一种双头桁架小车的制作方法
1.本实用新型涉及一种套圈自动加工过程中的自动上下料机构的改进。
背景技术:
2.在轴承厂的成品车间,需要抓取并装载钢环套圈。
3.轴承套圈对精度要求比较高,要求外圈无划痕和其他横机,这对于套圈的搬运要求很高,需要确保在抓取和加载过程中没有重大碰撞或划痕。
4.钢环主要依靠人力及吊车及料道运输在各种工艺设备之间移动,在这个过程中,捆绑轴承的绑带是柔性连接的,工人操作的吊车只能直上直下运输这些,所以钢圈很可能会发生碰撞、划伤而损坏钢圈,并且工人劳动强度大,移动效率低,桁架小车在桁架上高速运行,载着刚换套圈在储料装置和加工装置中穿梭,由于桁架小车体积较大,如果追求运载能力,速度过大会由于小车的惯性造成定位不准,影响到夹持精度。但是桁架小车运行速度过慢也会产生运输能力跟不上的现象。
技术实现要素:
5.为了克服现有桁架小车运载力弱的不足,本实用新型提供一种双头桁架小车。
6.本实用新型解决此技术问题的技术方案是:一种双头桁架小车,所述桁架小车包括一个带动力的横梁活动导轨架和活设于横梁活动导轨架上的小车平台,所述横梁活动导轨架上设有一个y轴向导轨,所述小车平台滑设在y轴向导轨上,所述小车平台上设有两条可以在z轴方向上下活动的夹持机械臂,所述夹持机械臂的头端设有套圈机械手;所述夹持机械臂包括一个杆体,所述杆体与小车平台接触处设有正向导轨条,所述小车平台上设有第一擒拿装置抱住正向导轨条;所述横梁活动导轨架的动力机构为一个x轴驱动电机,所述小车平台设有驱动小车平台的y轴驱动电机、驱动夹持机械臂的z轴驱动电机。
7.为进一步强化夹持机械臂上下运行的稳定程度,所述杆体侧面还设有侧向导轨条,所述小车平台上设有一个第二擒拿装置抱住侧向导轨条。
8.一种第二擒拿装置的设置方式,所述小车平台靠夹持机械臂一侧设有一个伸出架,所述第二擒拿装置设于伸出架上。
9.为了遮盖住伸出架,还包括一个桥接在夹持机械臂上的盖壳,所述盖壳中留出夹持机械臂的通道,所述盖壳盖在夹持机械臂上,且伸出架位于且盖壳中。
10.对机械臂上下结构进行调节,所述杆体上设有与z轴齿条,所述小车平台上设有z轴驱动电机,所述z轴驱动电机的头端设有与z轴齿条啮合的z轴齿轮,所述z轴齿轮位于盖壳内。
11.一种x轴的驱动方式优选,所述x轴驱动电机头端设有x轴齿轮与大梁上的x轴齿条啮合传动。
12.一种y轴的驱动方式优选,所述横梁活动导轨架设有与y轴导轨平行的y轴齿条,所述小车平台中部头向下设有一个y轴驱动电机,所述y轴驱动电机的头端设有与y轴齿条啮
合的y轴齿轮。
13.本实用新型使用方法是将双头桁架小车安装在桁架的两条x轴大梁导轨上,然后在横梁活动导轨架的x轴驱动电机驱动下,x轴齿轮与大梁上的x轴齿条啮合传动,完成在x轴方向上的运动;小车平台在横梁活动导轨架行使y向移动,可以方便的在y方向上完成小车平台的运动;在z轴的竖向运动上,两个夹持机械臂在小车平台的z轴驱动电机和杆体的齿条作用下,上下活动,完成z轴方向的运动。
14.本实用新型的有益效果在于:1、具有两条夹持机械臂,在一个机械臂完成上料夹持的过程中,也不影响下料过程中机械臂的使用,方便了整个桁架小车的运输。2、桁架小车z轴的夹持机械臂采用正面和侧面设置导轨和擒抱导轨的结构,来实现夹持机械臂的上下活动稳定运行,采用两组导轨设置下,导轨上下活动精度高,抗干涉能力强。
附图说明
15.图1是本实用新型桁架小车安装在桁架上的示意图。
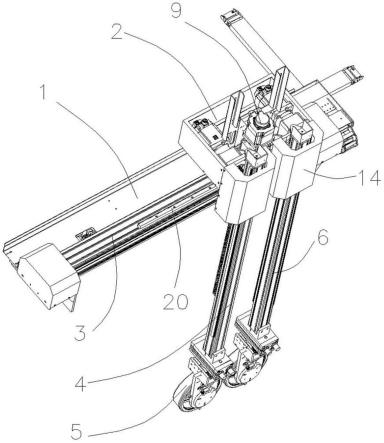
16.图2是本实用新型一个实施例的示意图。
17.图3是本实用新型一个实施例的爆炸示意图。
18.图4是本实用新型一个实施例另一个角度的爆炸示意图。
具体实施方式
19.以下结合附图实施例对本实用新型作进一步详细描述。
20.结合附图1至4,一种双头桁架小车,所述桁架小车包括一个带动力的横梁活动导轨架1和活设于横梁活动导轨架1上的小车平台2,所述横梁活动导轨架1上设有一个y轴向导轨3,所述小车平台2滑设在y轴向导轨3上,所述小车平台2上设有两条可以在z轴方向上下活动的夹持机械臂4,所述夹持机械臂4的头端设有套圈机械手5;所述夹持机械臂4包括一个杆体6,所述杆体6与小车平台2接触处设有正向导轨条7,所述小车平台2上设有第一擒拿装置抱住正向导轨条7;所述横梁活动导轨架1的动力机构为一个x轴驱动电机8,所述小车平台2设有驱动小车平台2的y轴驱动电机9、驱动夹持机械臂4的z轴驱动电机10。
21.为进一步强化夹持机械臂4上下运行的稳定程度,所述杆体6侧面还设有侧向导轨条11,所述小车平台2上设有一个第二擒拿装置12抱住侧向导轨条11。
22.结合附图3,一种第二擒拿装置12的设置方式,所述小车平台2靠夹持机械臂4一侧设有一个伸出架13,所述第二擒拿装置12设于伸出架13上。
23.为了遮盖住伸出架13,还包括一个桥接在夹持机械臂4上的盖壳14,所述盖壳14中留出夹持机械臂4的通道,所述盖壳14盖在夹持机械臂4上,且伸出架13位于且盖壳14中。
24.对机械臂上下结构进行调节,所述杆体6上设有与z轴齿条15,所述小车平台2上设有z轴驱动电机10,所述z轴驱动电机10的头端设有与z轴齿条15啮合的z轴齿轮16,所述z轴齿轮16位于盖壳14内。
25.一种x轴的驱动方式优选,所述x轴驱动电机8头端设有x轴齿轮17与大梁上的x轴齿条18啮合传动。
26.一种y轴的驱动方式优选,所述横梁活动导轨架1设有与y轴导轨19平行的y轴齿条20,所述小车平台2中部头向下设有一个y轴驱动电机9,所述y轴驱动电机9的头端设有与y
轴齿条20啮合的y轴齿轮。
27.本实施例使用方法是将双头桁架小车安装在桁架21的两条x轴大梁导轨上,然后在横梁活动导轨架1的x轴驱动电机8驱动下,x轴齿轮17与大梁上的x轴齿条18啮合传动,完成在x轴方向上的运动;小车平台2在横梁活动导轨架1行使y向移动,可以方便的在y方向上完成小车平台2的运动;在z轴的竖向运动上,两个夹持机械臂4在小车平台2的z轴驱动电机和杆体6的齿条作用下,上下活动,完成z轴方向的运动。
28.本实施例的有益效果在于:1、具有两条夹持机械臂,在一个机械臂完成上料夹持的过程中,也不影响下料过程中机械臂的使用,方便了整个桁架小车的运输。2、桁架小车z轴的夹持机械臂采用正面和侧面设置导轨和擒抱导轨的结构,来实现夹持机械臂的上下活动稳定运行,采用两组导轨设置下,导轨上下活动精度高,抗干涉能力强。
技术特征:
1.一种双头桁架小车,其特征在于:所述桁架小车包括一个带动力的横梁活动导轨架和活设于横梁活动导轨架上的小车平台,所述横梁活动导轨架上设有一个y轴向导轨,所述小车平台滑设在y轴向导轨上,所述小车平台上设有两条可以在z轴方向上下活动的夹持机械臂,所述夹持机械臂的头端设有套圈机械手;所述夹持机械臂包括一个杆体,所述杆体与小车平台接触处设有正向导轨条,所述小车平台上设有第一擒拿装置抱住正向导轨条;所述横梁活动导轨架的动力机构为一个x轴驱动电机,所述小车平台设有驱动小车平台的y轴驱动电机、驱动夹持机械臂的z轴驱动电机。2.根据权利要求1所述的双头桁架小车,其特征在于:所述杆体侧面还设有侧向导轨条,所述小车平台上设有一个第二擒拿装置抱住侧向导轨条。3.根据权利要求2所述的双头桁架小车,其特征在于:所述小车平台靠夹持机械臂一侧设有一个伸出架,所述第二擒拿装置设于伸出架上。4.根据权利要求3所述的双头桁架小车,其特征在于:还包括一个桥接在夹持机械臂上的盖壳,所述盖壳中留出夹持机械臂的通道,所述盖壳盖在夹持机械臂上,且伸出架位于且盖壳中。5.根据权利要求4所述的双头桁架小车,其特征在于:所述z轴所述杆体上设有与z轴齿条,所述小车平台上设有z轴驱动电机,所述z轴驱动电机的头端设有与z轴齿条啮合的z轴齿轮,所述z轴齿轮位于盖壳内。6.根据权利要求1所述的双头桁架小车,其特征在于:所述x轴驱动电机头端设有x轴齿轮与大梁上的x轴齿条啮合传动。7.根据权利要求1所述的双头桁架小车,其特征在于:所述横梁活动导轨架设有与y轴导轨平行的y轴齿条,所述小车平台中部头向下设有一个y轴驱动电机,所述y轴驱动电机的头端设有与y轴齿条啮合的y轴齿轮。
技术总结
一种双头桁架小车,所述桁架小车包括一个带动力的横梁活动导轨架和活设于横梁活动导轨架上的小车平台,所述横梁活动导轨架上设有一个Y轴向导轨,所述小车平台滑设在Y轴向导轨上,所述小车平台上设有两条可以在Z轴方向上下活动的夹持机械臂,所述夹持机械臂的头端设有套圈机械手;所述夹持机械臂包括一个杆体,所述杆体与小车平台接触处设有正向导轨条,所述小车平台上设有第一擒拿装置抱住正向导轨条。本实用新型的有益效果在于:具有两条夹持机械臂,在一个机械臂完成上料夹持的过程中,也不影响下料过程中机械臂的使用,方便了整个桁架小车的运输。桁架小车的运输。桁架小车的运输。
技术研发人员:李钦昌
受保护的技术使用者:慈溪市中创自动化科技有限公司
技术研发日:2022.07.07
技术公布日:2022/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1