一种自走式电控滑车吊挂作业设备及作业方法与流程
本发明涉及滑车载荷吊挂,具体涉及一种自走式电控滑车吊挂作业设备及作业方法。
背景技术:
1、海洋中的船体都会遇到小型水生物藤壶、海藻等附着问题,它们附着在船体表面会增大行驶阻力和腐蚀船体材料,造成能源浪费降低船体使用寿命,现很多港口提供船体表面水下清扫服务或定期坞修。在对海洋船舶外表面进行清污等作业时可在船头和船尾共同吊置一环绕船帮周长的缆绳,船宽两侧缆绳上各挂置滑车,滑车吊置电动葫芦,两电动葫芦下方共同吊挂一个作业设备进行清理作业,电动葫芦起升工作可使该机器人等装置贴近船体下方外表面进行船体外表面清污等相关作业,当两电动吊葫芦起升和降落为相反工作时可使机器人等装置沿船体外表面两侧向上或向下进行作业,当机器人等装置向船体长度方向移动时,须人工推拽缆绳上的滑车,这就影响了工作连续性和效率,因滑车一侧紧贴船体外表面其滑动摩擦阻力较大还需增加推拽力。
技术实现思路
1、针对现有技术的不足,本发明提供一种自走式电控滑车吊挂作业设备及作业方法,可实现遥控或自控移动,将原滑车与船体外表面的滑动摩擦移动改为动力滚动,实现下方吊置作业设备作业连续性。
2、本发明是通过如下技术方案实现的:
3、提供一种自走式电控滑车吊挂船体作业设备,包括串联电动葫芦a并张紧围设在船体外周的环形缆绳,环形缆绳上还串联有分别位于船体两侧的两个自走式电控滑车,环形缆绳正对船头和船尾处均通过吊绳与船头处和船尾处的两个电动葫芦b连接,每个自走式电控滑车的下方均通过电动葫芦c吊置有清洁作业设备,船体两侧相对两个清洁作业设备之间通过经船体底面的连接缆绳张紧连接;
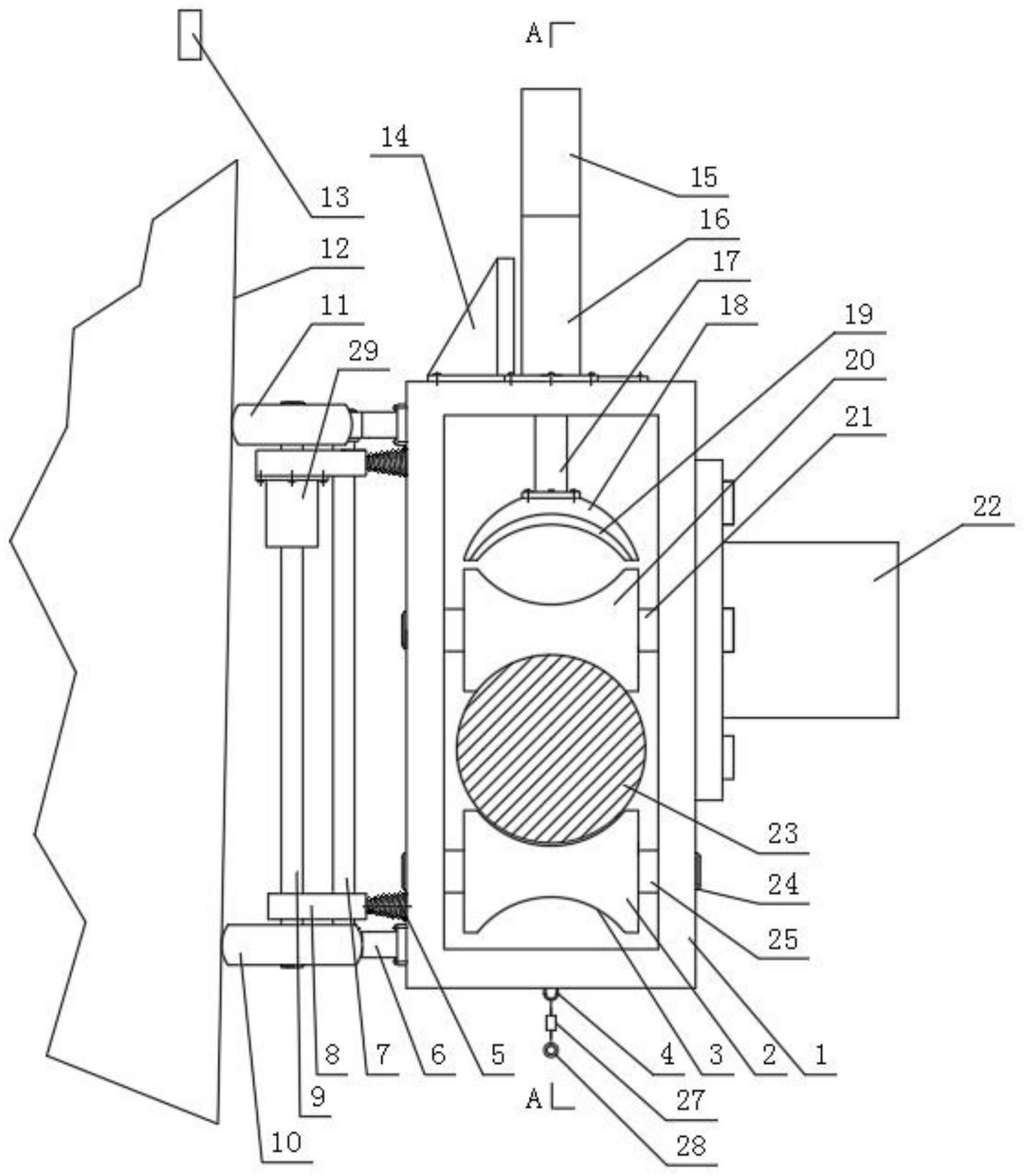
4、自走式电控滑车包括矩形框和密封安装在矩形框上且用于供电的第一电池组,在矩形框的底部中心连接电动葫芦c的吊挂端,矩形框内部转动安装有托轮,矩形框内部在托轮上方沿环形缆绳穿过方向前后依次转动安装有两个通过伺服电机b驱动的辊轮,矩形框的内部在两辊轮之间设置压板,压板通过与安装在矩形框顶部的伸缩机构连接可对环形缆绳施力,矩形框在安装伺服电机b正对的另一侧上下通过螺栓各固定一轴座a,两轴座a之间安装一垂直轴a,垂直轴a的上部和下部各连接有一条形板,条形板正对矩形框一面在两端分别与矩形框之间连接有锥形压缩弹簧,两条形板在长度方向的两端分别通过垂直轴c连接,垂直轴c由固定在条形板上的伺服电机c驱动,两垂直轴c的一端安装上轮且另一端安装下轮。
5、进一步的,清洁作业设备包括安装有履带传动机构的底盘以及密封安装在底盘上的第二电池组,底盘上还安装有伺服电机d,伺服电机d的轴d通过法兰d和固定卡a固定有由伺服电机e驱动的电动缸e,电动缸e的伸缩缸e的端部通过法兰e和固定卡b垂直连接有由伺服电机f驱动的电动缸f,电动缸f的顶部安装有监控摄像头a,电动缸f的伸缩缸f通过法兰f连接有伺服电机g,伺服电机g的轴g通过法兰g连接有伺服电机h,伺服电机h的轴h通过轴座b连接有切割电机,切割电机的外周径向均布固定四个监控摄像头b,切割电机的转动轴上安装有切割刀头。
6、清洁作业设备通过履带传动机构在船体表面移动,配合监控摄像头a和监控摄像头b观查发现船体上生长的植物,利用切割刀头转动实现切割清除,同时多个伺服电机控制,可实现清洁作业设备在一定范围内的清洁作业,可根据需要调整清洁范围,实现对船体侧面的全部清洁。
7、进一步的,伸缩机构包括固定在矩形框外顶部的电动缸a以及为电动缸a提供动力的伺服电机a,电动缸a的伸缩缸a伸入矩形框内部连接有与缆绳配合刹车的压板。
8、伺服电机a驱动电动缸,利用电动缸的伸缩缸带动压板上下移动,压板与缆绳之间挤压摩擦,可实现整体的刹车功能。
9、进一步的,压板与环形缆绳接触的一面形成有与环形缆绳表面相配的弧形面并在弧形面上固定有阻尼耐磨层。
10、压板上设置弧形面,与缆绳形状相同,方便增大与缆绳之间的接触面积,压板与缆绳之间形成有阻尼耐磨层可用于对压板进行保护,阻尼耐磨层与缆绳接触后可提升摩擦力,保证刹车的稳定。
11、进一步的,上轮的直径小于下轮的直径。
12、通过设置直径大小不同的上轮和下轮,使得自走式电控滑车在受力情况下可以紧贴船体外表面水平移动,提升整体的稳定性。
13、进一步的,履带传动机构包括分别转动安装在底盘两侧的从动齿轮和主动齿轮,主动齿轮和从动齿轮之间通过封闭环形履带传动连接,底盘上两个环形履带的主动齿轮分别连接有伺服电机i和伺服电机j。
14、伺服电机i和伺服电机j分别通过驱动主动齿轮转动带动从动齿轮转动进而可控制两侧的环形履带转动,实现清洁作业设备整体进行移动,操作方便。
15、进一步的,底盘下表面四角处均安装有距离传感器。
16、底盘下表面四角处各设有距离传感器,某个距离传感器的值大于其它三个值时对应一侧环形履带的伺服电机i或伺服电机j工作,使四个距离传感器的值接近相同,由此确保两环形履带与船体外表面良好接触。
17、进一步的,每个封闭环形履带内侧下方设有两个与履带下部内侧接触的压轮,压轮装在压轮轴上,压轮轴安装在压轮轴座内,压轮轴座通过螺栓固定在底盘的下表面;每个封闭环形履带内侧上方设有两个与履带上部内侧接触的撑轮,撑轮装在撑轮轴上,撑轮轴安装在撑轮轴座内,撑轮轴座通过螺栓固定在底盘的上表面。
18、压轮可用于对履带内侧下方进行支撑,撑轮可以用于对履带内侧上方进行支撑,与压轮配合起到对履带的张紧作用。
19、进一步的,底盘在宽度方向两侧各对称焊接两个半环,四个半环在同一水平面内,每个半环上均套有圆环,同侧两圆环与一个v型架焊接为一体,圆环与半环之间构成铰链,v型架的尖端设有固定牵拉缆绳的结构扣,牵拉缆绳与电动葫芦c连接。
20、圆环与半环之间构成铰链,v型架仅可沿底盘高度方向摆动用于调整履带机器人与船体表面稳定接触。电动葫芦配合自走式电控滑车利用缆绳可对两侧v型架产生的合力使环形履带与船体外表面之间会产生一定的作用力,保证清洁作业设备可稳定在船体表面行走作业。
21、一种自走式电控滑车吊挂船体作业设备的作业方法,包括以下步骤:
22、s1、分别控制船头和船尾处的两个电动葫芦b工作,使船头处和船尾处的两段吊绳达到设定长度,控制电动葫芦a工作使环形缆绳张紧在船体外周,控制两个电动葫芦c工作,使清洁作业设备分别紧贴船体两侧外表面;
23、s2、启动清洁作业设备在船体侧面进行清洁工作,控制伺服电机d工作可使切割刀头以伺服电机d为圆心转动,控制伺服电机e工作可使切割刀头水平移动,控制伺服电机f工作可使切割刀头竖向移动,控制伺服电机g工作可使切割刀头在水平方向转动,控制伺服电机h工作可使切割刀头在垂直方向转动,控制切割电机工作使切割刀头转动清除附着在船体上的海洋生物植物;
24、s3、作业时通过清洁作业设备的底盘四角处设置的距离传感器,判断底盘工作时与船体表面的贴合程度并利用伺服电机i和伺服电机j调整使四个距离传感器的值接近相同,确保两环形履带与船体外表面良好接触;
25、s4、在垂直轴伺服电机c可转动范围及伸缩缸a可伸长范围内区域的海洋生物植物清除完毕后,根据监控摄像头a和监控摄像头b影像情况,控制船体两侧的自走式电控滑车及电动葫芦c工作使清洁作业设备到达未清除部位如上述步骤工作。
26、本发明的有益效果:
27、本发明中自走式电控滑车可通过遥控实现自控移动,相较于传统滑车与船体外表面的滑动摩擦移动改为动力滚动,并通过在电控滑车下方吊置清洁作业设备实现了对船体外侧面清洁作业的连续性,该自走式电控滑车可加入控制系统,代替无动力滑车可适用于多种作业场景,提高工作质量和效率。
28、清洁作业设备通过自走式电控滑车、电动葫芦以及配合缆绳可实现沿在船体外表面进行船体外周清除作业,避免作业设备掉落风险,可用于铁磁性和非铁磁性及非金属船体等其它场合,整体配合使用,实现了清除船体外表面作业时作业设备连续性并可到达船体外表面更多部位,对船体周面的清洁范围广。
- 还没有人留言评论。精彩留言会获得点赞!