一种袜子摆放折叠装置的制作方法
1.本发明涉及一种袜子生产设备,尤其是一种袜子摆放折叠装置。
背景技术:
2.袜子在包装之前,通常需要进行折叠。传统的生产工艺中,通常采用人工操作的方式来实现袜子的折叠,随着自动化技术的发展,越来越多的企业开始采用自动折叠装置来实现袜子的折叠,如公开号为cn208828249u公开的一种袜子自动折叠机械以及本技术人早先申请的公开号为cn112810930a公开的一种袜子折叠机等,然而,无论是采用人工操作的方式实现折叠,还是采用自动折叠装置实现折叠,都需要在折叠之前将袜子成双摆放或者在折叠之后将袜子成双配对,以便后续进行包装,该摆放或匹配动作仍然需要人工来完成,生产效率相对较低。
3.有鉴于此,本技术对用于袜子摆放折叠装置的结构进行了深入的研究,遂有本案产生。
技术实现要素:
4.本发明的目的在于提供一种生产效率相对较高的袜子摆放折叠装置。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种袜子摆放折叠装置,包括支撑机架,所述支撑机架上设置有呈直线依次布置的接料输送机构、摆袜机构和叠袜工位,所述摆袜机构包括水平滑动连接在所述支撑机架上的工作台板、用于驱动所述工作台板滑动的横移气缸、滑动连接在所述工作台板下方或侧面的移动支架、用于驱动所述移动支架滑动的纵移气缸、位于所述工作台板上方的压板、用于驱动所述压板上下移动的顶升气缸以及位于所述压板上方的夹袜机构,所述顶升气缸安装在所述移动支架上,所述工作台板的滑动方向与所述工作台板的长度方向垂直,所述移动支架的滑动方向与所述工作台板的长度方向平行。
7.作为本发明的一种改进,所述压板为透明板。
8.作为本发明的一种改进,所述接料输送机构的输送面的水平位置高于所述工作台板的水平位置。
9.作为本发明的一种改进,所述夹袜机构包括水平滑动连接在所述支撑机架上的夹袜支架、用于驱动所述夹袜支架移动的夹袜电机、竖直滑动连接在所述夹袜支架上的升降架、用于驱动所述升降架滑动的升降气缸、安装在所述升降架上的退位气缸、固定连接在所述退位气缸的活塞杆上的连接板、缸体与所述连接板固定连接的下伸缩气缸、缸体与所述升降架固定连接的上伸缩气缸、固定连接在所述下伸缩气缸的活塞杆上的下夹板以及固定连接在所述上伸缩气缸的活塞杆上的上夹板,所述退位气缸的活塞杆与所述工作台板的长度方向平行,所述下伸缩气缸和所述上伸缩气缸的活塞杆都竖直布置,所述上夹板位于所述下夹板的正上方。
10.作为本发明的一种改进,所述上夹板上固定连接或一体连接有限位块。
11.作为本发明的一种改进,所述叠袜工位上设置有叠袜机构,所述叠袜机构包括水平布置的承接板、用于驱动所述承接板上下移动的承接气缸、位于所述承接板正上方的压袜架、用于驱动所述压袜架上下移动的压袜气缸、转动连接在所述压袜架上的压袜辊、竖直布置的折弯板、用于驱动所述折弯板上下移动的折弯气缸、水平滑动连接在所述支撑机架上的夹持组件以及用于驱动所述夹持组件滑动的折叠电机,所述夹持组件的滑动方向与所述工作台板的长度方向平行,所述压袜辊与所述承接板平行布置且与所述夹持组件的滑动方向垂直,所述折弯板位于所述承接板远离所述工作台板的一侧。
12.作为本发明的一种改进,所述承接板上固定连接有与所述压袜辊平行布置的长条和/或与所述压袜辊垂直布置的定位靠板。
13.作为本发明的一种改进,所述夹持组件包括滑动连接在所述支撑机架上的滑动架和安装在所述滑动架上的手指气缸,所述手指气缸的两个手指杆上分别固定连接有夹持板。
14.作为本发明的一种改进,所述叠袜工位还设置有出料输送机构,所述出料输送机构的输送方向与所述工作台板的长度方向平行,当所述夹持组件往远离所述承接板的方向运动到极限位置时,所述夹持组件位于所述出料输送机构的正上方。
15.作为本发明的一种改进,所述出料输送机构的一侧设置有位置调整机构,所述位置调整机构包括固定连接在所述支撑机架上的调整气缸和固定连接在所述调整气缸的活塞杆上的立板,所述调整气缸的活塞杆与所述出料输送机构的宽度方向平行布置,所述立板与所述调整气缸的活塞杆垂直布置。
16.采用上述方案,本发明具有以下有益效果:
17.1、通过设置摆袜机构,可以在折叠之前预先对将袜子成双摆放好,有效提高了生产效率。
18.2、本发明提供的袜子摆放折叠装置可以直接作为流水生产线的一部分使用,实现连续生产,进一步提高了生产效率。
19.3、本发明采用的叠袜机构,能够在袜子输送的过程中实现袜子的折叠,折叠效率相对较高。
附图说明
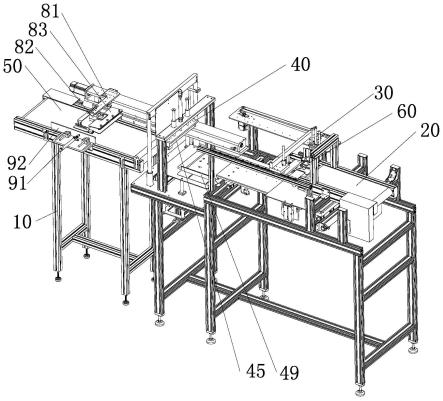
20.图1为本发明袜子摆放折叠装置的结构示意图;
21.图2为本发明袜子摆放折叠装置另一视角的结构示意图;
22.图3为本发明中摆袜机构的结构示意图;
23.图4为图3中a处位置的局部放大图。
24.图中标示对应如下:
25.10-支撑机架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20-接料输送机构;
26.30-摆袜机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31-工作台板;
27.32-横移气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33-移动支架;
28.34-纵移气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35-压板;
29.36-顶升气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
37-过渡架;
30.40-叠袜机构;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41-承接板;
31.42-承接气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43-压袜架;
32.44-压袜气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
45-压袜辊;
33.46-折弯板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
47-折弯气缸;
34.48-长条;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
49-定位靠板;
35.50-出料输送机构;
ꢀꢀꢀꢀꢀꢀꢀꢀ
51-折叠电机;
36.60-夹袜机构;
37.61-夹袜支架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
62-夹袜电机;
38.63-升降架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
64-升降气缸;
39.65-退位气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
66-连接板;
40.67-下伸缩气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
68-上伸缩气缸;
41.69-下夹板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
70-上夹板;
42.71-限位块;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
80-夹持组件;
43.81-滑动架;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
82-手指气缸;
44.83-夹持板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
90-调整机构;
45.91-调整气缸;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
92-立板。
具体实施方式
46.下面结合附图和具体实施例对本发明做进一步的说明。
47.如图1-图4所示,本实施例提供一种袜子摆放折叠装置,包括支撑机架10,该支撑机架10上设置有呈直线依次布置的接料输送机构20、摆袜机构30和叠袜工位,其中,叠袜工位可以为人工工位,在本实施例中,叠袜工位上设置有叠袜机构40和出料输送机构50。
48.接料输送机构20为常规的皮带输送机构,可从市场上直接购买获得,此处不再详述。
49.摆袜机构30包括水平滑动连接在支撑机架10上的工作台板31、用于驱动工作台板31滑动的横移气缸32、滑动连接在工作台板31下方或侧面的移动支架33、用于驱动移动支架33滑动的纵移气缸34、位于工作台板31上方的压板35、用于驱动压板35上下移动的顶升气缸36以及位于压板35上方的夹袜机构60,其中,压板35优选为透明板,以便可以直接观察到被压板35压住的袜子是否平整。接料输送机构20的输送面的水平位置高于工作台板31的水平位置,这样两者之间的高度差,袜子被夹袜机构60从接料输送机构20夹持到工作台板31上的过程中,袜子的末端会在重力作用下垂落,具有一定的整袜功能,保证袜子平整不扭曲。
50.横移气缸32的缸体固定连接在支撑机架10上,工作台板31的下侧面固定连接有水平滑动连接在支撑机架10上的过渡架37,过渡架37与横移气缸32的活塞杆固定连接,以此实现横移气缸32和工作台板31之间的连接;横移气缸32的活塞杆水平布置且与工作台板31的长度方向垂直布置,以保证工作台板31的滑动方向与工作台板31的长度方向垂直。
51.过渡架37上固定连接有滑杆,移动支架33通过滑动连接在滑杆上实现与工作台板之间的滑动连接。纵移气缸34的缸体固定连接在移动支架33上,纵移气缸34的活塞杆固定连接在移动支架33上,以此实现纵移气缸34和移动支架33之间的连接;纵移气缸34的活塞杆与工作台板31的长度方向平行布置,以保证移动支架33的滑动方向与工作台板31的长度
方向平行。
52.顶升气缸36的缸体固定连接在移动支架33上(即顶升气缸36安装在移动支架33上),顶升气缸36的活塞杆竖直朝上布置并固定连接在压板35上,以此实现压板35和顶升气缸36之间的连接。
53.夹袜机构60可以为常规的多关节机械手,在本实施例中,夹袜机构60包括水平滑动连接在支撑机架10上的夹袜支架61、用于驱动夹袜支架61移动的夹袜电机62、竖直滑动连接在夹袜支架61上的升降架63、用于驱动升降架63滑动的升降气缸64、安装在升降架63上的退位气缸65、固定连接在退位气缸65的活塞杆上的连接板66、缸体与连接板66固定连接的下伸缩气缸67、缸体与升降架63固定连接的上伸缩气缸68、固定连接在下伸缩气缸67的活塞杆上的下夹板69以及固定连接在上伸缩气缸68的活塞杆上的上夹板70,其中,夹袜支架61的滑动方向与工作台板31的长度方向平行,夹袜电机62和夹袜支架61之间的具体传动连接结构可以为常规的结构,例如通过常规的链条组件或齿轮齿条组件实现传动连接,在本实施例中,两者通过常规的传动皮带组件实现传动连接。升降气缸64的缸体固定连接在夹袜支架61上,升降气缸64的活塞杆竖直朝下布置并固定连接在升降架63上,此外,为了保证升降架63的运动精度,升降架63上还固定连接有竖直滑动连接在夹袜支架61上的导向杆。
54.退位气缸65的缸体固定连接在升降架63上,退位气缸65的活塞杆与工作台板31的长度方向平行且朝向远离接料输送机构20的一侧。下伸缩气缸67位于退位气缸65的正下方,且下伸缩气缸67和上伸缩气缸68的活塞杆都竖直朝下布置,上夹板70位于下夹板69的正上方,优选的,上夹板70上固定连接或一体连接有限位块71。
55.叠袜机构40包括水平布置的承接板41、用于驱动承接板41上下移动的承接气缸42、位于承接板41正上方的压袜架43、用于驱动压袜架43上下移动的压袜气缸44、转动连接在压袜架43上的压袜辊45、竖直布置的折弯板46、用于驱动折弯板46上下移动的折弯气缸47、水平滑动连接在支撑机架10上的夹持组件80以及用于驱动夹持组件80滑动的折叠电机51,其中,承接板41位于工作台板31远离接料输送机构20的一侧,且承接板41运动到下极限位置时的水平位置低于工作台板31的水平位置,承接板41上固定连接有竖直布置在支撑机架10上的导向杆,以保证运动精度,承接气缸42的缸体固定连接在支撑机架10上,其活塞杆竖直朝上布置并与承接板41固定连接;压袜架43上同样固定连接有竖直布置在支撑机架10上的导向杆,压袜气缸44的缸体固定连接在支撑机架10上,其活塞杆竖直朝下布置并与压袜架43固定连接;折弯板46的上端固定连接有一个横杆,该横杆的两端分别固定连接有竖直滑动连接在支撑机架10上的导向杆,折弯气缸47的缸体固定连接在支撑机架10上,其活塞杆竖直朝上布置并与横杆固定连接。此外,折弯板46位于承接板41远离工作台板31的一侧,折弯板46与承接板41在水平面上的投影相互错位布置,且两者之间的间距略大于一双袜子的厚度的1-5倍。
56.优选的,承接板41上固定连接有与压袜辊45平行布置的长条48和/或与压袜辊45垂直布置的定位靠板49。在本实施例中,承接板41上同时设置有长条48和定位靠板49,其中,长条48和压袜辊45在水平面上的投影相互错位布置,这样当压袜辊45将袜子压紧在承接板41上之后,长条48的存在会导致袜子弯折,增加其相对于承接板41移动的阻力,保证折叠位置的准确性。定位靠板49有两个,两个定位靠板49相互平行布置,且都位于长条48朝向
工作台板31的一侧,用于保证袜子能够位于压袜辊45的长度对应的范围内。
57.折叠电机51和夹持组件80之间的具体传动连接结构可以为常规的结构,如皮带组件、齿轮齿条组件或链条组件等,此处不再详述。夹持组件80的滑动方向与工作台板31的长度方向平行,压袜辊45与承接板41平行布置且与夹持组件80的滑动方向垂直。
58.夹持组件80包括滑动连接在支撑机架10上的滑动架81和安装在滑动架81上的手指气缸82,其中,手指气缸82的两个手指杆上分别固定连接有夹持板83,两个夹持板83上下布置。
59.出料输送机构50为常规的皮带输送机构,可从市场上直接购买获得,此处不再详述。出料输送机构50的输送方向与工作台板31的长度方向平行。当夹持组件80往远离承接板41的方向运动到极限位置时,夹持组件80位于出料输送机构50的输送面的正上方,当夹持组件80往朝向工作台板31的方向运动到极限位置时,承接板穿插在两个夹持板83之间。
60.优选的,出料输送机构50的一侧设置有位置调整机构90,位置调整机构90包括固定连接在支撑机架10上的调整气缸91和固定连接在调整气缸91的活塞杆上的立板92,调整气缸91的活塞杆与出料输送机构50的宽度方向平行布置,立板92与调整气缸91的活塞杆垂直布置,这样可以利用调整气缸91的伸缩动作推动立板92移动,进而推动位于出料输送机构50上的袜子在输送面上的位置,实现袜子输送位置的调整,便于后续进行包装。
61.使用时,袜子被依次放置在接料输送机构20上,且袜子的袜口朝向摆袜机构30,当袜子被接料输送机构20输送到输送面的末端时,利用夹袜机构60夹住袜子的袜口(通过下伸缩气缸67和上伸缩气缸68驱动上夹板70和下夹板69动作实现),然后夹袜电机62驱动夹袜支架61往远离接料输送机构20的方向移动,同时升降气缸64驱动升降架63下移,将袜子夹放置到工作台板31远离接料输送机构20的一端上,接着下伸缩气缸67和上伸缩气缸68驱动上夹板70和下夹板69动作松开,同时退位气缸65的活塞杆伸出,带动下夹板69从袜子正下方移开,以避免夹袜机构60复位的过程中碰到袜子;在夹袜机构60复位的过程中,横移气缸32驱动工作台板31沿其宽度方向移动,再利用夹袜机构60再次将另一只袜子夹取并放置到工作台板31上,与早先放置的袜子并列,需要说明的是,工作台板31并列摆放的袜子数量可以根据实际需要确定,只需重复上述动作即可,此处以工作台板31上同时摆放两只并列的袜子为例进行说明。完成上述动作之后,纵移气缸34驱动压板35移动到并排在工作台板31上的各袜子的正上方,然后利用顶升气缸36驱动压板35下移并压在各袜子的袜身(即袜口位置没有被压住),接着,夹袜机构60再次夹取袜子并叠放在位于工作台板31上的各袜子的上方,具体的动作与上文描述的动作相同,此处不再详述,叠放之后,压板会被夹持在两个相互层叠的袜子之间,完成袜子的摆放动作;接着,利用夹持组件80同时将摆放在工作台板31上的各袜子夹住,之后压板35复位,夹持组件80将袜子夹取并放置到承接板41和出料输送机构50的输送面上,也就是说,此时袜子的一端位于工作台板31上,另一端位于出料输送机构50的输送面上,当然,当袜子较短时,也可以仅放置在工作台板31上,然后承接气缸42驱动承接板41上移,同时压袜气缸44驱动压袜辊45下移并将袜子压紧在承接板41上,这样有助于缩短运动行程,提高效率;接着,折弯气缸47带动折弯板46下移,将被压住的袜子的一端(即放置在出料输送机构50的输送面上的部分)向下推送,使得袜子呈直角弯折;弯折动作完成之后,折弯板46复位,利用夹持组件80夹住袜子的弯折部,然后压袜辊45复位,夹持组件80带动袜子往远离承接板41的方向移动并松开,使得袜子被拖动到出料输送机构
50的输送面,此时袜子呈被折叠状态;最后,袜子经出料输送机构50输送到下一个工位(通常为包装工位等常规的工位,并非本实施例的一部分,需要在使用时另外配置,此处不再详述),完成摆放折叠动作,袜子在出料输送机构50上输送的过程中,可以利用位置调整机构90调整袜子的输送位置,以便更好的与下一个工位配合。
62.上面结合附图对本发明做了详细的说明,但是本发明的实施方式并不仅限于上述实施方式,本领域技术人员根据现有技术可以对本发明做出各种变化和应用,例如将上述实施例中的气缸替换为液压缸或推杆电机等,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1