盒体运输至运输小车403,最后通过运输小车403运输至烧结炉。
70.在其他实施例中,第一递送结构203可以采用气缸,气缸在进行线性运动时可以将空盒体6推送至第二运输组件402上,同样可以完成将第一升降平台201上放置的空盒体6送至运输机构4中的第二运输组件402上的功能。
71.在其他实施例中,第一夹取组件304的夹取端也可以设置为吸盘,通过吸盘来吸取磁块。
72.在其他实施例中,送盒机构2和码盒机构3的数量可以为一组、三组等,可以根据生产需求进行数量上的调整,但是送盒机构2和码盒机构3数量应当保持相同。
73.在其他实施例中,导向结构506中导向杆5061的数量也可以是六个、八个等。
74.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或
变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1