物料转运车的制作方法
1.本技术涉及一种物料转运车,尤其涉及一种可以调整车身高度并且方便装卸的物料转运车。
背景技术:
2.一般情况下,物料的转运主要通过普通的人力推车实现,然而,对于重量较大的物料,装卸过程中,车身高度会随着重量变化而上升或下降,进出料时需调整推车进出料高度,但是,现有的物料推车调整推车进出料高度不仅操作困难而且容易损伤物料。此外,有些物料如硬质合金进出炉时,由于温度较高,手动装卸进出料时,对人体存在烫伤危险。
技术实现要素:
3.为解决背景技术中的问题,本技术提供一种可调整车身高度并且方便装卸的物料转运车。
4.一种物料转运车,所述物料转运车包括车架、升降机构及装卸机构。所述升降机构设置于所述车架上,所述升降机构包括:升降架和液压缸,所述升降架一端设于所述车架上,所述液压缸连接所述升降架,以驱动所述升降架的另一端升降。所述装卸机构设置于所述升降机构的升降架上,所述装卸机构包括载料台、电机、传动组件、丝杆、挂钩组件及载板,所述电机、所述传动组件和所述丝杆设于所述载料台上,所述电机通过传动组件带动所述丝杆转动,所述挂钩组件可滑动地设置于所述丝杆上,所述丝杆用于带动所述挂钩组件沿所述丝杆移动,所述挂钩组件带动载板从进出料口滑入或滑出载料台上。
5.进一步地,所述升降机构还包括感测件和控制器,所述感测件设置于所述载料台,以感测所述进出料口的实际高度,所述控制器设置于所述车架。所述控制器电性连接所述感测件以接收所述实际高度,所述控制器用于依据一预设高度及所述实际高度生成驱动指令。所述液压缸电性连接所述控制器以接收所述驱动指令,所述液压缸依据所述驱动指令驱动所述升降架的另一端的升降,以使所述实际高度与所述预设高度相符。
6.进一步地,所述控制器电性连接所述电机,所述物料转运车还包括操作盒,所述操作盒可拆卸地设置于所述升降架,所述操作盒包括壳体及设于所述壳体内的多个开关,每一所述开关电性连接所述控制器。
7.进一步地,所述物料转运车还包括储能电池,所述储能电池设置于所述车架内,所述储能电池电连接所述液压缸、所述感测件及所述控制器。
8.进一步地,所述感测件为激光测距仪,所述液压缸为单活塞液压缸,所述升降架为剪刀式叉架。
9.进一步地,所述挂钩组件包括活动座及可转动设置于所述活动座上的挂钩件,所述活动座设贯设有通孔,所述通孔的内周壁设有齿条,所述丝杆的外周设有外螺纹,所述齿条与所述外螺纹相匹配,以容许所述丝杆带动所述活动座和所述挂钩件沿所述丝杆移动。
10.进一步地,所述挂钩件包括第一部分及连接于所述第一部分端部的第二部分,所
述第一部分可转动地连接于所述活动座,所述第一部分设有锁止孔,所述第二部分用于钩住所述物料。所述装卸机构还包括锁止件,所述锁止件包括本体部及锁止销,所述本体部设置于所述活动座,所述锁止销可活动地设置于所述本体部,所述锁止销用于伸入所述锁止孔内。
11.进一步地,所述载料台还包括多个辊轮,所述载料台于所述丝杆的相对两侧设置有开槽,所述开槽沿所述丝杆的延伸方向延伸,多个所述辊轮并排设置于每一所述开槽内。
12.进一步地,所述车架包括底架及车头,所述车头设置于所述底架的端部以围成容置空间,所述升降架的一端设置于所述容置空间内。
13.进一步地,所述车架还包括操作臂及多个滑轮,所述操作臂设置于所述车头背离所述容置空间的一侧,所述滑轮设置于所述底架背离所述容置空间的一侧。
14.本技术提供的物料转运车在车架上设置升降机构及卸料机构,所述升降机构通过设置液压缸带动升降架上升或下降,无需人力调高,有利于实现自动调整该物料转运车的高度以适应硬质合金半成品的装卸,同时卸料机构利用所述电机带动丝杆,丝杆带动载板,载板可以装载硬质合金烧结半成品,从而有利于实现对硬质合金半成品的自动化装卸,降低硬质合金烧结半成品的受损风险,并降低高温的硬质合金烧结半成品对操作人员的烫伤风险。
附图说明
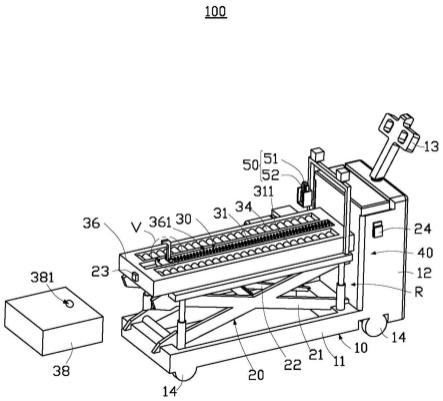
15.图1为本技术一实施例提供的物料转运车的示意图。
16.图2为图1所示的物料转运车的另一角度示意图。
17.图3为图1所示的物料转运车调高前的侧面示意图。
18.图4为图1所示的物料转运车调高后的侧面示意图。
19.图5为图1所示物料转运车的局部区域v的放大图。
20.主要元件符号说明
21.物料转运车
ꢀꢀꢀꢀꢀꢀꢀꢀ
100
22.车架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
23.底架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
24.车头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
25.操作臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
26.滑轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
27.升降机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
28.升降架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
29.液压缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22
30.感测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23
31.控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24
32.装卸机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
30
33.丝杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
34.外螺纹
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
35.电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
36.挂钩组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
37.活动座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
331
38.挂钩件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332
39.第一部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332a
40.第二部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332b
41.锁止孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
333c
42.辊轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
43.锁止件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35
44.本体部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
351
45.锁止销
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
352
46.载料台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
36
47.开槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
361
48.传动组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
37
49.载板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
38
50.孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
381
51.储能电池
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40
52.操作盒
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50
53.壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
54.开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
52
55.预设高度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀh56.实际高度
ꢀꢀꢀꢀꢀꢀꢀꢀꢀs57.容置空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀr58.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
59.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。
60.需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存于居中元件。当一个元件被认为是“设置于”另一个元件,它可以是直接设置于另一个元件上或者可能同时存于居中元件。
61.请参见图1,本技术一实施例提供一种物料转运车100,所述物料转运车100可以用于运输质量超过一千公斤的硬质合金烧结半成品(图未示),并可以实现对该硬质合金烧结半成品的自动装卸。在本技术的其他实施例中,所述物料转运车100也可以应用于其他重质量物料的运输,例如,钢材模具等。
62.请一并参见图1、图3及图4,所述物料转运车100包括车架10及设置于所述车架10上的升降机构20、装卸机构30及储能电池40。所述装卸机构30设置于所述升降机构20上,所述升降机构20用于将装卸机构30升高或者下降至预设高度h(该预设高度取决于硬质合金烧结炉或者其他加工站的出料口与地面的高度),所述装卸机构30用于将硬质合金烧结半成品从烧结炉的出料口钩入所述升降机构20上或者将所述硬质合金烧结半成品从物料转
运车100上推入至烧结炉内。所述储能电池40电性连接所述升降机构20及所述装卸机构30以提供电能。
63.所述升降机构20包括升降架21、液压缸22、感测件23以及控制器24。所述升降架21一端固定设置于所述车架10上,所述液压缸22连接所述升降架21以带动所述升降架21的另一端上升或下降。所述感测件23连接于所述升降架21的另一端。具体的,该感测件23设置在升降架21朝向烧结炉的进出料口的一端,用以测量烧结炉的进出料口的实际高度s。所述控制器24设置于所述车架10上,所述控制器24电性连接所述感测件23及所述液压缸22,所述控制器24内存储有所述装卸机构30的预设高度h,所述感测件23将进出料口的所述实际高度s发送给所述控制器24,所述控制器24依据所述预设高度h和所述实际高度s生成驱动指令,所述液压缸22依据所述驱动指令带动所述升降架21的另一端上升或下降,以使得所述实际高度s大致与所述预设高度h相同。
64.请一并参见图3及图4,具体地,如果所述实际高度s小于所述预设高度h,则所述控制器24依据所述实际高度s与所述预设高度h的差值生成上升驱动指令,所述液压缸22接收所述上升驱动指令并且驱动所述升降架21的另一端上升,从而使得所述实际高度s大致与所述预设高度h相同。相反地,如果所述实际高度s大于所述预设高度h,则所述控制器24依据所述实际高度s与所述预设高度h的差值生产下降驱动指令,所述液压缸22接收所述下降驱动指令并驱动所述升降架21的另一端下降,从而使得所述实际高度s大致与所述预设高度h相同。可以理解地,所述物料转运车100的实际操作者也可以直观判断所述实际高度s与硬质合金烧结炉或者其他加工站的出料口与地面的高度的差异,然后通过控制所述液压缸22实现对所述升降架21实际高度s的控制,此时,所述感测件23和所述控制器24可以省略。
65.请一并参见图1和图2,在本实施例中,所述升降架21为剪刀式叉架、导轨式升降架中的任意一种。所述液压缸22为单活塞液压缸或者双活塞液压缸中的任意一种。所述感测件23为激光测距仪、超声波测距仪及红外测距仪中的任意一种。所述控制器24为可以为中央处理单元(central processing unit,cpu)、通用处理器、数字信号处理器(digital signal processor,dsp)、专用集成电路(application specific integrated circuit,asic)中的任意一种。
66.本技术提供的物料转运车100进一步通过设置控制器24控制所述液压缸22带动所述升降架21上升或者下降,并利用感测件23实时给所述控制器24反馈实际高度信息,从而实现将所述升降机构20的自动调高至预定高度,有利于降低大质量载料的物料转运车100的调高难度。
67.请一并参见图1和图2,在本实施例中,所述装卸机构30包括载料台36,丝杆31、电机32、挂钩组件33、传动组件37及载板38。所述电机32和所述丝杆31设置于所述载料台36上,所述挂钩组件33可活动地设置于所述丝杆31上。具体地,所述电机32通过所述传动组件37连接所述丝杆31,从而带动所述丝杆31转动。优选的,传动组件37通过链轮传动方式实现,以实现较大力量的传动。具体的,传动组件37由主动链轮、被动链轮及链条组成。主动链轮与电机32相连,被动链轮与丝杆31固定连接,通过链条传动,从而容许电机32带动丝杆31转动。在丝杆31转动过程中,进一步带动所述挂钩组件33沿丝杆31直线运动。具体的,所述丝杆31的外表面设有外螺纹311,所述挂钩组件33包括活动座331及可转动设置于所述活动座331上的挂钩件332,所述活动座331设有通孔,所述通孔的内周壁设有齿条,通过齿条与
所述外螺纹311相匹配,从而使得转动的所述丝杆31带动所述活动座331沿所述丝杆31延伸方向直线移动,进而带动所述挂钩件332移动,所述挂钩件332由于可转动地设置在活动座331上,可以用于钩拉载板38。所述载板38为一石墨板,用于装载硬质合金烧结半成品。当丝杆31转动,进一步带动载板38从进出料口滑入或滑出载料台36上,从而有利于实现对硬质合金烧结半成品的自动装卸。其中,所述电机32为异步电机。可以理解地,所述电机32可以通过其他方式传动连接所述丝杆31,例如传动组件37可以为齿轮传动、蜗杆传动及螺旋传动等,此时,所述传动组件37依据具体采用的传动方式被替换或者省略。
68.本技术提供的物料转运车100在车架10上设置升降机构20及装卸机构30,所述升降机构20通过设置液压缸22带动升降架21上升或下降,无需人力调高,有利于实现自动调整该物料转运车100的高度以适应硬质合金半成品的装卸,同时装卸机构30利用所述电机32带动丝杆31,丝杆31带动载板38,载板38可以装载硬质合金烧结半成品,从而有利于实现对硬质合金半成品的自动化装卸,降低硬质合金烧结半成品的受损风险,并降低高温的硬质合金烧结半成品对操作人员的烫伤风险。
69.请一并参见图1和图2,在本实施例中,所述载料台36还包括多个辊轮34,以便于载具更好的滑动到载料台36上。所述载料台36并排设置有两个开槽361,所述开槽361设置于所述丝杆31的相对两侧,且所述开槽361沿所述丝杆31的延伸方向延伸。多个辊轮34沿垂直所述丝杆31的延伸方向并排设置于每一开槽361内,每一所述辊轮34具有旋转轴c,所述旋转轴大致与所述丝杆31的延伸方向垂直,所述辊轮34可以绕所述旋转轴c转动。使用时,所述挂钩件332钩拉装载硬质合金烧结半成品的载板38,并且在所述丝杆31的带动下,被钩拉的载板38滑入所述辊轮34上,从而带动所述辊轮34绕所述旋转轴c转动,进而减少所述载板38滑行过程所受的摩擦力,有利于让所述硬质合金烧结半成品上料或者下料过程更加顺畅。可以理解地,如果所述载料台36的表面足够光滑,所述辊轮34可以省略。
70.请参见图5,在本实施例中,所述挂钩件332大致呈“l”状,所述挂钩件332包括第一部分332a及垂直连接于所述第一部分332a端部的第二部分332b,所述第一部分332a远离所述第二部分332b的一端通过插销可转动地连接于所述活动座331,所述第二部分332b用于钩拉装载硬质合金烧结半成品的载板38。具体地,所述载板38上设有与所述第二部分332b相互匹配的孔381,所述挂钩件332能够翻转至水平状态,以容许所述第二部分332b伸入所述孔381内以实现挂钩。
71.请参见图5,在本实施例中,所述装卸机构30还包括锁止件35,所述锁止件35包括本体部351及锁止销352。所述本体部351固定设置于所述活动座331上,所述锁止销352可活动地设置于所述本体部351。所述第一部分332a设有锁止孔333c,当所述锁止件35转动至于预定位置时(该预定位置包括所述第二部分332b钩住所述载具上的孔),所述锁止销352可对应所述锁止孔333c,所述锁止销352可以伸入所述锁止孔333c内以防止所述挂钩件332转动。具体地,当所述物料转运车100正在通过所述挂钩件332拉动装载硬质合金烧结半成品的载板38时,转动所述锁止件35至预定位置,为了防止脱钩,所述锁止销352便伸入所述锁止孔333c内;当载板38被拉动至合适位置时,将所述锁止销352退出所述锁止孔333c,转动所述第一部分332a,实现所述第二部分332b与载板38的脱钩。可以理解地,如果所述第二部分332b与该载具的连接稳固可靠,托钩的风险较小,则所述锁止件35可以省略。
72.请参见图1或图2,在本实施例中,所述控制器24还电性连接所述电机32以控制所
述电机32的启动与停止。所述物料转运车100还包括操作盒50,所述操作盒50可拆卸地设置于所述升降架21,所述操作盒50包括壳体51及设置于所述壳体51内的多个开关52,每一所述开关52电性连接所述控制器24。所述开关52包括控制所述液压缸22的上升开关(图未示)及下降开关(图未示),以及控制所述电机32的装料开关(图未示)及卸料开关(图未示),所述开关52提供了额外的人工操作按键,从而增加了工人操作的灵活性。另外,所述操作盒50可以通过长导线或者无线的方式连接所述控制器24,使得操作者可以手持该操作盒50移动至装卸或者升降操作的最佳视野区,降低装卸或者升降过程中发生意外的风险。
73.请参见图1或图2,在本实施例中,所述车架10包括底架11、车头12、操作臂13及多个滑轮14。所述车头12设置于所述底架11的一端以围成容置空间r,所述升降架21的固定设置于所述容置空间r内。所述滑轮14设置于所述底架11背离所述容置空间r的一侧,所述滑轮14用于方便所述物料转运车100在地面移动。所述操作臂13设置于所述车头12背离所述容置空间r的一侧,所述操作臂13用于方便操作者拖动所述物料转运车100。
74.请参见图1或图2,在本实施例中,所述储能电池40设置于所述车头12内,所述感测件23设置于所述载料台36远离所述车头12的一端。所述储能电池40电性连接所述液压缸22、所述感测件23、所述电机32及所述控制器24,以给所述液压缸22、所述电机32,所述感测件23及所述控制器24提供电能。
75.上文中,参照附图描述了本技术的具体实施方式。但是,本领域中的普通技术人员能够理解,在不偏离本技术的精神和范围的情况下,还可以对本技术的具体实施方式作各种变更和替换。这些变更和替换都落在本技术所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1