钻屑取料装置的制作方法
1.本实用新型涉及石油工程技术领域,具体地涉及一种钻屑取料装置。
背景技术:
2.近年来,石油钻井工程对自身的安全与环保的要求逐渐提高。钻井过程中将废弃泥浆及钻屑等钻井废弃物未经处理直接排放到占地较大的泥浆池进行就地固化掩埋的方式已不能满足当前石油钻井工程对安全与环保的要求。
3.现在,在钻井施工中主要采用钻屑不落地工艺和高性能固液分离的固控一体化工艺。通过上述的两种工艺方式均能够将从井内上返的固液混合物进行固液分离,将分离后的固相废弃物集中放置到收集罐中,再将收集罐运输到指定地点进一步完成无害化处理和资源化的利用。但是,完成上述的工艺需要由多个专业的部门组成的浩大工程才能实现。这样,就会导致掩埋的成本巨大,并且在运输过程中还会存在严重的安全隐患。
4.然而,现有技术中仍没有能够解决上述问题的装置。
技术实现要素:
5.本实用新型的目的在于提出一种钻屑取料装置,其能够与作为钻屑源的钻井固控单元融为一体,从而通过控制机构实现对收集单元和搬运单元的远程操作,进一步完成钻屑的取料与装料的工作。本实用新型不仅能够有效地降低取料作业的安全隐患,还能够提高工作效率。此外,本实用新型的动力系统均以电驱动方式进行,一方面能够有效降低对自然环境的污染;另一方能够降低噪音污染。
6.根据本实用新型,提供了一种钻屑取料装置,包括收集单元,所述收集单元包括与钻屑源连接并用于接收钻屑的第一收集罐和第二收集罐,以及设置在所述第一收集罐与所述第二收集罐之间的支撑机构;以及搬运单元,所述搬运单元包括与所述支撑机构连接的连杆机构、设置在所述连杆机构上的液压缸,以及与所述连杆机构连接的料斗组件;控制机构,其与所述支撑机构和所述液压缸均连接,其中,所述控制机构构造成能够通过所述支撑机构而使所述连杆机构转动;所述料斗组件构造成能够在所述连杆机构的作用下运动到所述第一收集罐或所述第二收集罐的上方,并且在所述液压缸的作用下从所述第一收集罐或所述第二收集罐中取料。
7.在一个实施例中,所述连杆机构包括构造成l型的第一伸缩杆,所述第一伸缩杆的连接端与所述支撑机构连接,所述第一伸缩杆构造成能够在控制机构的作用下根据所述第一收集罐或所述第二收集罐中的取料位置而进行伸缩。
8.在一个实施例中,所述连杆机构还包括第二伸缩杆,所述第二伸缩杆的一端与所述第一伸缩杆连接,另一端与所述料斗组件连接。
9.在一个实施例中,所述第二伸缩杆与所述第一伸缩杆通过铰链轴连接。
10.在一个实施例中,所述液压缸的一端与所述第一伸缩杆连接,另一端与所述第二伸缩杆连接,所述液压缸构造成能够通过所述第二伸缩杆而驱动所述料斗组件沿第一方向
运动而进入收集罐,或沿与第一方向相反的第二方向运动而离开收集罐。
11.在一个实施例中,所述料斗组件包括弯曲状的第一连接件,以及平板状的第二连接件,其中,所述第一连接件与所述第二伸缩杆连接。
12.在一个实施例中,所述支撑机构通过连杆与所述第一收集罐和所述第二收集罐形成接合。
13.在一个实施例中,所述支撑机构包括与所述连杆连接的固定座,以及设置在所述固定座内且与所述连杆机构连接的旋转座,所述旋转座构造成能够将所述料斗组件从所述第一收集罐运送至所述第二收集罐或从所述第二收集罐运送至所述第一收集罐。
14.在一个实施例中,控制机构包括手持控制器,以及手柄遥控器,其中,所述手持控制器和所述手柄遥控器均为远程无线控制器。
15.在一个实施例中,所述钻屑源为钻井固控单元。
附图说明
16.下面将结合附图来对本实用新型进行详细地描述,在图中:
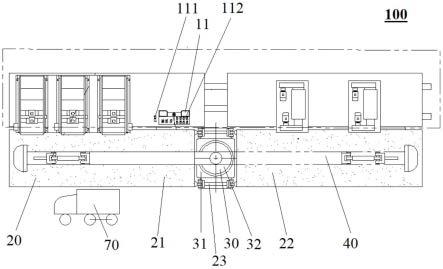
17.图1为根据本实用新型的钻屑取料装置的俯视图;
18.图2为根据本实用新型的钻屑取料装置的正视图。
19.在附图中,相同的部件使用相同的附图标记。附图并未按照实际的比例绘制。
具体实施方式
20.下面将结合附图对本实用新型做进一步说明。
21.图1为根据本实用新型的钻屑取料装置100的俯视图。如图1所示,根据本实用新型的钻屑取料装置100主要包括收集单元20、搬运单元40以及控制机构11。控制机构11构造成能够控制收集单元20中的支撑机构30(在下文中介绍)与搬运单元40中的液压缸41(在下文中介绍),从而能够实现钻屑取料装置100的自动取料。其具体内容在下文中介绍。
22.根据本实用新型,如图1所示,收集单元20包括第一收集罐21和第二收集罐22。其中,第一收集罐21与第二收集罐22均与钻屑源直接连接,用于接收钻屑。优选地,第一收集罐21与第二收集罐22均构造成方形储屑槽。这样,使得料斗组件50(在下文中介绍)能够在第一收集罐21或第二收集罐22中更容易地进行取料。根据本实用新型的一个实施例,钻屑源为钻井固控单元。钻井固控单元构造成能够直接接收钻井过程中井筒上返的固液混合物,然后将经过分离得到的钻屑输送至第一收集罐21或第二收集罐22中。
23.根据本实用新型,如图1所示,收集单元20还包括支撑机构30。支撑机构30设置在第一收集罐21与第二收集罐22之间。支撑机构30通过连杆23与第一收集罐21和第二收集罐22形成接合。通过这种方式,使得钻屑取料装置100能够在取料的过程中始终保持稳定工作状态,从而提高钻屑取料装置100在取屑作业中的安全性。
24.根据本实用新型的一个实施例,支撑机构30还与搬运单元40连接。支撑机构30能够在控制机构11的作用下带动搬运单元40在水平方向上转动。具体地说,支撑机构30能够将搬运单元40从第一收集罐21的上方运送至第二收集罐22的上方或者从第二收集罐22的上方运送至第一收集罐21的上方。根据本实用新型的一个实施例,支撑机构30的最大旋转角度为180度。这样,使得料斗组件50在第一收集罐21或第二收集罐22中能够提取更多的钻
屑。
25.图2为根据本实用新型的钻屑取料装置100的正视图。根据本实用新型,如图2所示,搬运单元40包括连杆机构60。连杆机构60与支撑机构30连接。连杆机构60包括第一伸缩杆61。第一伸缩杆61构造成l型,其中,较短的一节与支撑机构30连接,较长的一节向外伸出至第一收集罐21或第二收集罐22的上方。
26.根据本实用新型的一个实施例,第一伸缩杆61能够在控制机构11的作用下根据第一收集罐21或第二收集罐22中的取料位置进行选择性的伸缩。通过这种方式,使得钻屑取料装置100能够更快地运动到第一收集罐21或第二收集罐22中的取料位置处,从而有效地提高了装置整体的工作效率。
27.根据本实用新型,如图2所示,连杆机构60还包括第二伸缩杆62。第二伸缩杆62构造成直筒状。第二伸缩杆62与第一伸缩杆61通过铰链轴连接。优选地,第二伸缩杆62铰接在第一伸缩杆61上。这样,第二伸缩杆62能够在第一伸缩杆61的控制下自由活动,从而有助于钻屑取料装置100的完成取料作业。
28.在本实用新型的一个实施例中,第一伸缩杆61与第二伸缩杆62均能够在支撑机构30的作用下从第一收集罐21运送至第二收集罐22或者从第二收集罐22运送至第一收集罐21。
29.根据本实用新型,如图2所示,搬运单元40还包括液压缸41。液压缸41与连杆机构60连接。具体地说,液压缸41的一端与第一伸缩杆61连接,而另一端与第二伸缩杆62连接。优选地,液压缸41为电驱液压缸。这样,液压缸41能够在钻井现场直接取电以进行在井上的取屑作业。相比于用燃油作为运输车70的主要续航方式来说,这样能够有效地降低对大气环境的污染。此外,采用电驱动相比于燃油驱动所产生的噪音会更小,从而提高对现场施工人员的安全保障。
30.根据本实用新型的一个实施例,液压缸41能够在控制机构11的作用下使第二伸缩杆62沿第一方向运动而进入到收集罐(指的是第一收集罐21或第二收集罐22)中或沿与第一方向相反的第二方向运动而离开收集罐。液压缸的结构与工作原理是本领域技术人员所熟知的,因此不再赘述。
31.在图示实施例中,第一方向为逆时针方向。然而可以理解,根据具体结构的发生的,第一方向也可以为顺时针方向。
32.根据本实用新型,如图2所示,搬运单元40还包括料斗组件50。料斗组件50与第二伸缩杆62连接。这样,料斗组件50在第二伸缩杆62通过液压缸41的驱动作用而沿第一方向进入到收集罐中至沿第二方向离开收集罐的过程中能够进行取料。具体地说,料斗组件50能够在液压缸41与第二伸缩杆62的共同作用下沿第一方向进入第一收集罐21或第二收集罐22中进行取料;料斗组件50能够在液压缸41与第二伸缩杆62的共同作用下沿第二方向离开第一收集罐21或第二收集罐22,进一步地将收集的钻屑运送至外部的运输车70中。
33.根据本实用新型,如图2所示,料斗组件50包括第一连接件51和第二连接件52。其中,第一连接件51构造成曲面结构,并且与第二伸缩杆62固定连接。第二连接件52构造成板状结构,第一连接件51与第二连接件52的组合形成为斗状结构,从而能够更容易地一次性装载更多的钻屑,进而提高了钻屑取料装置100地工作效率。
34.根据本实用新型,如图1和2所示,支撑机构30包括固定座31以及设置在固定座31
内的旋转座32。优选地,固定座31构造成方形结构。通过这种方式,有效地增大了固定座31与地面的接触面积,使得支撑机构30能够更牢固的安装在地面上,从而有效地保障了搬运单元40在取料过程中的安全。旋转座32与如上所述的第一伸缩杆61中较短的一节固定连接。这样,在控制机构11的作用下,搬运单元40能够更快地转动到第一收集罐21或第二收集罐22。
35.根据本实用新型,如图1所示,控制机构11包括手持控制器111和手柄遥控器112。优选地,手柄遥控器112为带触摸屏的手柄遥控器112。这样,操作的时候就能够根据触摸屏内的实时现场画面,从而对钻屑取料装置100进行控制以完成取料作业。其中,手持控制器111与手柄遥控器112均能够控制旋转座32、第一伸缩杆61以及液压缸41以实现上述的旋转、升降等功能。在本实用新型的一个实施例中,手持控制器111和手柄遥控器112均设置为无线控制器,从而实现对钻屑取料装置100的远程操作。由于手持控制器111和手柄遥控器112均能够在远离施工现场处使用,从而有效地提高钻屑取料装置100在取料作业过程中的安全系数。
36.根据本实用新型的钻屑取料装置100,其能够与作为钻屑源的钻井固控单元融为一体,从而通过控制机构11实现对收集单元20和搬运单元40的远程操作,进一步完成钻屑的取料与装料的工作。这样,不仅能够有效地降低钻屑取料装置100在取料过程中的安全隐患,还能够提高工作效率。另外,由于钻屑取料装置100的动力系统均以电驱动来替代燃油的方式进行,一方面能够有效降低对自然环境的污染;另一方还能够降低噪音污染。此外,本实用新型能够极大程度的优化人员配置,从而降低生产成本。
37.以上仅为本实用新型的优选实施方式,但本实用新型的保护范围并不局限于此。本领域的技术人员在本实用新型的公开范围内,可容易地进行改变或变化,而这种改变或变化都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1