一种转运机器人及其挂篮的制作方法
1.本实用新型涉及硅片生产,尤其涉及一种转运机器人及其挂篮。
背景技术:
2.刚刚完成生产的单晶硅片,在其表面尤其是在侧面会附着大量生产中产生的印记,这些印记对单晶硅片的外观影响很大,因此在在单晶硅片生产后需要对单晶硅片进行清洗。
3.清洗后的单晶硅片需要转运至分选机对单晶硅片进行分选,最传统的转运方式是依靠人力进行,但是依靠人力转运存在如下缺点:1、转运作业劳动强度大,仅靠人力转运转运效率低;2、由于劳动强度大,导致工人的流动性大,工人的人力成本很高,也不便于企业进行生产管理。
4.为了解决人力转运的问题,逐渐出现了自动化的转运装置,现有的转运装置,设置用于容纳单晶硅片的挂篮,通过转运来达到转运单晶硅片的目的。但是现有的转运装置存在如下问题:在容纳单晶硅片后,挂篮挂篮的位置可能会发生偏移,导致转运部件不能顺利夹取挂篮进而进行转运,使得生产经常陷入停顿,影响企业生产效率。
技术实现要素:
5.实用新型目的:本实用新型的目的是提供一种能够高效抓取和转运挂篮的转运机器人及其挂篮。
6.技术方案:本实用新型所述的一种转运机器人及其挂篮,包括挂篮和机器手,所述挂篮的上下两端分别固定设置一块端板,挂篮的任意两个相对的侧面固定设置若干块相对的连接板,所述连接板的上下两端分别与端板固定连接,所述连接板远离挂篮的一侧开设滑槽;所述机器手内置带有坐标系的控制器,机器手的终端设置用于夹取挂篮的夹取装置,所述夹取装置包括横向气缸,所述横向气缸的左右两个输出端分别固定连接夹取板,所述夹取板的底部靠近横向气缸的一侧固定设置用于与滑槽相对应的夹取块。挂篮中与设置限位装置的侧面相对的侧面设置用于放入单晶硅片的开口;机器手内置的控制器带有坐标系,横向气缸的左右两个输出端张开;当需要夹取挂篮时,机器手的终端在控制器控制下移动至指定坐标点后,横向气缸的左右两个输出端带动夹取板向内收缩,直至夹取块与滑槽形成滑动连接,夹取装置向上移动,直至夹取块与滑槽的顶端相抵,以此实现夹取装置夹取挂篮并进行转运。
7.进一步地,所述横向气缸的下方滑动设置用于与挂篮的端板抵接的抵板,所述抵板能够调整夹取板与缸底板的相对位置,以方便夹取块更好地进入滑槽与滑槽形成滑动连接。
8.进一步地,所述横向气缸的底端固定设置缸底板,所述缸底板内滑动设置若干根滑杆,所述滑杆的底端与抵板固定连接,滑杆的外周套设弹簧,所述弹簧的上下两端分别与缸底板的底端及抵板的顶端抵接。设置弹簧能辅助抵板调整,以方便夹取块更好地进入滑
槽与滑槽形成滑动连接。
9.进一步地,所述挂篮的两个端板上分别设置若干个用于旋转机构锁定的锁定凸起。
10.进一步地,所述挂篮中与设置连接板的侧面相邻的任意一个侧面设置用于限位单晶硅片的限位装置。所述限位装置可以是间隔设置的若干根限位杆,或者是开设若干个通口的限位板。
11.有益效果:本实用新型与现有技术相比,具有如下优点:当单晶硅片被全部转入挂篮后,挂篮的端板位置是唯一的,端板的位置坐标被录入进机器手内置的控制器,控制器控制机器手的夹取装置夹取挂篮,并将挂篮转运至指定坐标。在夹取、转运的过程中,挂篮的位置都是唯一的,不会出现挂篮位置偏移的情况,使得机器手能够高效抓取和转运挂篮,避免生产经常陷入停顿,提高企业生产效率。
附图说明
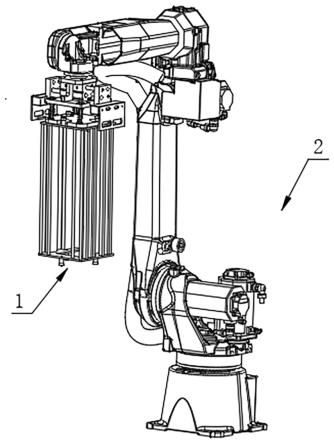
12.图1为本实用新型的立体图;
13.图2为本实用新型中机器手的立体图;
14.图3为本实用新型中机器手夹取装置的立体图;
15.图4为本实用新型中挂篮的结构示意图;
16.其中:1、挂篮;11、端板;12、连接板;121、滑槽;13、限位杆;14、锁定凸起;2、机器手;3、夹取装置;31、上接板;32、横向气缸;33、夹取板;331、夹取块;34、缸底板;35、滑杆;36、抵板。
具体实施方式
17.下面结合附图对本实用新型的技术方案作进一步说明。
18.参见附图1~图4,本实用新型所示的一种转运机器人及其挂篮1,包括挂篮1和机器手2,挂篮1的上下两端分别固定设置一块端板11,挂篮1的左侧面和右侧面分别固定设置两块相对的连接板12,连接板12的上下两端分别与端板11固定连接,连接板12远离挂篮1的一侧开设滑槽121,挂篮1的两个端板11上分别设置一个锁定凸起14,挂篮1的后侧面设置四根用于限位单晶硅片的限位杆13,挂篮1的前侧面设置用于放入单晶硅片的开口;机器手2为六轴机器人,机器手2内置带有坐标系的控制器(未画出),机器手2的终端为旋转轴,夹取装置3包括与旋转轴固定连接的上接板31,上接板31底端固定设置横向气缸32,横向气缸32的左右两个输出端分别固定连接夹取板33,夹取板33的底部靠近横向气缸32的一侧固定设置用于与滑槽121相对应的夹取块331,横向气缸32的底端固定设置缸底板34,缸底板34内滑动设置若干根滑杆35,滑杆35的底端与抵板36固定连接,滑杆35的外周套设弹簧,弹簧的上下两端分别与缸底板34的底端及抵板36的顶端抵接。
19.机器手2内置的控制器带有坐标系,横向气缸32的左右两个输出端张开;当需要夹取挂篮1时,机器手2的终端在控制器控制下移动至指定坐标点后,横向气缸32的左右两个输出端带动夹取板33向内收缩,直至夹取块331与滑槽121形成滑动连接,夹取装置3向上移动,直至夹取块331与滑槽121的顶端相抵,以此实现夹取装置3夹取挂篮1并进行转运。
技术特征:
1.一种转运机器人及其挂篮,其特征在于:包括挂篮(1)和机器手(2),所述挂篮(1)的上下两端分别固定设置一块端板(11),挂篮(1)的任意两个相对的侧面固定设置若干块相对的连接板(12),所述连接板(12)的上下两端分别与端板(11)固定连接,所述连接板(12)远离挂篮(1)的一侧开设滑槽(121);所述机器手(2)内置带有坐标系的控制器,机器手(2)的终端设置夹取装置(3),所述夹取装置(3)包括横向气缸(32),所述横向气缸(32)的左右两个输出端分别固定连接夹取板(33),所述夹取板(33)的底部靠近横向气缸(32)的一侧固定设置用于与滑槽(121)相对应的夹取块(331)。2.根据权利要求1所述的一种转运机器人及其挂篮,其特征在于:所述横向气缸(32)的下方滑动设置抵板(36)。3.根据权利要求2所述的一种转运机器人及其挂篮,其特征在于:所述横向气缸(32)的底端固定设置缸底板(34),所述缸底板(34)内滑动设置若干根滑杆(35),所述滑杆(35)的底端与抵板(36)固定连接。4.根据权利要求3所述的一种转运机器人及其挂篮,其特征在于:所述滑杆(35)的外周套设弹簧,所述弹簧的上下两端分别与缸底板(34)的底端及抵板(36)的顶端抵接。5.根据权利要求1所述的一种转运机器人及其挂篮,其特征在于:所述挂篮(1)的两个端板(11)上分别设置若干个锁定凸起(14)。6.根据权利要求1所述的一种转运机器人及其挂篮,其特征在于:所述挂篮(1)中与设置连接板(12)的侧面相邻的任意一个侧面设置限位装置。
技术总结
本实用新型公开了一种转运机器人及其挂篮,包括挂篮和机器手,挂篮的上下两端分别固定设置一块端板,挂篮的任意两个相对的侧面固定设置若干块相对的连接板,连接板的上下两端分别与端板固定连接,连接板远离挂篮的一侧开设滑槽;机器手内置带有坐标系的控制器,机器手的终端设置用于夹取挂篮的夹取装置,夹取装置包括横向气缸,横向气缸的左右两个输出端分别固定连接夹取板,夹取板的底部靠近横向气缸的一侧固定设置用于与滑槽相对应的夹取块。本实用新型的目的是提供一种能够高效抓取和转运挂篮的转运机器人及其挂篮。运挂篮的转运机器人及其挂篮。运挂篮的转运机器人及其挂篮。
技术研发人员:黄鹏杰
受保护的技术使用者:苏州协鑫光伏科技有限公司
技术研发日:2022.09.06
技术公布日:2023/1/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1