一种机器人自动上卸抓手装置的制作方法
1.本实用新型涉及玻璃钢罐缠绕技术领域,具体为一种机器人自动上卸抓手装置。
背景技术:
2.玻璃钢罐是当今社会取代碳钢罐体的一种新型材料容器,其成型工艺是纤维缠绕而成,在整个缠绕工艺过程中需要进行取罐、上罐、卸罐和挂罐等动作,由于罐体较大,需要两个人搬运,比较更耗费人力,而且玻璃钢管的生产过程中具有粘胶和高温处理,人工搬运时容易受伤,必须小心翼翼,这就降低了生产效率。
技术实现要素:
3.鉴于此,本实用新型的目的是提供一种机器人自动上卸抓手装置,用于克服上述问题或者至少部分地解决或缓解上述问题。
4.本实用新型提出一种机器人自动上卸抓手装置,用于抓取罐体,所述罐体的上部设置有缠绕工装,所述缠绕工装呈柱形,所述罐体的下部设置有尾部突起,所述机器人自动上卸抓手装置包括:框架,所述框架的一侧与机器人相连接,所述框架的另一侧的上部设置有固定抓手,下部设置有托底夹爪,所述固定抓手与所述缠绕工装相匹配,所述托底夹爪与所述尾部突起相匹配,所述托底夹爪与所述框架之间设置有纵向移动机构。
5.本实用新型还具有以下可选特征。
6.优选的,所述固定抓手包括:
7.固定座,所述固定座的前端的两侧对称设置有铰接头;
8.两个爪扣,每个所述爪扣的前端向内弯曲,中部铰接在所述铰接头上,内端分别设置有圆柱滑块;
9.第一电磁铁,所述电磁铁设置在所述固定座内,所述电磁铁的铁芯的外端设置有牵引块,所述牵引块上设置有横向滑孔,两个所述爪扣内端的所述圆柱滑块滑动装配在所述横向滑孔内。
10.优选的,所述纵向移动机构包括移动座,所述移动座直接或间接装配在所述框架上,所述移动座上竖向设置有第二电磁铁和滑轨,所述托底夹爪滑动装配在所述滑轨上,所述第二电磁铁的铁芯与所述托底夹爪相连接。
11.优选的,所述框架的外侧的下部还纵向设置有导轨,所述移动座与所述导轨滑动配合,所述移动座上设置有钳制器。
12.优选的,还包括调正架,所述调正架设置在所述框架的外侧,且位于所述固定抓手和所述托底夹爪之间,所述调正架的前端设置有弧形缺口,所述弧形缺口与所述罐体表面相匹配。
13.优选的,所述框架的外侧并列设置有多个所述固定抓手和所述托底夹爪。
14.优选的,所述缠绕工装的上端设置有吊装卡位,中部设置有一对定位环。
15.本实用新型的机器人自动上卸抓手装置是提升玻璃钢缠绕生产的一个辅助装置,
在机器人的支配下可完成整个缠绕过程的自动取罐,上罐,卸罐,挂罐动作,无需人工参与,可是实线整个缠绕过程无人作业,能够完全取代人工操作,工装过程精准无误,不仅大大节约劳动力,而且提高了生产效率。
附图说明
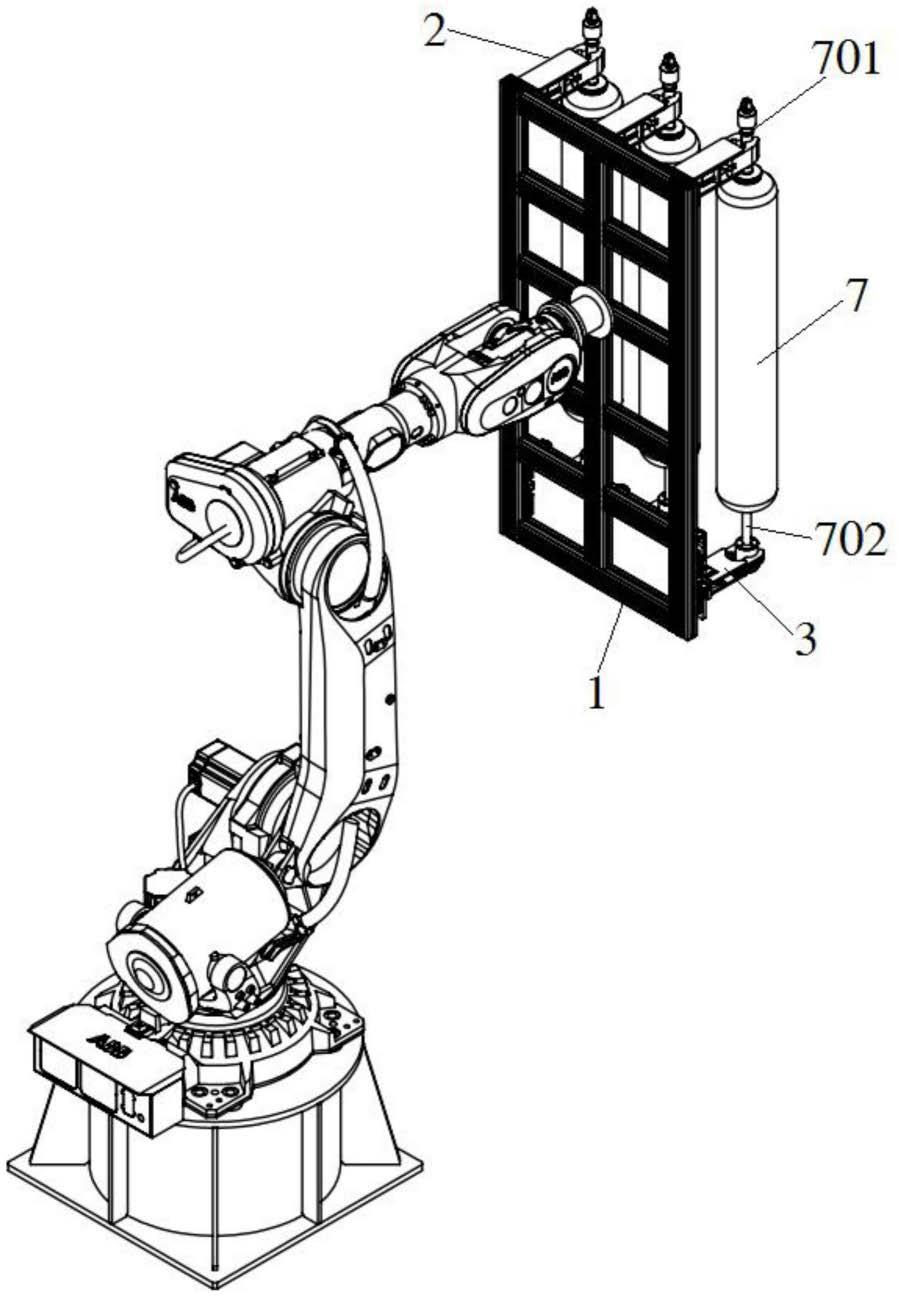
16.图1是本实用新型的机器人自动上卸抓手装置与机器人配合使用示意图;
17.图2是本实用新型的机器人自动上卸抓手装置的正向结构示意图;
18.图3是本实用新型的机器人自动上卸抓手装置的侧向结构示意图;
19.图4是图2的俯视图;
20.图5是本实用新型的机器人自动上卸抓手装置的固定抓手的结构图;
21.图6是缠绕工装的结构示意图。
22.在以上图中:1框架;2固定抓手;201固定座;202铰接头;203爪扣;204圆柱滑块;205第一电磁铁;206牵引块;207横向滑孔;3托底夹爪;4纵向移动机构;401移动座;402第二磁铁;403滑轨;404钳制器;5导轨;6调正架;7罐体;701缠绕工装;702尾部突起;703吊装卡位;704定位环。
23.以下将结合附图及实施例对本实用新型做进一步详细说明。
具体实施方式
24.参考图1、图2、图3、图4和图6,本实用新型的实施例提出一种机器人自动上卸抓手装置,用于抓取罐体7,罐体7的上部设置有缠绕工装701,缠绕工装701呈柱形,缠绕工装701通过螺纹部与罐体7临时连接,罐体7的下部设置有尾部突起702,机器人自动上卸抓手装置包括:框架1,框架1的一侧与机器人相连接,框架1的另一侧的上部设置有固定抓手2,下部设置有托底夹爪3,固定抓手2与缠绕工装701相匹配,托底夹爪3与尾部突起702相匹配,托底夹爪3与框架1之间设置有纵向移动机构4。在使用时,托底夹爪3与固定抓手2之间的距离大于罐体7的长度,固定抓手2在机器人的带动下运动至罐体7前,然后固定抓手2夹住罐体7上端的缠绕工装701,托底夹爪3在纵向移动机构4的带动下向上运动到罐体7下端将尾部突起702夹住,然后机器人即可将罐体7移动到挂罐位置将罐体7挂住后,托底夹爪3在纵向移动机构4的带动下向下运动与尾部突起702分离,然后固定抓手2打开后原理缠绕工装701,完成对当前罐体7的移动。
25.参考图5,根据本实用新型的一种实施例,固定抓手2包括:固定座201、两个爪扣203和第一磁铁205;固定座201的前端的两侧对称设置有铰接头202;每个爪扣203的前端向内弯曲,可以夹住缠绕工装701,爪扣203中部铰接在铰接头202上,内端分别设置有圆柱滑块204;第一电磁铁205设置在固定座201内,第一电磁铁205的铁芯的外端连接有牵引块206,牵引块206上设置有横向滑孔207,两个爪扣203内端的圆柱滑块204滑动装配在横向滑孔207内,第一磁铁205的铁芯向外伸出时,通过牵引块206推动两个圆柱滑块204在横向滑孔207内向中间运动,则两个爪扣203打开,第一磁铁205的铁芯向内收缩时,两个圆柱滑块204沿着横向滑孔207向两端运动,则两个爪扣203闭合。
26.参考图2和图3,根据本实用新型的一种实施例,纵向移动机构4包括移动座401,移动座401直接或间接装配在框架1上,移动座401上竖向设置有第二电磁铁402和滑轨403,托
底夹爪3滑动装配在滑轨403上,第二电磁铁402的铁芯与托底夹爪3相连接。第二电磁铁402在常态下其铁芯向下伸出,当需要夹住罐体7的尾部突起702时,第二电磁铁402的铁芯缩回,拉动移动座401沿着滑轨403向上移动,使托底夹爪3夹住团体7的尾部突起702。
27.参考图3,根据本实用新型的一种实施例,框架1的外侧的下部还纵向设置有导轨5,移动座401与导轨5滑动配合,移动座401上设置有钳制器404。在夹取不同长度的罐体7时,则需要对固定抓手2和托底夹爪3之间的距离进行调整,将移动座401在导轨5上的位置调整好后,拧紧钳制器404即可将移动座401夹紧固定在导轨5上。
28.参考图3,根据本实用新型的一种实施例,还包括调正架6,调正架6设置在框架1的外侧,且位于固定抓手2和托底夹爪3之间,调正架6的前端设置有弧形缺口,弧形缺口与罐体7表面相匹配。调正架6的一端垂直固定在框架1的外侧,其外端的弧形缺口与罐体7的外周弧面相同,当固定抓手2抓取缠绕工装701时,调正架6可通过弧形缺口扶正罐体7,具有辅助定位作用。
29.参考图1、图2和图4,根据本实用新型的一种实施例,框架1的外侧并列设置有多个固定抓手2和托底夹爪3。如果多个罐体7同时进行生产加工,对应的,可在框架1上并列设置多对固定抓手2和托底夹爪3,可同时对同时加工的多个罐体7同时进行搬运。
30.参考图1、图5和图6,根据本实用新型的一种实施例,缠绕工装701的上端设置有吊装卡位703,中部设置有一对定位环704。两个定位环704之间的距离即固定抓手2的宽度,固定抓手2抓取缠绕工装701时是夹在在两个定位环704之间,位于缠绕工装701顶部的吊装卡位703的直径远大于缠绕工装701的其他部位直径,用于挂罐。
31.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。本实施例没有详细叙述的部件和结构属本行业的公知部件和常用结构或常用手段,这里不一一叙述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1