一种大容量物料储料装置的制作方法
1.本发明涉及大容量物料存储的技术领域,尤其是涉及一种大容量物料储料装置。
背景技术:
2.多支单排塑料瓶生产线往往是一整条生产线,包括多个生产环节的单机。当其中一个单机需要短时间暂停时,为不影响整条生产线的运行,需要设置一个用于暂存暂停的单机上的物料的暂存点。
3.目前市面上的多支单排塑料瓶生产线为了不影响整条生产线的运行,通常将暂存点设置为收集箱,并采用以下两种方式将暂停的单机上的物料移至收集箱:一种是通过气吹将生产线上的物料直接吹入收集箱,另一种是通过气缸摆动导向装置将引导物料的输送方向,将物料导入进收集箱中。
4.但上述方式的缺陷是:暂存的物料散落在收集箱中,需要人工重新码垛整齐才能重新投入至生产线继续下一工序。
技术实现要素:
5.为了使物料有序码垛于暂存点以便于继续投入至生产线继续下一工序,本技术提供一种大容量物料储料装置。
6.本技术提供的一种大容量物料储料装置采用如下的技术方案:一种大容量物料储料装置,包括机架,以及进料输送带,用于将物料呈单列排布输入;定量排列机构,设于进料输送带上,所述定量排列机构包括沿进料输送带的输送方向间隔设置的两组拦截气缸和与两组拦截气缸一一对应的两组检测传感器,所述定量排列机构将需暂存的物料定量排列于两拦截气缸之间;缓存输送带,所述缓存输送带上设有若干用于暂存呈单列排布的物料的工位料槽;机械夹持机构,用于将定量排列机构中的物料夹取至缓存输送带的工位料槽中或将缓存输送带的工位料槽中物料夹取至进料输送带中;机器人,所述机械夹持机构安装于机器人的主轴。
7.通过采用上述技术方案,当生产线中的单机暂停工作时,位于进料输送带输送方向前端的检测传感器检测到无物料,位于进料输送带输送方向尾端的拦截气缸处于收回状态,位于进料输送带输送方向前端的拦截气缸处于推出状态,物料传送至定量排列机构中;当位于进料输送带输送方向尾端的检测传感器检测到排满整数物料时,位于进料输送带输送方向尾端的拦截气缸推出顶住物料,实现单排排列的物料的定量拦截;然后通过机械夹持机构将定量排列机构中的物料夹取至缓存输送带的工位料槽中,实现单排排列的物料的暂存;当暂停的单机恢复生产时,通过机械夹持机构夹取工位料槽中的物料放入进料输送带中即可重新投入生产线继续下一工序,有效提高了生产效率。
8.优选的,所述定量排列机构还包括导正气缸、导正杆和导正护栏,所述导正杆固定于导正气缸的输出端,所述导正护栏固设于进料输送带,所述导正杆和导正护栏均沿进料输送带的输送方向设置,所述导正杆和导正护栏分别位于物料的两侧。
9.通过采用上述技术方案,定量排列机构中的物料达到预定数量时,导正气缸将导正杆推出使导正杆与整排物料抵接,顶压整排物料使物料倚靠于导正护栏,使物料进一步排列整齐,以便机械夹持机构夹取。
10.优选的,所述拦截气缸的输出端固定有拦截板,所述导向杆的两端伸出至两组拦截气缸的两侧,所述导向杆上开设有用于使拦截板通过的让位槽。
11.通过采用上述技术方案,确保导正杆的导向范围,使导正杆能与整排物料抵接,避免导向时个别物料的遗漏。
12.优选的,所述机械夹持机构包括与机器人的主轴连接的机械手基板,所述机械手基板设有内夹板和外夹板,所述内夹板固设于机械手基板,所述机械手基板上设有用于驱动外夹板开合的夹持气缸。
13.通过采用上述技术方案,通过夹持气缸的收回与张开,控制外夹板的收回与张开,从而实现对物料的夹取与放置。
14.优选的,所述外夹板依次排列有两组,所述夹持气缸与外夹板一一对应。
15.通过采用上述技术方案,避免了使用一组夹持气缸驱动长度较长的外夹板造成外夹板两侧夹紧程度差的问题,并通过将外夹板设为两组,避免由于两组夹持气缸对应长度较长的外夹板时,由于两组夹紧气缸的同步性问题造成外夹板变形的情况,确保夹持气缸对外夹板的正常驱动。
16.优选的,所述内夹板和外夹板相对的侧壁上设有硅胶条。
17.通过采用上述技术方案,硅胶条的设置增加了内夹板、外夹板与物料之间的摩擦力的同时,还能有效防止夹伤物料,确保物料的生产质量。
18.优选的,所述缓存输送带包括传送链条以及用于驱动传送链条的转动的链轮和伺服电机,所述传送链条上等距设有若干弯板,所述工位料槽开设于弯板,所述缓存输送带上还设有测物传感器。
19.通过采用上述技术方案,当机械夹持机构将物料放置于工位料槽中时,测物传感器检测到有物料,此时伺服电机带动传动链条向前移动,使下一空置的工位料槽正对机械夹持机构的下放位置。
20.优选的,所述缓存输送带输送方向的前端设有满料检测传感器。
21.通过采用上述技术方案,随着缓存输送带不断向前端输送物料,当满料检测传感器检测到物料时,缓存输送带满料,机械夹持机构停止向缓存输送带夹取物料。
22.优选的,所述内夹板和外夹板相背的侧壁上均铰接有稳固件,所述稳固件处于下翻状态时,所述稳固件底端抵接于物料底部,所述内夹板或外夹板上分别设有用于驱动稳固件转动的电机。
23.通过采用上述技术方案,当物料为具有一定柔性的塑胶材质时,通过电机驱动稳定件下翻至与物料底部抵接,限制物料底部的晃动,确保物料在机械夹持机构的作用下移运时的稳定性。
24.综上所述,本技术包括以下至少一种有益技术效果:
1.当生产线中的单机暂停工作时,通过进料输送带、机械夹持机构和缓存输送带的配合,实现单排排列的物料的暂存;当暂停的单机恢复生产时,通过机械夹持机构夹取工位料槽中的物料放入进料输送带中即可重新投入生产线继续下一工序,有效提高了生产效率。
25.2.定量排列机构中的物料达到预定数量时,导正气缸将导正杆推出使导正杆与整排物料抵接,顶压整排物料使物料倚靠于导正护栏,使物料进一步排列整齐,以便机械夹持机构夹取。
26.3.当物料为具有一定柔性的塑胶材质时,通过电机驱动稳定件下翻至与物料底部抵接,限制物料底部的晃动,确保物料在机械夹持机构的作用下移运时的稳定性。
附图说明
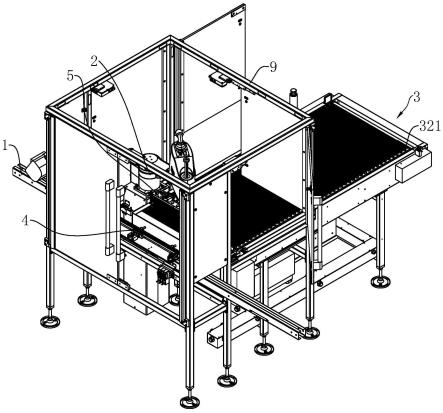
27.图1是显示本技术实施例一中的大容量物料储料装置的整体结构示意图。
28.图2是显示本技术实施例一中的进料输送带及定量排列机构的局部结构示意图。
29.图3是显示本技术实施例一中的机器人以及机械夹持机构的局部结构示意图。
30.图4是显示本技术实施例一中的缓冲输送带的局部结构示意图。
31.图5是图4中a部分的局部放大示意图。
32.图6是显示本技术实施例二中的稳定架及电机的侧面示意图。
33.图7是显示本技术实施例二中的稳定架结构的正面示意图。
34.附图标记说明:1、进料输送带;2、机器人;3、缓存输送带;31、传送链条;32、弯板;321、工位料槽;33、测物传感器;34、满料检测传感器;35、定位检测传感器;4、定量排列机构;41、前拦截气缸;42、后拦截气缸;43、前检测传感器;44、后检测传感器;45、导向组件;451、导正气缸;452、导正杆;4521、让位槽;453、导正护栏;46、拦截板;5、机械夹持机构;51、机械手基板;52、内夹板;53、第一外夹板;54、第二外夹板;55、硅胶条;6、抱紧座;7、稳定架;71、缓冲条;8、电机;9、安全防护罩。
具体实施方式
35.以下结合附图1-7对本技术作进一步详细说明。
36.本技术实施例公开一种大容量物料储料装置。
37.实施例一参照图1,一种大容量物料储料装置,包括机架和设于机架上的进料输送带1、机器人2以及缓存输送带3,缓存输送带3上设有用于存储呈单列排布的物料的工位料槽321。进料输送带1用于将物料呈单列排布输入,进料输送带1上设有用于将输入的物料拦截并定量竖直排列整齐的定量排列机构4。机器人2上设有机械夹持机构5,用于将竖直排列于进料输送带1的物料夹持并放入至缓存输送带3上的工位料槽321中。
38.为保护储料装置中的各部件,机架上设有安全防护罩9。
39.结合图1和图2,定量排列机构4包括前后间隔设置的两组拦截气缸、前后间隔设置的两组检测传感器和用于将物料导正的导向组件45。位于进料输送带1输送方向前侧的为前拦截气缸41,另一组则为后拦截气缸42。与前拦截气缸41对应的为前检测传感器43,另一
组为后检测传感器44。
40.当生产线中的单机出现暂停时,前检测传感器43检测无物料,后拦截气缸42处于收回状态,前拦截气缸41处于推出状态,物料传送至定量排列机构4中。后检测传感器44检测到排满整数物料时,后拦截气缸42推出顶住物料,实现物料的定量拦截。
41.导向组件45包括导正气缸451和固定于导正气缸451的输出端的导正杆452,导正杆452沿进料输送带1的长度方向设置,进料输送带1上固定有位于导正杆452对侧的导正护栏453,导正护栏453与导正杆452平行设置。当定量排列机构4中的物料达到预定数量时,导正气缸451推出导正杆452使导正杆452与整排物料抵接,顶压整排物料使物料倚靠于导正护栏453,进而让物料整齐竖直排列。
42.为确保导正杆452能与整排物料抵接,导正杆452的两端伸出至两组拦截气缸的两侧。拦截气缸的输出端固定有拦截板46,导正杆452上开设有用于供拦截板46穿过的让位槽4521。
43.结合图1和图3,机器人2位于缓存输送带3的一侧,机械夹持机构5通过抱紧座6安装于机器人2的主轴上。机械夹持机构5包括固定于抱紧座6的机械手基板51和设于机械手基板51上的内夹板52、第一外夹板53以及第二外夹板54,机械手基板51上设有用于驱动第一外夹板53和第二外夹板54开合的两个夹持气缸。内夹板52沿物料的排列方向设置,第一外夹板53和第二外夹板54于内夹板52的对侧沿物料的排列方向排布。通过夹持气缸推出使机械夹持机构5张开,通过夹持气缸收回使第一外夹板53和第二外夹板54夹持物料移动至定量排列机构4上方,下移夹取整齐竖直排列的物料,移动至缓存输送带3上方。
44.内夹板52、第一外夹板53和第二外夹板54相对的侧壁上均安装有硅胶条55,机械夹持机构5夹持物料时,硅胶条55与物料抵接,增加与物料之间的摩擦力的同时,还有效防止夹伤物料。
45.结合图1、图4和图5,缓存输送带3包括两条传送链条31和用于驱动传送链条31的链轮,链轮通过传动轴与伺服电机连接,伺服电机每个周期转动固定角度,带动传送链条31向前移动固定距离。两条传送链条31之间每隔固定的距离配置一块弯板32,工位料槽321开设于弯板32上,多条工位料槽321于多块弯板32上水平等距设置。
46.缓存输送带3上设有测物传感器33,测物传感器33在插入工位位置检测到有物料,此时伺服电机带动传送链条31将物料向外输送。
47.缓存输送带3上设有满料检测传感器34,满料检测传感器34位于缓存输送带3输送方向的前端。物料随着缓存输送带3向前移动,满料检测传感器34感应到物料时,反馈给系统并停止机械夹持机构5继续向缓存输送带3夹取物料。
48.缓存输送带3上设有定位检测传感器35,定位检测传感器35位于缓存输送带3输送方向的尾端。暂停的单机恢复生产时,缓存输送带3将物料向靠近定位检测传感器35的一端移动,通过定位检测传感器35感应到定位检测点时,确保工位料槽321已移动到固定的抓取位置。
49.本技术实施例一种大容量物料储料装置的实施原理为:当单机暂停工作时, 前检测传感器43检测无物料,后拦截气缸42处于收回状态,前拦截气缸41处于推出状态,物料传送至定量排列机构4中。后检测传感器44检测到排满整数物料时,后拦截气缸42推出顶住物料,实现物料的定量拦截,并通过导向组件45将物料整
齐竖直排列;机械夹持机构5夹取整齐竖直排列的物料,移动至缓存输送带3上方,并下方至工位料槽321中;测物传感器33在插入工位位置检测到有物料,伺服电机带动传送链条31将物料向外输送,当满料检测传感器34感应到物料时,反馈给系统并停止机械夹持机构5继续向缓存输送带3夹取物料;暂停的单机恢复生产时,缓存输送带3将物料向靠近定位检测传感器35的一端移动,通过定位检测传感器35感应到定位检测点时,确保工位料槽321已移动到固定的抓取位置;机械夹持机构5下移抓取缓存输送带3上的物料,并移动至定量排列机构4上方,此时后拦截气缸42推出拦截前方来料,机械夹持结构下移并把整排物料插入至进料输送带1中,进料输送带1将物料输送至下一工位;若测物传感器33在抓取过程中感应到个别物料还遗留在工位料槽321上,则缓存输送带3还保持在原位置,机械夹持机构5再进行一次抓取,确保无物料遗留,伺服电机带动缓存输送带3移动,如此往复动作并清空缓存输送带3上的物料,通过设置缓存输送带3并配合机械夹持机构5往复抓取,使整齐竖直排列的物料插入于至工位料槽321中,实现暂存的物料的整齐排列。
50.实施例二结合图6和图7,一种大容量物料储料装置,与实施例一不同之处在于,第一外夹板53和第二外夹板54共同构成与内夹板52相对设置的外夹板,内夹板52和外夹板相背的侧壁上均设有用于限制物料底部稳定性的稳固件。
51.当物料为具有一定柔性的塑胶材质时,机械夹持机构5仅夹取物料的顶部,移运物料的过程中,容易造成物料底部的晃动,增加了将物料插入于工位料槽321中的插入难度。
52.本实施例中,稳固件为呈矩型设置的稳定架7,以内夹板52侧的稳定架7为例,稳定架7顶端通过转轴转动连接于内夹板52外壁,转动轴沿内夹板52的长度方向设置。内夹板52的一端设有用于驱动转动轴转动以带动稳定架7转动的电机8。
53.机械夹持机构5未夹持物料时,稳定架7处于上翻状态;机械夹持机构5夹取物料顶部将物料逐渐移出时,电机8驱动稳定架7转动,使稳定架7下翻,直至稳定架7底端抵接于物料底部外侧,限制物料底部的晃动。
54.稳定架7设为框架结构,以减轻机械夹持机构5的整体重量。
55.稳定架7底部内侧设有缓冲条71,物料两侧的稳定架7抵接于物料底部时,缓冲条71与物料抵接,增加与物料之间的摩擦力,从而提升对物料的稳定效果。
56.机械夹持机构5将物料夹取至工位料槽321上方时,随着机械夹持机构5的不断下放,为避免稳定架7与缓冲输送带干涉,通过电机8不断驱动稳定架7上翻即可。
57.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1