真空设备的制作方法
1.本公开涉及包括基板移送部的真空设备,更具体而言涉及在内部具备可排出完成品的基板移送部的真空设备。
背景技术:
2.作为平板显示装置,公知有液晶显示装置(liquid crystal display:lcd)、等离子显示装置(plasma display panel:pdp)、有机发光显示装置(organic light emitting diode device:oled device)、场效应显示装置(field effect display:fed)、电泳显示装置(electrophoretic display device)等。
3.随着开发出包括平板显示装置的各种电子设备,形成平板显示装置的基板的大小也变得多样化。此外,在平板显示装置用制造设备中所使用的基板使用相加了多个平板显示装置用基板的大尺寸的母基板来形成各层,并且执行附着膜等的工序。如上所述的大尺寸的基板具有移送时需要注意并且制造基板时工序时间长的缺点。
技术实现要素:
4.各实施例用于提供一种可以缩短工序时间的包括基板移送部的真空设备。
5.一实施例涉及的真空设备包括:下部腔体;上部腔体,与所述下部腔体结合而形成真空状态;以及基板移送部,至少一部分位于所述下部腔体内,并且将基板排出至所述下部腔体之外,所述基板移送部包括:旋转部,位于所述下部腔体的内部;一对宽度调节部,与所述旋转部连接;以及一对臂部,所述一对臂部中的一个臂部与所述一对宽度调节部中的一个宽度调节部连接,并且所述一对臂部中的另一个臂部与所述一对宽度调节部中的另一个宽度调节部连接。
6.可以是,所述基板移送部还包括:真空维持部,与所述下部腔体的下部面密接;以及多个吸附部,位于所述一对臂部的一侧末端,所述旋转部与所述真空维持部连接,所述旋转部使接合了位于所述下部腔体的下部材料和位于所述上部腔体的上部材料的所述基板旋转来将其排出至外部。
7.可以是,所述基板移送部还包括:支承柱,位于所述真空维持部的内部;以及第一主体,与所述支承柱的末端连接,并且支承所述旋转部。
8.可以是,所述基板移送部还包括:一对上下移动部,分别位于所述第一主体的两末端,从而使所述基板移送部上下移动。
9.可以是,所述一对臂部分别包括:第一连接部,与所述一对宽度调节部中的相应的宽度调节部连接;以及吸附部支承杆,与所述多个吸附部紧固连接而进行支承。
10.可以是,所述一对宽度调节部分别包括:缸体,进行线性运动;以及操作部,根据所述缸体的操作调节所述操作部的长度,并且所述操作部的末端具有以圆形结构扩展的宽度。
11.可以是,所述操作部与所述第一连接部连接,并且在所述操作部与所述第一连接
部之间形成有间隙。
12.可以是,所述间隙在0.1mm以上且在0.3mm以下。
13.可以是,所述基板移送部还包括:第二主体,位于所述旋转部与所述一对宽度调节部之间。
14.可以是,所述基板移送部还包括:引导部,位于所述第二主体上,并且包括轨道。
15.可以是,所述一对臂部分别还包括与所述引导部连接的第二连接部。
16.可以是,所述基板移送部中的所述旋转部、所述一对宽度调节部、所述一对臂部、所述多个吸附部、所述第一主体、所述第二主体、所述一对上下移动部和所述引导部位于所述下部腔体内。
17.一实施例涉及的真空设备包括:下部腔体;上部腔体,与所述下部腔体结合而形成真空状态;以及基板移送部,至少一部分位于所述下部腔体内,并且将基板排出至所述下部腔体之外,所述基板移送部包括:旋转部,位于所述下部腔体的内部;以及臂部,与所述旋转部连接,并且具有被弯曲的线性结构。
18.可以是,所述臂部具有被弯曲的线性杆结构。
19.可以是,所述基板移送部还包括:真空维持部,与所述下部腔体的下部面密接;多个吸附部,位于所述臂部的一侧末端;以及上下移动部,连接所述旋转部与所述臂部,并且使所述臂部进行上下线性运动,所述旋转部与所述真空维持部连接。
20.可以是,所述基板移送部还包括:支承柱,位于所述真空维持部的内部;以及主体,与所述支承柱的末端连接,并且支承所述旋转部。
21.可以是,所述多个吸附部吸附位于所述下部腔体的下部材料和位于所述上部腔体的上部材料被接合的所述基板的中央部,并且所述基板移送部使所吸附的所述基板旋转来将其排出至外部。
22.一实施例涉及的真空设备包括:下部腔体;上部腔体,与所述下部腔体结合而形成真空状态;以及基板移送部,至少一部分位于所述下部腔体内,并且将基板排出至所述下部腔体之外,所述基板移送部具有一对线性移送部,所述一对线性移送部分别包括:主体,位于所述下部腔体的内部;第一宽度调节部和第二宽度调节部,与所述主体连接;以及臂部,与所述第一宽度调节部的末端连接。
23.可以是,所述一对线性移送部分别还包括:真空维持部,与所述下部腔体的下部面密接;多个吸附部,位于所述臂部的一侧末端;以及一对上下移动部,与所述主体连接,并且使所述主体上下移动,所述主体与所述真空维持部连接。
24.可以是,所述第一宽度调节部和所述第二宽度调节部中的至少一个包括缸体。
25.(实用新型效果)
26.根据各实施例,可以将基板移送部形成在真空设备的内部,从而若真空设备被打开则快速排出并移送接合了上部材料和下部材料的基板,由此可以缩短工序时间。此外,可以快速排出已接合的基板,从而后续可以向真空设备快速传递上部材料和下部材料,由此可以缩短整体的工序时间。
附图说明
27.图1和图2是一实施例涉及的真空设备的示意图。
28.图3是一实施例涉及的基板移送部的操作说明图。
29.图4和图5是从一实施例涉及的真空设备分别传递上部材料和下部材料的传递部的示意图。
30.图6是一实施例涉及的基板移送部的立体图。
31.图7至图14是表示图6的实施例涉及的基板移送部的各部分的图。
32.图15是表示图6的实施例涉及的基板移送部的操作的图。
33.图16是又一实施例涉及的基板移送部的立体图。
34.图17是表示图16的实施例涉及的基板移送部的操作的图。
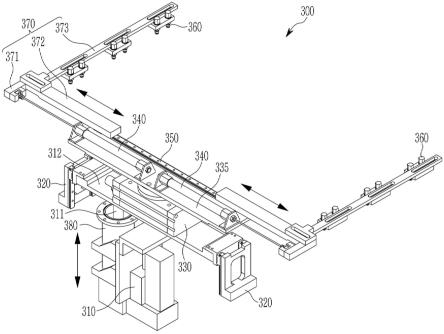
35.图18是又一实施例涉及的基板移送部的立体图。
36.图19是表示图18的实施例涉及的基板移送部的操作的图。
37.符号说明:
38.100:下部腔体;200:上部腔体;400:上部材料传递部;500:下部材料传递部;450:轨道;30:基板;40:上部材料;50:下部材料;300、300-1、300-2:基板移送部;310:驱动部;310-1、310-2:主体;311:支承柱;312:第一主体;320、320-1、320-2:上下移动部;321:线性电机部;322:支承部;330、330-1:旋转部;331:旋转缸体;332:支承部;335:第二主体;340、340-1、340-2:宽度调节部;341:缸体;342:操作部;350:引导部;351:轨道;352:多个移动部;360、360-1、360-2:吸附部;361:主体;362:吸附口;370、370-1、370-2:臂部;371:第一连接部;372:第二连接部;373:吸附部支承杆;374、375:槽;380:伸缩管;600:视觉部;g:间隙。
具体实施方式
39.以下,参照附图,详细说明本实用新型的各实施例,使得本领域技术人员能够容易实施。本实用新型可以由各种不同的形态实现,并不限于在此说明的各实施例。
40.为了明确说明本实用新型,省略了与说明无关的部分,并且在整个说明书中对相同或类似的构成要素赋予相同的符号。
41.此外,在附图中,为了便于说明,任意示出各构成的大小和厚度,本实用新型并不一定限于图示的情况。在附图中,为了明确表示各层和区域而放大示出了厚度。此外,在附图中,为了便于说明,夸张地示出了部分层和区域的厚度。
42.此外,层、膜、区域、板等部分位于其他部分上或者上方时,不仅包括直接位于其他部分上的情况,还包括其间存在其他部分的情况。相反,某一部分直接位于其他部分上时,表示其间不存在其他部分。此外,位于成为基准的部分上或者上方是指位于成为基准的部分上或者下,并不一定表示朝向重力的相反方向位于上或者上方。
43.此外,在整个说明书中,某一部分包括某一构成要素时,在没有特别相反记载的情况下并不是排除其他构成要素,而是表示还可以包括其他构成要素。
44.此外,在整个说明书中,“平面上”是指俯视对象部分的情况,“截面上”是指从侧方观察垂直截取对象部分的截面的情况。
45.以下,通过图1至图5,观察整体的真空设备。
46.图1和图2是一实施例涉及的真空设备的示意图,图3是一实施例涉及的基板移送部的操作说明图,图4和图5是从一实施例涉及的真空设备分别传递上部材料和下部材料的传递部的示意图。
47.一实施例涉及的真空设备大体上包括下部腔体100和上部腔体200。
48.若结合下部腔体100和上部腔体200,则内部被密闭且抽空空气,从而具有内部真空状态。在真空状态下,真空设备可以对内部的基板进行各种工序。在一实施例涉及的真空设备中,可以进行接合上部材料与下部材料的工序。在真空设备中进行的工序例如可以是在形成有晶体管、电容器等的基板的一侧面形成粘接层的工序、或者在附着有粘接层的基板附着窗部的工序。在基板形成粘接层的工序中,可以作为上部材料而引入基板,并且可以作为下部材料而引入粘接层。另一方面,附着窗部的工序的情况下,作为上部材料而引入窗部,并且作为下部材料而引入附着有粘接层的基板。对于进行了接合上部材料与下部材料而被排出至真空设备之外的工序的基板而言,在基板形成粘接层的工序中可以是附着了粘接层的基板,而在附着窗部的工序中可以是附着了窗部的基板。
49.图1的实施例涉及的上部腔体200可以形成为包括窗而可以确认内部的真空状态和工序状态。
50.参照图2,上部腔体200具有可以向上部提起的结构,朝向上部打开而真空状态被破坏,变成可以向外部排出内部的基板30的状态。
51.在真空设备之内形成有用于排出进行了工序的基板30的基板移送部300。更具体而言,基板移送部300位于一实施例涉及的真空设备的下部腔体100内。
52.基板移送部300可以位于真空状态的真空设备内,从而在真空设备的真空被破坏之前或者真空被破坏的同时开始进行操作,由此可以进行吸附基板30并将其排出的操作。如上所述,可以预先通过基板移送部300开始排出进行了工序的基板30,从而可以减少整体的工序时间。根据实施例,也可以设置成在真空状态被破坏之后,基板移送部300开始进行操作。
53.参照图3,一实施例涉及的基板移送部300可以通过吸附进行了工序的基板30的方式将基板30抬起并使其旋转,从而从表示为30-1的原本的位置排出至真空设备之外。通过后述的图6至图19观察基板移送部300的结构。
54.如图3所示,将进行了工序的基板30排出的真空设备如图4和图5所示那样,上部材料传递部400将上部材料40传递至真空设备内,并且下部材料传递部500将下部材料50传递至真空设备内。
55.如图4和图5所示,上部材料传递部400和下部材料传递部500位于真空设备的外部。上部材料传递部400和下部材料传递部500可以分别具有沿着轨道450移动而靠近真空设备的结构。
56.上部材料传递部400可以通过使上部材料40位于上侧而沿着轨道450靠近真空设备之后朝向上部腔体200推上部材料40并将其抬起的方式,向上部腔体200内提供上部材料40。
57.下部材料传递部500可以通过使下部材料50位于下侧而沿着轨道450靠近真空设备之后朝向下部腔体100推下部材料50并将其放下的方式,向下部腔体100内提供下部材料50。
58.若通过上部材料传递部400和下部材料传递部500而上部材料40和下部材料50被传递至上部腔体200和下部腔体100,则视觉部600使上部材料40和下部材料50的位置对齐,从而在最终接合为基板30时不会产生误对齐。
59.图1至图5基于真空设备的工序顺序排列了图。即,图1是进行如下的工序的图,即,真空设备的下部腔体100和上部腔体200被附着而内部具有真空状态,从而在真空状态下接合上部材料40与下部材料50来形成最终完成的基板。图2表示如下的状态,即,在完成接合了上部材料40与下部材料50的基板30之后,分离下部腔体100与上部腔体200,从而真空被破坏。图3表示如下的状态,即,将接合了上部材料40与下部材料50的基板30通过基板移送部300排出至真空设备之外。图4和图5表示如下的状态,即,为了下一工序,向真空设备的下部腔体100和上部腔体200分别提供下部材料50和上部材料40。
60.在如上所述的真空设备中,可以同时提供下部材料50与上部材料40,从而可以缩短工序时间。此外,通过位于真空设备内的基板移送部300,可以将结束了工序的基板30直接排出至真空设备之外,从而可以快速向真空设备提供将在下一工序中使用的下部材料50和上部材料40,从而可以缩短工序时间。
61.以下,通过图6至图19,观察位于真空设备内的基板移送部的各种实施例以及详细结构及操作。
62.首先,通过图6至图15,观察图2和图3所示的基板移送部300的结构和操作。
63.图6是一实施例涉及的基板移送部的立体图,图7至图14是表示图6的实施例涉及的基板移送部的各部分的图,图15是表示图6的实施例涉及的基板移送部的操作的图。
64.通过图6观察的一实施例涉及的基板移送部300的示意性结构如下。
65.一实施例涉及的基板移送部300可以包括驱动部310、上下移动部320、旋转部330、宽度调节部340、吸附部360、臂部370以及伸缩管380。
66.驱动部310可以使基板移送部300整体工作,进行驱动使得基板移送部300整体上下移动。驱动部310可以提供电源使得基板移送部300的各部分工作。驱动部310位于真空设备的外部,从而不位于真空内。驱动部310通过支承柱311而与第一主体312连接。在此,第一主体312可以位于真空设备内,并且支承柱311的至少一部分可以位于真空设备内。第一主体312位于支承柱311的上侧末端,第一主体312水平地延伸而具有杆类型结构。一对上下移动部320位于第一主体312的两侧末端。
67.一对上下移动部320可以包括使第一主体312在上下方向上移动的电机,并且可以包括通过电机的工作而沿着如轨道这样的引导件而上下移动的部分。一对上下移动部320可以被固定于下部腔体100的内部底面,从而可以变更从下部腔体100的内部底面至第一主体312的高度。在一对上下移动部320上下移动时,支承柱311也一起上下移动,从而可以变更高度使得第一主体312整体上恒定。
68.旋转部330位于第一主体312之上,并且在旋转部330之上连接有第二主体335。
69.旋转部330可以起到使以第一主体312为基准位于上部的第二主体335旋转的作用,并且包括执行旋转操作的旋转缸体。旋转缸体可以通过液压旋转或者通过电机旋转。
70.第二主体335可以如第一主体312那样具有水平延伸的杆类型结构。在第二主体335的上部面形成一对宽度调节部340和引导部350。在一对宽度调节部340和引导部350固定有一对臂部370。
71.一对宽度调节部340包括进行线性运动的缸体,并且沿着第二主体335的长度方向(以下称为第一方向)排列一对宽度调节部340。宽度调节部340通过缸体的运动,在第二主体335的长度方向上变长或变短。根据实施例,宽度调节部340也可以代替缸体而具有通过
电机进行线性运动的结构,从而通过电机的工作来实现宽度调节。
72.在引导部350中,沿着第二主体335的长度方向排列有如轨道这样的引导件。
73.固定在一对宽度调节部340和引导部350的一对臂部370包括固定于宽度调节部340的第一连接部371、随着引导部350而移动的第二连接部372以及设置有能够吸附基板30的吸附部360的吸附部支承杆373。
74.第一连接部371具有与宽度调节部340的缸体的末端部分连接而在缸体进行线性运动时与之一起运动的结构。根据实施例,如图12所示,宽度调节部340的缸体末端部分具有圆形结构,第一连接部371可以形成为与该圆形结构隔着间隙(0.2mm程度的间隙)而将其包围的结构,从而形成为运动不受限制。
75.第二连接部372具有随着引导部350而能够进行线性移动的结构,并且具有包括与引导部350的轨道结构对应的槽而沿着轨道移动的结构。第二连接部372与第一连接部371连接,从而在第一连接部371随着宽度调节部340的缸体的线性运动而移动时一起运动。
76.吸附部支承杆373在与第二主体335的长度方向垂直的方向(以下称为第二方向)上长长地延伸,并且隔着一定间隔设有多个吸附部360。吸附部支承杆373与第一连接部371及第二连接部372连接,从而在第一连接部371随着宽度调节部340的缸体的线性运动而移动时一起移动。如上所述,若一对宽度调节部340进行线性运动,则一对臂部370也一起运动,从而可以与基板30在第二方向上的宽度相符地移动位于臂部370的吸附部360的位置。
77.吸附部360可以具有排列在朝下方向上的吸附口,从而吸附位于朝下方向上的基板30。在图6中,在一侧形成有三个吸附部360,可以根据吸附的基板30的大小而包括各种数量。
78.伸缩管380也被称为伸缩管阀或者真空维持部,密封性能出色,从而即使基板移送部300的一部分位于真空设备之外,也可以维持真空设备的真空。伸缩管380可以具有双重密封结构。
79.伸缩管380位于驱动部310的一侧,并且支承柱311位于伸缩管380的内部,支承柱311也可以具有随着上下移动部320的操作而能够一起上下移动的结构。此时,支承柱311的操作可以构成为通过驱动部310而在上下进行线性移动。
80.以下,通过图7至图14,仔细观察各部分的结构。
81.参照图7,放大示出了上下移动部320的结构。
82.上下移动部320可以包括轨道,并且可以包括被固定于下部腔体100的底面的支承部322以及与第一主体312连接而沿着轨道使第一主体312上下移动的线性电机部321。通过线性电机部321的工作,第一主体312以及与第一主体312连接的其他部分(旋转部330、第二主体335、宽度调节部340、引导部350、臂部370、吸附部360等)也一起上下移动。根据实施例,上下移动部320的操作也可不通过电机来实现,而是通过液压来实现。
83.参照图8,放大示出了旋转部330的结构。
84.旋转部330可以包括与第一主体312连接的支承部332以及与第二主体335连接而使第二主体335旋转的旋转缸体331。在图8中,支承部332中的突出的部分可以是为了控制旋转缸体331的旋转操作而接收外部的输入的部分。旋转缸体331的操作可以通过电机或液压来实现。
85.参照图9,放大示出了宽度调节部340的结构和操作。
86.宽度调节部340包括进行线性运动的缸体341以及根据缸体341的操作而长度被调节的操作部342。操作部342的末端具有圆形结构,并且宽度被扩展。参照图9的(a)和图9的(b),缸体341被固定于第二主体335,在缸体341工作时,缸体341不运动,操作部342的从缸体341朝向第一方向突出的长度被调节。通过调节操作部342的突出的长度,调节臂部370和吸附部360的位置。缸体341的操作可以通过电机或液压来实现。
87.参照图10,放大示出了引导部350的结构和操作。
88.引导部350包括沿着第二主体335的长度方向(第一方向)排列的轨道351以及沿着轨道351移动的多个移动部352。轨道351被固定于第二主体335,多个移动部352被划分为两组而分别与一对的第二连接部372连接,从而使得第二连接部372沿着轨道351进行线性移动。第二连接部372形成为与第一连接部371连接而在第一连接部371进行线性运动时一起进行线性运动。
89.参照图11,放大示出了吸附部360的结构。
90.吸附部360包括排列在朝下方向上的吸附口362以及从吸附口362吸入空气并固定吸附口362的主体361。在图11中,可以从主体361抽出空气来在吸附口362形成真空,从而通过吸附来固定位于下部的基板30的上部面。
91.参照图12,放大示出了第一连接部371和连接有宽度调节部340中的操作部342的末端的结构,并且在图12中示出了截面。
92.宽度调节部340中的操作部342的末端具有圆形结构,第一连接部371形成有与圆形结构对应的槽。在第一连接部371的槽与宽度调节部340中的操作部342的末端之间形成有间隙g,在一实施例中,间隙g可以是0.2mm。根据实施例,可以具有0.1mm以上且0.3mm以下的间隙。根据如上所述的结构,操作部342的末端可以在第一连接部371的槽内无摩擦地进行旋转,从而宽度调节部340的线性运动可以无损失地被传递至第一连接部371。
93.参照图13,放大示出了臂部370中的吸附部支承杆373和第二连接部372的一部分。
94.第二连接部372具有槽374,从而具有与吸附部支承杆373固定的结构。第二连接部372的槽374可以在第一方向上形成得长。
95.吸附部支承杆373具有槽375,从而具有可以固定一对吸附部360的结构。槽375在吸附部支承杆373的长度方向(第二方向)上形成得长,从而一对吸附部360还可以被固定在第二方向上的其他位置处。
96.对于第二连接部372而言,在第二方向上,第一连接部371位于吸附部支承杆373的相反侧。
97.参照图14,以伸缩管380和下部腔体100的结构为中心示出了基板移送部300的整体结构。
98.伸缩管380与下部腔体100的下部面密接,从而可以使真空设备维持真空。此外,下部腔体100在与位于伸缩管380的内侧的支承柱311对应的部分设置有槽,从而可以使基板移送部300中的部分结构位于真空内。基板移送部300中的伸缩管380和驱动部310位于真空的外部,位于真空内的部分可以是上下移动部320、旋转部330、宽度调节部340、吸附部360、臂部370、支承柱311、第一主体312和第二主体335。
99.在图15中示出了图6的基板移送部300的操作。
100.图15的(a)和图15的(b)表示一对臂部370与基板30的大小相符地进行线性移动的
情况,图15的(c)和图15的(d)是表示使臂部370上下移动使得吸附部360吸附在基板30的上部面的过程的图,图15的(e)是表示旋转部330旋转而将所吸附的基板30排出至真空设备之外的过程的图。
101.在图15的(a)和图15的(b)中,一对臂部370的线性移动基于宽度调节部340的线性操作。在图15的(c)和图15的(d)中示出的臂部370的上下移动在通过上下移动部320的上下操作而使上下移动部320和支承柱311上下移动的同时执行。
102.在图15中,图15的(b)和图15的(c)可以是相同时刻的立体图和侧面图,基板移送部300的操作从图15的(a)的步骤经过图15的(b)和图15的(c)的步骤之后通过图15的(d)的步骤吸附基板30,并且如图15的(e)那样从表示为30-1的原本的位置进行旋转来将基板30排出至真空设备之外。
103.以下,通过图16至图19来观察又一实施例涉及的基板移送部的结构和操作,并首先通过图16和图17观察又一实施例涉及的基板移送部300-1的结构和操作。
104.图16是又一实施例涉及的基板移送部的立体图,图17是表示图16的实施例涉及的基板移送部的操作的图。
105.通过图16,说明又一实施例涉及的基板移送部300-1的示意性结构。
106.又一实施例涉及的基板移送部300-1包括主体310-1、旋转部330-1、上下移动部320-1、吸附部360-1和臂部370-1,在图16中仅示出了与图6具有差异的部分,并未示出伸缩管380和支承柱311。即,虽然在图16中未示出,但是基板移送部300-1可以如图6所示那样通过伸缩管380和位于伸缩管380的内侧的支承柱311而与主体310-1连接,并且根据实施例还可以包括驱动部310。图16的基板移送部300-1也具有位于真空设备内的部分,并且图16所示的部分可以都位于真空设备(即下部腔体100)内。
107.仅观察图16的基板移送部300-1中与图6具有差异的部分如下。
108.主体310-1是连接旋转部330-1和位于其下部的支承柱311的部分,位于真空设备内。
109.旋转部330-1可以起到使以主体310-1为基准位于上部的上下移动部320-1、臂部370-1和吸附部360-1旋转的作用,并且包括执行旋转操作的旋转缸体。旋转缸体可以通过液压旋转或者通过电机旋转。
110.位于旋转部330-1的一侧的上下移动部320-1可以使与其连接的臂部370-1和吸附部360-1上下移动。其结果,吸附部360-1从基板30的上方朝下移动,从而吸附基板30的上部面。上下移动部320-1可以包括使其在上下方向上移动的电机,并且包括通过电机的工作而沿着如轨道这样的引导件上下移动的部分。
111.臂部370-1可以具有向上下移动部320-1延伸并且被弯曲的线性杆结构。
112.在臂部370-1的末端可以包括能够吸附基板30的上部面的吸附部360-1,一个吸附部360-1可以包括多个如图11那样的吸附部。
113.在图17中示出了图16的基板移送部300-1的操作。
114.图17的(a)和图17的(b)是示出一个臂部370-1原本位于基板30的末端但通过旋转部330-1的旋转而旋转成吸附部360-1位于基板30的中央的情况的图,图17的(c)是示出臂部370-1通过上下移动部320-1上下移动使得吸附部360-1吸附到基板30的上部面的中央的过程的图,图17的(d)是示出旋转部330-1在与图17的(a)及图17的(b)相反的方向上旋转而
将所吸附的基板30排出至真空设备之外的过程的图。
115.图16的实施例涉及的基板移送部300-1仅具有一个臂部370-1,因此具有对基板30的边侧不进行吸附而是对基板30的中央部进行吸附的结构。
116.在图17中,基板移送部300-1的操作如下,即,在图17的(a)的步骤中如图17的(b)的步骤那样朝向基板30的中央部旋转之后,通过图17的(c)的步骤将基板30吸附,并且如图17的(d)的步骤那样从表示为30-1的原本的位置旋转而将基板30排出至真空设备之外。
117.以下,通过图18和图19观察又一实施例涉及的基板移送部300-2的结构和操作。
118.图18是又一实施例涉及的基板移送部的立体图,图19是表示图18的实施例涉及的基板移送部的操作的图。
119.通过图18,又一实施例涉及的基板移送部300-2的示意性结构表示不同于以上的基板移送部300、300-1,仅利用线性运动来将基板30排出至真空设备的外部的实施例。观察图18的实施例涉及的基板移送部300-2如下。
120.又一实施例涉及的基板移送部300-2由一对线性移送部构成,各线性移送部包括主体310-2、宽度调节部340-1、340-2、上下移动部320-2、吸附部360-2和臂部370-2。此外,在图18中,如图16所示那样仅示出与图6具有差异的部分,并未示出伸缩管380和支承柱311。即,虽然在图18中未示出,但是一对线性移送部分别如图6所示那样通过伸缩管380及位于伸缩管380的内侧的支承柱311而与主体310-1连接,并且根据实施例还可以包括驱动部310。图18的基板移送部300-2也包括位于真空设备内的部分,并且图18中所示的部分可以都位于真空设备(即下部腔体100)内。
121.仅观察图18的基板移送部300-2中与图6具有差异的部分如下。以下,仅叙述一对线性移送部中的一个的结构。
122.在一个主体310-2形成有一对上下移动部320-2以及两个宽度调节部340-1、340-2。支承柱311位于主体310-2的下部而位于真空设备内。
123.一对上下移动部320-2可以包括能够使主体310-2在上下方向上移动的电机,并且可以包括通过电机的工作沿着如轨道这样的引导件而上下移动的部分。一对上下移动部320-2可以被固定于下部腔体100的内部的底面,从而变更从下部腔体100的内部的底面至主体310-2的高度。在上下移动部320-2上下移动时,支承柱311也一起上下移动,从而变更高度使得主体310-2整体上恒定。
124.两个宽度调节部340-1、340-2由第一宽度调节部340-1和第二宽度调节部340-2构成。
125.两个宽度调节部340-1、340-2可以分别包括进行线性运动的缸体,并且沿着主体310-2的长度方向排列两个宽度调节部340-1、340-2。通过两个宽度调节部340-1、340-2的缸体的运动,在第二主体335的长度方向上变长。第一宽度调节部340-1的末端与臂部370-2连接,在两个宽度调节部340-1、340-2都变长的情况下,臂部370-2从真空设备的内侧朝向外侧移动。另一方面,根据实施例,两个宽度调节部340-1、340-2中的至少一个可以包括轨道。
126.臂部370-2可以具有从第一宽度调节部340-1的末端在与第一宽度调节部340-1的延伸方向垂直的方向上形成得长的线性杆结构。
127.臂部370-2的末端具有被弯曲的结构,并且包括可以吸附基板30的上部面的吸附
部360-2,一个吸附部360-2可以包括多个如图11那样的吸附部。
128.在图19中示出了图18的基板移送部300-2的线性操作。
129.在图19中示出了两个宽度调节部340-1、340-2都变长的情况,此时,基板30从表示为30-1的原本的位置被排出至真空设备之外。在两个宽度调节部340-1、340-2之中一个具有短的结构的情况下,可以处于在真空设备内不进行任何操作的待机状态,在两个宽度调节部340-1、340-2都具有短的结构的情况下,可以是进行吸附基板30的操作的时候。根据实施例,也可以是两个宽度调节部340-1、340-2都具有短的结构时处于待机状态,并且只有一个具有短的结构时进行吸附操作。
130.以下,对本实用新型的实施例进行了详细说明,但是本实用新型权利范围并不限于此,本领域技术人员利用权利要求书中定义的本实用新型的基本概念进行的各种变形以及改良也属于本实用新型的权利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1