一种智能医废收集器输出机构的制作方法
1.本实用新型涉及医疗废物收集技术领域,特别涉及一种智能医废收集器输出机构。
背景技术:
2.在医院、诊所等医疗场所,会产生大量的医疗废物,而医疗废物上通常会携带很多的病菌。目前,通常采用普通的垃圾袋套设在垃圾桶上容纳医疗废物,当医疗废物装满后,需要工作人员打开垃圾桶并将垃圾袋取出处理,费时费力。
技术实现要素:
3.本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种智能医废收集器输出机构,能够实现垃圾袋的自动输出,降低工作人员的劳动强度。
4.根据本实用新型的第一方面,提供一种智能医废收集器输出机构,包括托盘,活动设置在智能医废收集器中,桶体设置在所述托盘上;输出驱动机构,设置在智能医废收集器壳体上,所述输出驱动机构用于驱动所述托盘运动;以及制动机构,设置在所述托盘上并与所述输出驱动机构电连接。
5.有益效果:一种智能医废收集器输出机构包括:托盘、输出驱动机构以及制动机构。托盘活动设置在智能医废收集器中,桶体设置在所述托盘上。输出驱动机构以及制动机构设置在智能医废收集器壳体上。输出驱动机构能够实现托盘的自动输出和自动收回,完成桶体的自动输出和回收,优化了医用废物的处理流程,降低工作人员的劳动强度。
6.根据本实用新型所述的一种智能医废收集器输出机构,所述托盘上设有可容置桶体的限位槽。
7.根据本实用新型所述的一种智能医废收集器输出机构,所述输出驱动机构包括:支撑组件,设置在智能医废收集器壳体上且位于所述托盘下方,所述支撑组件用于支撑所述托盘,使所述托盘运动从滑动摩擦转变为滚动摩擦;以及驱动组件,设置在智能医废收集器壳体上,所述驱动组件用于驱动所述托盘运动,进而带动所述桶体输出。
8.根据本实用新型所述的一种智能医废收集器输出机构,所述驱动组件包括:动力源,设置在智能医废收集器壳体上;驱动杆,可转动地设置在智能医废收集器壳体上;驱动齿轮,设置在所述驱动杆上且与所述动力源的输出端啮合,所述动力源可驱动所述驱动齿轮转动进而带动所述驱动杆转动;从动齿条,设置在所述托盘上,所述从动齿条为至少两条;以及分驱动齿轮,设置在所述驱动杆上且与所述从动齿条啮合,所述驱动杆转动可带动所述分驱动齿轮转动进而使得所述从动齿条与所述分驱动齿轮发生相对位移。
9.根据本实用新型所述的一种智能医废收集器输出机构,所述支撑组件包括:滚动板,设置在所述托盘上;以及底部支撑滚子,可转动地设置在智能医废收集器壳体上且位于所述滚动板下方,所述滚动板可在所述底部支撑滚子上移动。
10.根据本实用新型所述的一种智能医废收集器输出机构,所述支撑组件还包括滑出
支撑轮,所述滑出支撑轮设置在所述托盘的一端,所述滑出支撑轮可在地面滚动。
11.根据本实用新型所述的一种智能医废收集器输出机构,7、所述制动机构包括:制动检测块,设置在所述托盘一侧;滑出制动开关,设置在智能医废收集器壳体中并与所述输出驱动机构电连接,当所述托盘滑出至指定位置时,所述制动检测块触发所述滑出制动开关;以及复位制动开关,设置在智能医废收集器壳体中并与所述输出驱动机构电连接,当所述托盘完全收回至智能医废收集器壳体中时,所述制动检测块触发所述复位制动开关。
12.根据本实用新型所述的一种智能医废收集器输出机构,8、所述制动机构还包括:复位卡槽,开设在所述托盘上;以及复位卡爪,设置在智能医废收集器壳体中,所述复位卡爪可容置于所述复位卡槽中,所述复位卡爪可在所述托盘不需滑出时固定所述托盘。
13.根据本实用新型所述的一种智能医废收集器输出机构,所述复位卡爪为弹性卡爪,当所述托盘受到所述输出驱动机构的驱动时,所述复位卡爪与所述复位卡槽分离。
附图说明
14.下面结合附图和实施例对本实用新型进一步地说明;
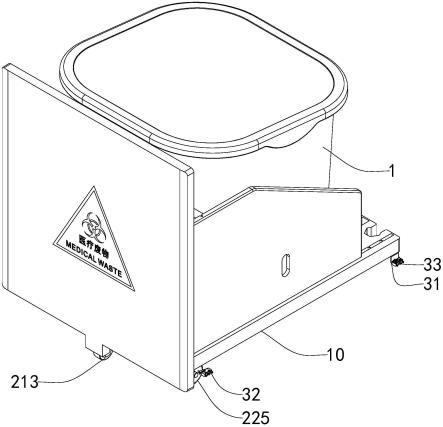
15.图1为本实用新型较佳实施例的结构示意图一;
16.图2为本实用新型较佳实施例的结构示意图二(省略桶体);
17.图3为本实用新型较佳实施例输出驱动机构的结构示意图一(省略托盘,保留智能医废收集器壳体);
18.图4为本实用新型较佳实施例输出驱动机构的结构示意图二(省略托盘,保留智能医废收集器壳体);
19.图5为本实用新型较佳实施例驱动输出机构与托盘的装配示意图(省略智能医废收集器壳体);
20.图6为本实用新型较佳实施例托盘的结构示意图;
21.图7为本实用新型较佳实施例智能医废收集器壳体示意图。
具体实施方式
22.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
23.在本实用新型的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
24.在本实用新型的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
25.本实用新型的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理
解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本实用新型中的具体含义。
26.参照图1至图7,一种智能医废收集器输出机构,包括托盘10、输出驱动机构20以及制动机构30。托盘10活动设置在智能医废收集器中。桶体1设置在托盘10上。输出驱动机构20设置在智能医废收集器壳体上。输出驱动机构20用于驱动托盘10运动。制动机构30设置在托盘10上并与输出驱动机构20电连接。
27.参照图2,托盘10上设有可容置桶体1的限位槽11。
28.可以理解的是,当桶体1在托盘10的带动下运动时,限位槽11能够增加桶体1的稳定性。
29.参照图1至图6,输出驱动机构20包括支撑组件21以及驱动组件22。支撑组件21设置在智能医废收集器壳体上且位于托盘10下方。支撑组件21用于支撑托盘10。使托盘10运动从滑动摩擦转变为滚动摩擦。驱动组件22设置在智能医废收集器壳体上。驱动组件22用于驱动托盘10运动,进而带动桶体1输出。
30.参照图1至图6,驱动组件22包括:动力源221、驱动杆222、驱动齿轮223、从动齿条224以及分驱动齿轮225。动力源221设置在智能医废收集器壳体上。驱动杆222可转动地设置在智能医废收集器壳体上。驱动齿轮223设置在驱动杆222上且与动力源221的输出端啮合。动力源221可带动驱动齿轮223转动进而带动驱动杆222转动。从动齿条224设置在托盘10上。从动齿条224为至少两条。分驱动齿轮225设置在驱动杆222上且与从动齿条224啮合。驱动杆222转动可带动分驱动齿轮225转动进而使得从动齿条224与分驱动齿轮225发生相对位移。
31.可以理解的是,在本实用新型的一些实施例中,当需要输出桶体1时,动力源221的输出端转动,带动驱动齿轮223转动,进而带动驱动杆222转动。设置在驱动杆222两端的分驱动齿轮225随着驱动杆222转动,而分驱动齿轮225与从动齿条224啮合,分驱动齿轮225驱动托盘10运动。
32.参照图1至图6,支撑组件21包括滚动板211以及底部支撑滚子212。滚动板211设置在托盘10上。底部支撑滚子212可转动地设置在智能医废收集器壳体上且位于滚动板211下方。滚动板211可在底部支撑滚子212上移动。
33.可以理解的是,在本实用新型的一些实施例中,在托盘10运动时,未滑出智能医废收集器的部分通过底部支撑滚子212进行支撑。底部支撑滚子212能够将托盘10运动时与智能医废收集器壳体的滑动摩擦转变为滚动摩擦,降低摩擦力,进而能够降低动力源221的功率,降低生产成本。
34.参照图1至图6,支撑组件21还包括滑出支撑轮213。滑出支撑轮213设置在托盘10的一端。滑出支撑轮213可在地面滚动。
35.可以理解的是,在本实用新型的一些实施例中,在托盘10运动时,滑出智能医废收集器的部分通过滑出支撑轮213进行支撑,避免托盘10伸出滑出智能医废收集器的部分变为悬臂梁,导致托盘10变形。
36.参照图1至图6,制动机构30包括:制动检测块31、滑出制动开关32以及复位制动开关33。制动检测块31设置在托盘10一侧。滑出制动开关32设置在智能医废收集器壳体中并与输出驱动机构20电连接。当托盘10滑出至指定位置时,制动检测块31触发滑出制动开关
32。复位制动开关33设置在智能医废收集器壳体中并与输出驱动机构20电连接。当托盘10完全收回至智能医废收集器壳体中时,制动检测块31触发复位制动开关33。
37.参照图1至图6,制动机构30还包括复位卡槽34以及复位卡爪35复位卡槽34开设在托盘10上。复位卡爪35设置在智能医废收集器壳体中。复位卡爪35可容置于复位卡槽34中。复位卡爪35可在托盘10不需滑出时固定托盘10。
38.参照图1至图6,复位卡爪35为弹性卡爪。当托盘10受到输出驱动机构20的驱动时,复位卡爪35与复位卡槽34分离。
39.可以理解的是,当托盘10复位后,托盘10会因为惯性与智能医废收集器的壳体碰撞,还可能因碰撞产生的反作用力而反弹滑出。在本实用新型的一些实施例中,通过复位卡槽34以及复位卡爪35配合,当托盘10收入智能医废收集器中,复位卡爪35能够插入复位卡槽34中,实现托盘10的锁紧,防止托盘10碰到智能医废收集器的壳体,还能够防止托盘10反弹。
40.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1