一种视觉识别的抛粮翻粮巡检机器人
1.本实用新型涉及粮食存储领域,具体是一种视觉识别的抛粮翻粮巡检机器人。
背景技术:
2.对于在粮食粮食收储企业而言,粮食的入仓存储与出库运输是企业的核心工作环节,而在粮食存放在粮仓里等待售卖的时候,由于粮食间的相互挤压和部分区域湿度过大,会使部分区域粮食流动性变差甚至凝结成块,而在进行出库作业时,工人将吸粮机插入粮堆后,粮食在重力的作用下流入吸粮机,在大型粮仓里,人员手动敲打粮食结块部分具有较大安全隐患,容易发生粮堆坍塌掩埋工作人员的生产安全事故,在市场上也有相关的翻粮机,在将粮食储藏时期定期搅动粮仓里的粮食来打碎粮食内部结块。
3.但是,但在较大型粮仓中,粮食在相互挤压的情况下还是会有发生结块现象,仍然需要人工手动解决,容易发生安全隐患。
技术实现要素:
4.针对现有的问题,本实用新型提供一种视觉识别的抛粮翻粮巡检机器人,该装置配合使用可以有效的解决背景技术中提出的问题。
5.为解决上述问题,本实用新型采用如下的技术方案:
6.一种视觉识别的抛粮翻粮巡检机器人,包括机器人,所述机器人的一端设置有翻粮滚轮,所述翻粮滚轮与所述机器人之间连接有传动轴,所述翻粮滚轮的外侧安装有翻粮叶片,所述传动轴的端部安装有卡接头,所述卡接头的外侧位于所述机器人的内部安装有丝杆,所述丝杆位于靠近所述传动轴的一端开设有卡槽,所述丝杆的外侧套接有螺帽,所述机器人的上表面安装有驱动仓,所述驱动仓的上表面安装有气泵。
7.作为本实用新型再进一步的方案:所述气泵的一侧贯穿所述驱动仓及所述机器人的内部安装有吸粮管,所述吸粮管的下端安装有吸粮头。
8.作为本实用新型再进一步的方案:所述气泵位于远离所述翻粮滚轮的一侧安装有导粮槽,所述导粮槽的下端位于所述机器人的内部开设有传送口。
9.作为本实用新型再进一步的方案:所述机器人的下方设置有导向轮支架,所述导向轮支架的下端安装有导向轮,所述导向轮的另一端安装有调向齿轮,所述调向齿轮的一侧安装有棘爪,所述棘爪与所述机器人之间连接有扭簧。
10.作为本实用新型再进一步的方案:所述传动轴通过所述卡接头与所述螺帽端部的卡槽卡接,所述螺帽与所述丝杆啮合转动连接,所述传动轴的一端外侧位于所述机器人的外侧安装有翻粮电机。
11.作为本实用新型再进一步的方案:所述吸粮头与所述吸粮管贯通连接。
12.作为本实用新型再进一步的方案:所述导粮槽与所述气泵贯通连接,所述传送口外接传输带。
13.作为本实用新型再进一步的方案:所述扭簧与所述调向齿轮啮合卡接,所述扭簧
通过所述棘爪与所述机器人弹性连接。
14.与现有技术相比,本实用新型的有益效果是:
15.1、通过翻粮电机带动传动轴使得翻粮滚轮外侧的翻粮叶片对结块的粮食进行打散操作方便后续的传输粮食,再利用气泵控制吸粮头将粮食通过吸粮管导向到导粮槽的内部,利用将传送口外接传送带,粮食通过导粮槽传送到传送口内部连接的传送带中,实现粮食的输送。
16.2、丝杆位于靠近传动轴的一端开设有卡槽,丝杆的外侧套接的螺帽在进行转动时会控制传动轴和丝杆之间的安装和拆卸,在机器人不同的使用情况进行使用,方便控制不不同情况下粮食的处理。
17.3、利用控制对导向轮支架施加作用力,使得调向齿轮和棘爪进行啮合转动,实现控制对机器人整体的支撑高度,从而可以控制吸粮机构对粮食的吸收输送。
附图说明
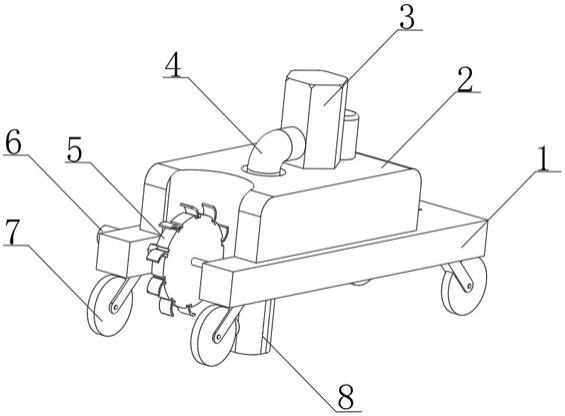
18.图1为一种视觉识别的抛粮翻粮巡检机器人的结构示意图;
19.图2为一种视觉识别的抛粮翻粮巡检机器人中导向轮的结构示意图;
20.图3为一种视觉识别的抛粮翻粮巡检机器人中机器人背视图;
21.图4为一种视觉识别的抛粮翻粮巡检机器人中翻粮滚轮的结构示意图。
22.图中:1、机器人;2、驱动仓;3、气泵;4、吸粮管;5、翻粮滚轮;6、翻粮电机;7、导向轮;8、吸粮头;9、传送口;10、导粮槽;501、翻粮叶片;502、传动轴;503、卡接头;504、丝杆;505、螺帽;701、导向轮支架;702、调向齿轮;703、棘爪;704、扭簧。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.如图1-3所示,本实施方式提供了一种视觉识别的抛粮翻粮巡检机器人,包括机器人1,在机器人1上配设有翻粮机构和吸粮机构,通过配合使用可以实现对结块的粮食打散和传送作用,翻粮机构包括翻粮滚轮5、翻粮叶片501,翻粮滚轮5与机器人1之间,翻粮滚轮5与机器人1之间连接有传动轴502,传动轴502的端部安装有卡接头503,卡接头503的外侧位于机器人1的内部安装有丝杆504,丝杆504位于靠近传动轴502的一端开设有卡槽,丝杆504的外侧套接有螺帽505,翻粮滚轮5整体可以在使用中来实现自由的安装和拆卸,在机器人不同的使用情况进行使用,传动轴502的一端外侧位于机器人1的外侧安装有翻粮电机6,通过翻粮电机6带动传动轴502使得翻粮滚轮5外侧的翻粮叶片501对结块的粮食进行打散操作方便后续的传输粮食;吸粮机构包括气泵3和吸粮头8,在机器人1的上表面安装有驱动仓2,气泵3安装在在驱动仓2的上表面,气泵3的一侧贯穿驱动仓2及机器人1的内部安与吸粮头8之间连接有吸粮管4,在气泵3位于远离翻粮滚轮5的一侧安装有导粮槽10,导粮槽10的下端位于机器人1的内部开设有传送口9,利用气泵3控制吸粮头8将粮食通过吸粮管4导向到导粮槽10的内部,利用将传送口9外接传送带,粮食通过导粮槽10传送到传送口9内部连
接的传送带中,实现粮食的输送。
25.如图1-2所示,机器人1的下方设置有导向轮支架701,导向轮支架701的下端安装有导向轮7,导向轮7的另一端安装有调向齿轮702,调向齿轮702的一侧安装有棘爪703,棘爪703与机器人1之间连接有扭簧704,利用控制对导向轮支架701施加作用力,使得调向齿轮702和棘爪703进行啮合转动,实现控制对机器人1整体的支撑高度,从而可以控制吸粮机构对粮食的吸收输送。
26.本实用新型的工作原理是:通过根据储粮的情况控制机器人主体的安装和使用,利用对导向轮支架701施加作用力,使得调向齿轮702和棘爪703进行啮合转动,实现控制对机器人1整体的支撑高度,利用控制翻粮电机6带动传动轴502使得翻粮滚轮5外侧的翻粮叶片501对结块的粮食进行打散操作方便后续的传输粮食,打散后的粮食可以在气泵3的吸力作用下,使得粮食通过吸粮头8一侧的通孔被吸附到吸粮管4的内部,再通过吸粮头8将粮食通过吸粮管4导向到导粮槽10的内部,利用将传送口9外接传送带,粮食通过导粮槽10传送到传送口9内部连接的传送带中,实现粮食的输送。
27.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序,而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
28.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1