一种机械臂结构
1.本实用新型涉及假肢关节传动技术领域,尤其涉及一种机械臂结构。
背景技术:
2.随着工业技术的发展,工业机器人广泛参与到工业生产的各个环节中。机械抓取是工业机器人完成产品的拿取或投放的主要操作任务,而在机械抓取的过程中,拿取或投放这一系列动作是通过各个机械关节的活动来实现的。但目前的机械臂组件结构复杂,并且无法进行多方向、多角度的抓取,无法实现如同人的上肢般活动自如。
技术实现要素:
3.针对上述机械臂结构无法进行多方向、多角度的灵活抓取操作,本实用新型提供了一种机械臂结构。
4.为了解决上述技术问题,本实用新型采用以下技术方案:
5.一种机械臂结构,包括旋转轴关节组件、下臂轴关节组件、上臂轴关节组件、球腕关节组件、抓取机械手组件,所述旋转轴关节组件通过舵机以及转动轴与所述下臂轴关节组件传动连接,所述下臂轴关节组件通过舵机以及下臂关节连杆与所述上臂轴关节组件传动连接,所述上臂轴关节组件通过舵机以及小臂关节连杆与所述球腕关节组件传动连接,所述球腕关节组件通过舵机架与所述抓取机械手组件可拆卸固定连接,所述抓取机械手组件利用丝杠电机进行夹持或投放。
6.进一步地,所述旋转轴关节组件包括第一舵机、安装基座、第一联轴器以及水平转动轴,所述第一舵机的外壳与所述安装基座可拆卸固定连接,所述第一舵机的舵盘通过所述第一联轴器与所述水平转动轴的一端传动连接,所述水平转动轴的另一端与所述下臂轴关节组件可拆卸固定连接,所述第一舵机可带动所述下臂轴关节组件转动。
7.进一步地,所述下臂轴关节组件包括下臂轴u型架、横轴、下臂关节连杆以及第六舵机,所述水平转动轴与所述下臂轴u型架的顶壁可拆卸固定连接,可带动所述下臂轴u型架转动,所述横轴位于所述下臂轴u型架内,两端分别与所述下臂轴u型架转动连接,所述横轴上设置有轴架,所述下臂关节连杆与所述轴架可拆卸固定连接,所述第六舵机位于回型架内,并通过所述回型架与所述下臂轴u型架的侧壁可拆卸固定连接,所述第六舵机的舵盘通过第三联轴器与所述横轴传动连接,带动所述下臂关节连杆转动。
8.进一步地,所述上臂轴关节组件包括第二舵机、第三舵机、第二舵机架、上臂轴u型架以及小臂关节连杆,所述第二舵机架与所述下臂关节连杆可拆卸固定连接,所述第二舵机设置在所述第二舵机架内,所述第二舵机的舵盘与所述上臂轴u型架的侧壁可拆卸固定连接,所述第二舵机带动所述上臂轴u型架转动,所述第三舵机的外壳与所述上臂轴u型架的顶壁可拆卸固定连接,所述第三舵机的舵盘连接有第二联轴器,所述小臂关节连杆的一端套接在所述第二联轴器上。
9.进一步地,所述球腕关节组件包括第四舵机、第五舵机、第四舵机架以及第五舵机
架,所述第四舵机设置在所述第四舵机架内,所述第四舵机架的一侧与所述第二联轴器可拆卸固定连接,所述第五舵机设置在所述第五舵机架内,所述第四舵机通过轴连接块与所述第五舵机连接。
10.进一步地,所述第四舵机架外固定有呈z字型的第一上挡板以及呈z字型的第二上挡板,所述第一上挡板与第二上挡板连接有第三上挡板以及第四上挡板,第一上挡板、第二上挡板、第三上挡板以及第四上挡板形成第一容纳腔,所述第四舵机的传动轴连接有第一带轮,所述第一带轮通过第一同步带连接有第二带轮,所述第二带轮设置在所述第一容纳腔内,所述第二带轮具有第一传动轴。所述第五舵机架外固定有呈z字型的第一下挡板以及呈z字型的第二下挡板,所述第一下挡板与第二下挡板连接有第三下挡板以及第四下挡板,第一下挡板、第二下挡板、第三下挡板以及第四下挡板形成第二容纳腔,所述第五舵机的传动轴连接有第三带轮,所述第三带轮通过第二同步带连接有第四带轮,所述第四带轮设置在所述第二容纳腔内,所述第四带轮具有第二传动轴。所述第一传动轴通过所述轴连接块与所述第二传动轴连接。
11.进一步地,所述抓取机械手组件包括丝杠电机、外框、第一抓取部、第二抓取部、连接杆以及连杆杆组,所述外框的一侧与所述第五舵机架可拆卸固定连接,所述丝杠电机固定在所述外框内,所述丝杠电机的丝杠朝向所述外框的另一侧,所述丝杠电机的丝杠上相适配连接有连接板,所述连接板可相对于所述丝杠移动。所述第一抓取部通过第一连接轴与所述外框的上侧铰接,所述连接杆的一端通过第二连接轴与所述连接板铰接,另一端通过第三连接轴与所述第一抓取部的内侧铰接。所述第二抓取部通过第四连接轴与所述外框的下侧铰接,所述连杆杆组的一端通过第五连接轴与所述连接板铰接,另一端通过第六连接轴与所述第二抓取部的内侧铰接。
12.本实用新型的有益效果是:本实用新型采用拟人化的结构设计,各关节的活动通过舵机来控制运行状态、方位角度等,使得控制更加精准,实现如同人的上肢般活动自如,以便更好的夹持或投放物品。旋转轴关节组件可带动所述上臂轴关节组件进行360
°
转动,下臂轴关节组件可带动所述关节连杆进行180
°
转动,来近似模拟人体肩关节的活动状态;上臂轴关节组件可带动球腕关节组件机械进行360
°
转动,来近似模拟人体肘关节的活动状态;球腕关节组件间可进行100
°
转动,来近似模拟人体腕关节的活动状态;并通过若干舵机实现多方向、多角度的准确夹持或投放操作。
附图说明
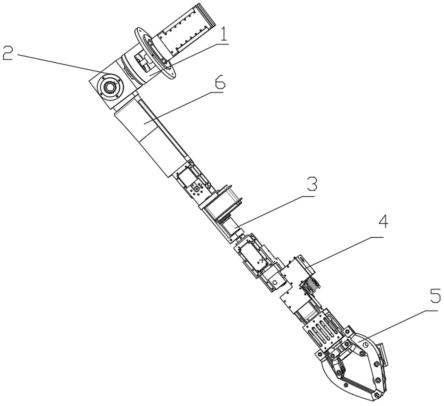
13.图1所示为本实用新型一种实施方式的结构原理示意图。
14.图2所示为图1的一侧视图。
15.图3所示为旋转轴关节组件以及下臂轴关节组件的结构示意图。
16.图4所示为图3的一侧视图。
17.图5所示为球腕关节组件的结构示意图。
18.图6所示为图5的一侧视图。
19.图7所示为抓取机械手组件。
20.附图标记说明:1、旋转轴关节组件;2、下臂轴关节组件;3、上臂轴关节组件;4、球腕关节组件;5、抓取机械手组件;6、下臂关节连杆;7、第一舵机;8、第二舵机;9、第三舵机;
10、第四舵机;11、第五舵机;12、丝杠电机;13、安装基座;14、第一抓取部;15、第二抓取部;16、第四舵机架;17、第一上挡板;18、第二上挡板;19、第一下挡板;20、第二下挡板;21、第一带轮;22、第二带轮;23、第一同步带;24、第四带轮;25、第三带轮;26、第二同步带;27、第三下挡板;28、第五舵机架;29、轴连接块;30、第三上挡板;31、水平转动轴;32、第一联轴器;33、回型架;34、轴架;35、横轴;36、小臂关节连杆;37、第二联轴器;38、连杆杆组;39、连接杆;40、外框;41、第四上挡板;42、下臂轴u型架;43、第三联轴器;44、第六舵机;45、第二舵机架;46、上臂轴u型架;47、第一传动轴;48、第二传动轴;49、第一连接轴;50、第二连接轴;51、第五连接轴;52、第六连接轴;53、第四连接轴;54、第三连接轴;55、第四下挡板;56、连接板。
具体实施方式
21.本实用新型公开了一种机械臂结构,以下结合附图对本实用新型的一种实施方式作具体描述。
22.结合图1和图2所示,包括旋转轴关节组件1、下臂轴关节组件2、上臂轴关节组件3、球腕关节组件4、抓取机械手组件5。旋转轴关节组件1包括第一舵机7、安装基座13、第一联轴器32以及水平转动轴,第一舵机7的外壳与安装基座13可拆卸固定连接,第一舵机7的舵盘位于安装基座13内,第一舵机7的舵盘通过第一联轴器32与水平转动轴31的后端传动连接。
23.结合图3和图4所示,下臂轴关节组件2包括下臂轴u型架42、横轴35、下臂关节连杆6以及第六舵机44,水平转动轴31的前端与下臂轴u型架42的顶壁可拆卸固定连接,可带动下臂轴u型架42转动。横轴35位于下臂轴u型架42内,横轴35的两端分别与下臂轴u型架42转动连接,横轴35上固定有轴架34,下臂关节连杆6与轴架34可拆卸固定连接。第六舵机44位于回型架33内,并通过回型架33与下臂轴u型架42右侧的侧壁可拆卸固定连接。第六舵机44的舵盘通过第三联轴器43与横轴35传动连接,可带动下臂关节连杆6转动。
24.上臂轴关节组件3包括第二舵机8、第三舵机9、第二舵机架45、上臂轴u型架46以及小臂关节连杆36,第二舵机架45与下臂关节连杆6可拆卸固定连接,第二舵机8固定在第二舵机架45内。第二舵机8的前部外侧设置有上臂轴u型架46,第二舵机8的舵盘与上臂轴u型架46的右侧可拆卸固定连接,第二舵机8可带动上臂轴u型架46转动。第三舵机9的外壳与上臂轴u型架46的顶壁可拆卸固定连接,第三舵机9的舵盘朝向前侧,第三舵机9的舵盘连接有第二联轴器37,小臂关节连杆36的前部弯折并具有可与第二联轴器37相适配的通孔,小臂关节连杆36利用通孔套接在第二联轴器37上,对第二联轴器37进行支撑。
25.结合图5和图6所示,球腕关节组件4包括第四舵机10、第五舵机11、第四舵机架16以及第五舵机架28。第四舵机10可拆卸固定在第四舵机架16内,第四舵机架16的两侧分别可拆卸固定有呈z字型的第一上挡板17以及呈z字型的第二上挡板18,第一上挡板17与第二上挡板18连接有第三上挡板30以及第四上挡板41,第一上挡板17、第二上挡板18、第三上挡板30以及第四上挡板41形成第一容纳腔,第四舵机10的传动轴连接有第一带轮21,第一带轮21通过第一同步带23连接有第二带轮22,第二带轮22设置在第一容纳腔内,第二带轮22具有第一传动轴47。第五舵机11设置在第五舵机架28内,第五舵机架28外固定有呈z字型的第一下挡板19以及呈z字型的第二下挡板20,第一下挡板19与第二下挡板20连接有第三下挡板27以及第四下挡板55,第一下挡板19、第二下挡板20、第三下挡板27以及第四下挡板55
形成第二容纳腔,第五舵机11的传动轴连接有第三带轮25,第三带轮25通过第二同步带26连接有第四带轮24,第四带轮24设置在第二容纳腔内,第四带轮24具有第二传动轴48。第二带轮22的第一传动轴47通过轴连接块29与第四带轮24的第二传动轴48连接。
26.如图7所示,抓取机械手组件5包括丝杠电机12、外框40、第一抓取部14、第二抓取部15、连接杆39以及连杆杆组38,外框40的后部与第五舵机架28可拆卸固定连接,丝杠电机12可拆卸固定在外框40内,丝杠电机12的丝杠朝向前侧,丝杠电机12的丝杠上相适配连接有连接板56,连接板56可相对于丝杠进行前后移动。第一抓取部14通过第一连接轴49与外框40的上侧铰接,连接杆39的后端通过第二连接轴50与连接板56铰接,前端通过第三连接轴54与第一抓取部14的内侧铰接。第二抓取部15通过第四连接轴53与外框40的下侧铰接,连杆杆组38的后端通过第五连接轴51与连接板56铰接,前端通过第六连接轴52与第二抓取部15的内侧铰接。
27.本实用新型的运行方式为:第一舵机7的舵盘通过联轴器以及水平转动轴,与下臂关节组件中下臂轴u型架42的顶壁传动连接,下臂轴u型架42可相对于第一舵机7进行360
°
的旋转。第六舵机44的舵盘通过第三联轴器43与下臂轴u型架42内的横轴35传动连接,带动下臂关节连杆6进行转动,下臂关节连杆6可相对于下臂轴u型架42进行180
°
的转动。第二舵机8的舵盘带动上臂轴u型架46进行转动,上臂轴u型架46可相对于第二舵机8进行180
°
的转动。第三舵机9的舵盘通过第二联轴器37与第四舵机架16连接,第四舵机架16可相对于第三舵机9进行360
°
的旋转。球腕关节组件4中第一传动轴47通过轴连接块29与第二传动轴48连接,第五舵机11可相对于第四舵机10进行100
°
的转动。
28.本实用新型的有益效果是:本实用新型采用拟人化的结构设计,各关节的活动通过舵机来控制运行状态、方位角度等,使得控制更加精准,实现如同人的上肢般活动自如,以便更好的夹持或投放物品。旋转轴关节组件1可带动所述上臂轴关节组件3进行360
°
转动,下臂轴关节组件2可带动所述下臂关节连杆6进行180
°
转动,来近似模拟人体肩关节的活动状态;上臂轴关节组件3可带动球腕关节组件4机械进行360
°
转动,来近似模拟人体肘关节的活动状态;球腕关节组件4间可进行100
°
转动,来近似模拟人体腕关节的活动状态;各个组件之间设置有舵机增加动力,可实现多方向、多角度的准确夹持或投放操作。
29.当然,上述说明并非是对本实用新型的限制,本实用新型也并不仅限于上述举例,本技术领域的技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1