一种步进式掰玻璃机的制作方法
1.本实用新型属于玻璃加工技术领域,尤其涉及一种步进式掰玻璃机。
背景技术:
2.玻璃目前工业中大量应用的工业产品,例如建筑行业中玻璃和电子产品中的光学玻璃。玻璃在生产的过程中都是需要通过切割加工成形的。例如,在光学玻璃的加工过程中,是将一整体结构的玻璃切割成单片的玻璃,再对单片的玻璃加工,从而得到玻璃的成品。整张的玻璃在切割加工后,由输送线输送到掰断机构的位置,并且由定位机构对玻璃进行定位,定位后将玻璃压紧,再由掰断机构的挤压在玻璃上,达到将玻璃掰断,玻璃掰断后,再由输送皮带将玻璃输送,并由定位机构定位后再次将玻璃掰断。然而在对玻璃不断地输送、定位、压紧和掰断,会导致玻璃掰断的动作过多,而降低掰玻璃的效率。
技术实现要素:
3.本实用新型的目的在于提供一种步进式掰玻璃机,解决目前的玻璃掰断效率低的问题。
4.为实现上述目的,本实用新型实施例提供的一种步进式掰玻璃机,包括输送线、支撑板、下压机构和玻璃拾取机构;支撑板设置在输送线的输入端、且高于输送线的输送面;玻璃拾取机构用于吸起玻璃在支撑板上步进式移动;下压机构设置支撑板的上方,用于掰断支撑在支撑板上的玻璃。玻璃拾取机构包括两组电动直线模组、连接座、升降组件和吸附框;两组的电动直线模组设置在支撑板的两侧,各电动直线模组的移动座上均设置有连接座,连接座上设置有升降组件,吸附框连接两升降组件的升降端,吸附框内设置有多件的横梁,相邻的横梁之间设有避空间距;各横梁的底部设置有吸附孔,吸附孔连接负压机构。
5.进一步,下压机构包括安装架、安装座、电动丝杆和下压板;安装架连接在输送线上,安装座设置在安装架上、且位于输送线的上方;电动丝杆设置在安装座上,下压板滑动连接在安装座的一侧、且连接电动丝杆,推动下压板上下地滑动。
6.进一步,下压板底端还设置有弹性胶块。
7.进一步,还包括拾取旋转机构、第二输送线、垫板和掰片下压机构;第二输送线设置在输送线的尾端,垫板设置在第二输送线的输入端、且高于第二输送线的输送面;拾取旋转机构用于拾取输送线上的玻璃条旋转90
°
的放置在垫板上,掰片下压机构设置在第二输送线的上方,用于掰断垫板上的玻璃。
8.进一步,拾取旋转机构包括两组第二电动直线模组、移动梁、直线机构、安装座、升降机构、电动转盘和多件的吸附板;两组的第二电动直线模组分别设置在输送线的两侧,移动梁连接连两第二电动直线模组的移动端,直线机构设置在移动梁上,安装座连接直线机构的移动端,升降机构连接安装座,电动转盘设置在升降机构的底端,多件的吸附板并列的设置在电动转盘的底端;吸附板的底部分布多个的吸气孔,吸气孔与吸气机构连接。
9.进一步,掰片下压机构包括安装梁、电动丝杆组件和推压板;安装梁设置在第二输
送线的上方,电动丝杆组件纵向地设置在安装梁上,电动丝杆组件的移动端连接推压板,推压板向下延伸有多个的压爪;第二输送线的尾端设置有输送线或玻璃的其他加工设备或层叠机。
10.进一步,各压爪靠近垫板的一侧还设置有吹气管,吹气管的出气端倾斜朝下。
11.进一步,垫板的两侧还设置平移板,用于限位两侧的玻璃条,平移板连接平移机构。
12.本实用新型实施例提供的步进式掰玻璃机中的上述一个或多个技术方案至少具有如下技术效果:
13.由吸附框中的横梁底部产生负压,并且每一横梁吸附一片或者同一横排的玻璃片,电动直线模组驱动连接座和吸附框等整体一起移动,使得玻璃能够支撑在支撑板上,由下压机构穿过横梁之间的间距与玻璃接触,因此可以将玻璃掰断,在玻璃掰断后,则电动直线模组再次驱动吸附框和玻璃整体移动,使得下压机构能继续完成下一玻璃掰断工作,代替了传统由输送皮带输送到定位的位置定位后,通过压紧机构将玻璃限位住后进行掰断,使得玻璃掰断的工序更简单了,进而可以有效地提高玻璃掰断的效率。
附图说明
14.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
15.图1为本实用新型实施例提供的步进式掰玻璃机的的结构图。
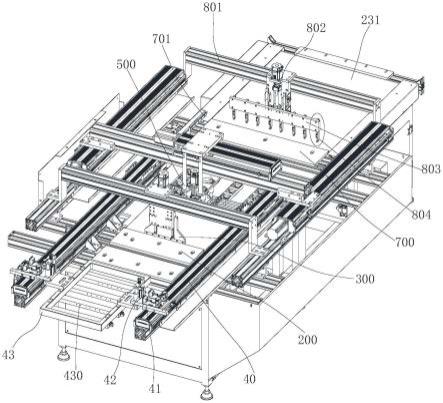
16.图2为本实用新型实施例提供的步进式掰玻璃机另一侧的结构图。
17.图3为图2的局部放大图。
18.图4为本实用新型实施例提供的步进式掰玻璃机的下压机构的结构图。
19.图5为本实用新型实施例提供的步进式掰玻璃机的拾取旋转机构的结构图。
具体实施方式
20.下面详细描述本实用新型的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型的实施例,而不能理解为对本实用新型的限制。
21.在本实用新型实施例的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
22.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型实施例的描述中,“多个”的含义是两个
或两个以上,除非另有明确具体的限定。
23.在本实用新型实施例中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型实施例中的具体含义。
24.在本实用新型的一个实施例中,参照图1和图2,步进式掰玻璃机,包括输送线100、支撑板200、下压机构300和玻璃拾取机构400。支撑板200设置在输送线100的输入端、且高于输送线100的输送面。玻璃拾取机构400用于吸起玻璃在支撑板200上步进式移动。下压机构300设置支撑板200的上方,用于掰断支撑在支撑板200上的玻璃。
25.参照图1和图2,玻璃拾取机构400包括两组电动直线模组40、连接座41、升降组件42和吸附框43。两组的电动直线模组40设置在支撑板200的两侧,各电动直线模组40的移动座上均设置有连接座41,连接座41上设置有升降组件42,吸附框43连接两升降组件42的升降端。吸附框43内设置有多件的横梁430,相邻的横梁430之间设有避空间距。各横梁430的底部设置有吸附孔,吸附孔连接负压机构(附图未示)。由吸附框43中的横梁430底部产生负压,并且每一横梁430吸附一片或者同一排的玻璃片,电动直线模组40驱动连接座41和吸附框43等整体一起移动,并使得玻璃能够支撑在支撑板200上,由下压机构300穿过横梁430之间的间距与玻璃接触,因此可以将玻璃掰断,掰断的玻璃或者玻璃条通过输送线100往下一工位输送。在玻璃掰断后,则电动直线模组40再次驱动吸附框43和玻璃整体移动,使得下压机构300能继续完成下一玻璃掰断工作,因此代替了传统由输送皮带输送到定位的位置定位后,通过压紧机构将玻璃限位住后进行掰断,使得玻璃掰断的工序更简单了,进而可以有效地提高玻璃掰断的效率。
26.进一步,参照图4,下压机构300包括安装架301、安装座302、电动丝杆303和下压板304。安装架301连接在输送线100上,安装座302设置在安装架301上、且位于输送线100的上方。电动丝杆303设置在安装座302上,下压板304滑动连接在安装座302的一侧、且连接电动丝杆303,推动下压板304上下地滑动。在本实施例中,下压机构300将玻璃掰断时,电动丝杆303驱动下压板304向下移动,下压板304将玻璃掰断。
27.进一步,下压板304底端还设置有弹性胶块305。本实施例中,通过弹性胶块305可以对玻璃起到缓冲作用,避免撞击玻璃而导致玻璃碎裂,达到对玻璃起到保护作用。
28.进一步,请参照图1和图2,本实施例的步进式掰玻璃机还包括拾取旋转机构500、第二输送线600、垫板700和掰片下压机构800。第二输送线600设置在输送线100的尾端,垫板700设置在第二输送线600的输入端、且高于第二输送线600的输送面。拾取旋转机构500用于拾取输送线100上的玻璃条旋转90
°
的放置在垫板700上,掰片下压机构800设置在第二输送线600的上方,用于掰断垫板700上的玻璃。在整张的玻璃被掰断成玻璃条掉落在输送带100上时,由拾取旋转机构500将所有横向的玻璃条吸起,并旋转90
°
使得玻璃纵向地朝下掰片下压机构800,并支撑在垫板700上,由掰片下压机构800将玻璃条掰断成单片的玻璃,并掉落在第二输送线600上,由第二输送线600带动玻璃往下一工位输送。
29.进一步,参照图5,拾取旋转机构500包括两组第二电动直线模组501、移动梁502、直线机构503、安装座504、升降机构505、电动转盘506和多件的吸附板507。两组的第二电动
直线模组501分别设置在输送线100的两侧,移动梁502连接连两第二电动直线模组501的移动端,直线机构503设置在移动梁502上,安装座504连接直线机构503的移动端,升降机构505连接安装座504,电动转盘506设置在升降机构505的底端,多件的吸附板507并列的设置在电动转盘506的底端;吸附板507的底部分布多个的吸气孔,吸气孔与吸气机构(附图未示)连接。在本实施例中,由升降机构505驱动电动转盘506和吸附板507下降,使得各个吸附板507都能单独地吸附一条的玻璃条,再由电动转盘506驱动各个吸附板507旋转90
°
,并通过直线机构503调整玻璃条整体的位置,再由第二电动直线模组501逐步的驱动玻璃条移动到掰片下压机构800的底端完成玻璃掰片。
30.进一步,参照图3,掰片下压机构800包括安装梁801、电动丝杆组件802和推压板803。安装梁801设置在第二输送线600的上方,电动丝杆组件802纵向地设置在安装梁801上,电动丝杆组件802的移动端连接推压板803,推压板803向下延伸有多个的压爪804;第二输送线600的尾端设置有输送线或玻璃的其他加工设备或层叠机。在本实施例中,由拾取旋转机构500吸起的玻璃条均放置在垫板700上,并由吸附板507将玻璃条限位在垫板700上,由电动丝杆组件802驱动推压板803下降,推压板803上的各个压爪804压在对应的玻璃上,进而将玻璃掰断,掰断后掉落到第二输送线600上,并输送到下一工位。在每掰断一组玻璃片后,由吸附板507带动玻璃条移动一片玻璃的距离。进而完成所有的玻璃条掰片。
31.进一步,参照图3,各压爪804靠近垫板的一侧还设置有吹气管805,吹气管805的出气端倾斜朝下,因此吹气管805可以向下吹气,将玻璃条压紧在垫板700上。
32.进一步,参照图2,垫板700的两侧还设置平移板701,用于限位两侧的玻璃条,平移板连接平移机构。通过平移机构推动两平移板701靠拢地移动,进而对玻璃条定位。
33.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1