一种关节机器人用运输装置的制作方法
1.本技术涉及运输技术领域,具体公开了一种关节机器人用运输装置。
背景技术:
2.关节机器人,也称关节机械手臂或多关节机器人,其各个关节的运动都是转动,与人的手臂类似,关节机器人是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业,比如:自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。
3.减振器的结构是带有活塞的活塞杆插入筒内,在筒中充满油,活塞上有节流孔,使得被活塞分隔出来的两部分空间中的油可以互相补充,阻尼就是在具有粘性的油通过节流孔时产生的,节流孔越小,阻尼力越大,油的黏度越大,阻尼力越大;减振器按其结构可分为双筒式和单筒式,双筒式是指减振器有内外两个筒,活塞在内筒中运动,由于活塞杆的进入与抽出,内筒中油的体积随之增大与收缩,因此要通过与外筒进行交换来维持内筒中油的平衡。
4.因为关节机器人的特殊性,在运输过程容易受到外力而损坏,因此,发明人提出了一种关节机器人用运输装置,用以解决上述问题。
技术实现要素:
5.本实用新型的目的在于解决传统的运输装置容易造成关节机器人损坏的问题。
6.为了达到上述目的,本实用新型的基础方案提供一种关节机器人用运输装置,包括箱体和与箱体转动连接的箱门,所述箱体底部设有底座,所述箱体与底座之间设有若干减震弹簧,所述箱体底部固接有若干与底座滑动连接的用于保持箱体稳定的滑杆,所述箱体的内顶部可拆卸连接有减震部件,所述减震部件包括与箱体可拆卸连接的缸体和与缸体滑动连接的活塞杆,所述缸体内开有粘滞流体腔,所述活塞杆进入粘滞流体腔的一端设有活塞,所述活塞杆远离缸体的一端设有若干用于固定关节机器人的绑带,所述箱体内底面设有磁铁板,所述箱体其余内表面以及箱门靠近箱体的一面均设有保护软垫。
7.本基础方案的原理及效果在于:
8.1.与现有技术相比,本装置底部设置的磁铁板可以将关节机器人底部固定,因为关节机器人多由金属制成,磁铁板可以吸引金属制品,磁铁板提供了关节机器人一端的稳定性;关节机器人的另一端则由绑带将其固定在活塞杆上,在装置运输过程发生晃动时,因为缸体内开有粘滞流体腔,活塞杆在粘滞流体腔中活动可以起到减震的效果,以此来保护晃动过程的关节机器人;箱体内表面和箱门内表面设置的保护软垫对运输过程的关节机器人也起到了一定的保护作用,解决了传统的运输装置容易造成关节机器人损坏的问题。
9.2.与现有技术相比,本装置中的箱体与底座之间设有减震弹簧,在运输过程装置发生晃动时,减震弹簧起到减震作用,避免装置晃动而导致装置内的关节机器人受到损坏;且箱体底部还滑动连接了滑杆,使减震弹簧在工作时保持上下运动,避免左右晃动造成减
震弹簧的损坏,解决了传统的运输装置容易造成关节机器人损坏的问题。
10.与现有技术相比,本装置通过设置磁铁板和绑带实现关节机器人的固定,通过设置减震部件缓冲关节机器人在箱体内部受到的晃动,通过保护软垫进一步保护运输过程的关节机器人,通过设置减震弹簧缓冲装置受到的外力,通过设置滑杆保证装置上下方向运动,避免左右方向运动导致减震弹簧损坏,上述解决了传统的运输装置容易造成关节机器人损坏的问题。
11.进一步,所述箱体与箱门的连接处设有合页,所述箱门上远离合页的一侧设有卡扣。实现箱门与箱体的转动连接。
12.进一步,所述滑杆的自由端均设有凸块,所述底座上开有可供凸块进入的凹槽。实现滑杆与底座的滑动连接。
13.进一步,所述凹槽内设有用于防止凸块重力撞击的缓冲层。保护装置的零部件,以此提高装置的使用效果和使用寿命。
14.进一步,所述缓冲层具体为硅胶层。硅胶具有10至80的邵氏硬度范围,这就有充分的自由来选择所需的硬度,以最佳地实现特定的功能,硅胶还具有一定的黏度、撕裂强度和伸长度。
15.进一步,所述缸体与箱体的连接处设有螺纹头,所述箱体上开有可供螺纹头进入的螺纹槽。实现缸体与箱体的可拆卸连接。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
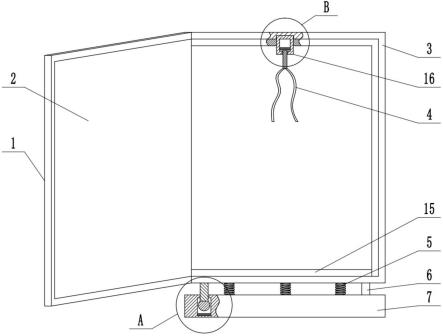
17.图1示出了本技术实施例提出的一种关节机器人用运输装置的正视图;
18.图2示出了本技术实施例提出的一种关节机器人用运输装置的局部a示意图;
19.图3示出了本技术实施例提出的一种关节机器人用运输装置的局部b示意图。
具体实施方式
20.为更进一步阐述本实用新型为实现预定实用新型目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本实用新型的具体实施方式、结构、特征及其功效,详细说明如后。
21.说明书附图中的附图标记包括:箱门1、保护软垫2、箱体3、绑带4、减震弹簧5、滑杆6、底座7、凹槽8、凸块9、缓冲层10、缸体11、活塞12、活塞杆13、粘滞流体腔14、磁铁板15、减震部件16。
22.实施例如图1所示:
23.一种关节机器人用运输装置,包括箱体3和与箱体3转动连接的箱门1,具体的:箱体3与箱门1的连接处设有合页,箱门1上远离合页的一侧设有卡扣,实现箱门1与箱体3的转动连接。
24.箱体3底部设有底座7,箱体3与底座7之间设有九根减震弹簧5,在运输过程装置发
生晃动时,减震弹簧5起到减震作用,避免装置晃动而导致装置内的关节机器人受到损坏,箱体3底部固接有四根与底座7滑动连接的用于保持箱体3稳定的滑杆6,使减震弹簧5在工作时保持上下运动,避免左右晃动造成减震弹簧5的损坏。
25.具体的如图2所示:滑杆6的自由端均设有凸块9,底座7上开有可供凸块9进入的凹槽8,实现滑杆6与底座7的滑动连接;凹槽8内设有用于防止凸块9重力撞击的缓冲层10,保护装置的零部件,以此提高装置的使用效果和使用寿命,具体的:缓冲层10具体为硅胶层。硅胶具有10至80的邵氏硬度范围,这就有充分的自由来选择所需的硬度,以最佳地实现特定的功能,硅胶还具有一定的黏度、撕裂强度和伸长度。
26.箱体3内底面设有磁铁板15,箱体3其余内表面以及箱门1靠近箱体3的一面均设有保护软垫2,因为关节机器人多由金属制成,磁铁板15可以吸引金属制品,磁铁板15提供了关节机器人一端的稳定性;箱体3内表面和箱门1内表面设置的保护软垫2对运输过程的关节机器人也起到了一定的保护作用。
27.箱体3的内顶部可拆卸连接有减震部件16,具体的:缸体11与箱体3的连接处设有螺纹头,箱体3上开有可供螺纹头进入的螺纹槽,实现缸体11与箱体3的可拆卸连接,如图3所示:减震部件16包括与箱体3可拆卸连接的缸体11和与缸体11滑动连接的活塞杆13,缸体11内开有粘滞流体腔14,活塞杆13进入粘滞流体腔14的一端设有活塞12,活塞杆13远离缸体11的一端设有若干用于固定关节机器人的绑带4,关节机器人的另一端则由绑带4将其固定在活塞杆13上,在装置运输过程发生晃动时,因为缸体11内开有粘滞流体腔14,活塞杆13在粘滞流体腔14中活动可以起到减震的效果,以此来保护晃动过程的关节机器人。
28.具体实现过程:第一步,将关节机器人的底部吸附在磁铁板15上,关节机器人的另一端用绑带4固定在活塞杆13的一端,关闭箱门1即可进行运输,第二步,在运输过程发生晃动时,减震部件16中的活塞杆13在粘滞流体腔14中做上下运动,起到减震作用,保护箱体3内部的关节机器人,箱体3内表面的保护软垫2防止关节机器人因晃动碰撞壁面,进一步保护了关节机器人;减震弹簧5用于缓冲整个装置受到的震动力,滑杆6保证了减震瘫痪只能上下方向运动,避免左右运动进而造成减震弹簧5损坏。
29.本装置通过设置磁铁板15和绑带4实现关节机器人的固定,通过设置减震部件16缓冲关节机器人在箱体3内部受到的晃动,通过保护软垫2进一步保护运输过程的关节机器人,通过设置减震弹簧5缓冲装置受到的外力,通过设置滑杆6保证装置上下方向运动,避免左右方向运动导致减震弹簧5损坏,上述解决了传统的运输装置容易造成关节机器人损坏的问题。
30.以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭示如上,然而并非用以限定本实用新型,任何本领域技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1