一种全自动蔬菜装袋装置中的进料系统的制作方法
1.本实用新型属于蔬菜加工技术领域,具体涉及一种全自动蔬菜装袋装置中的进料系统。
背景技术:
2.蔬菜是人们日常所需,而由于蔬菜的保存时间较短,无法根据需求随时食用,因此根据需求便会对蔬菜进行一定程度的加工并包装处理,从而有效的延长蔬菜的保存时间。
3.目前,蔬菜装袋过程自动化程度低,大部分操作需要人工参与,增加了人力工作且装菜效率较低,在人工装袋过程中还经常会出现蔬菜被污染的情况。
4.鉴于此,提出本实用新型。
技术实现要素:
5.本实用新型希望提供一种全自动蔬菜装袋装置中的进料系统,具体方案如下:
6.一种全自动蔬菜装袋装置中的进料系统,包括夹袋机构、开袋机构和进料机构,所述开袋机构设置在夹袋机构和进料机构之间,所述进料机构包括第二架体,所述第二架体一侧设有上下设置的第一漏斗、第二漏斗和第三漏斗,所述第一漏斗和第二漏斗底部设有可开合的挡片,所述第二漏斗上设有计量器。
7.所述夹袋机构设置在圆台上,所述夹袋机构包括两个对称设置的第一连接杆,所述第一连接杆一端设有第一伸缩电机和第一夹片,所述第一伸缩电机控制第一夹片开合,夹袋机构用于夹紧包装袋并会随着圆台的转动而到相应位置作相关的装袋操作。
8.所述第一连接杆的另一端设有齿轮,两个第一连接杆上的齿轮传动连接,所述圆台上设有第二伸缩电机,所述第二伸缩电机控制其中一个第一连接杆左右移动,从而带动第一连接杆上的齿轮转动,当夹袋机构夹紧包装袋后,利用第二伸缩电机能控制两个第一夹片间的距离,即齿轮传动向下时,第一夹片间的距离扩大,反之亦然,这样设置是为了将包装袋进料口的缝隙暴露出来并横向拉紧包装袋,便于后续的开袋,进料、排气和封口等操作。
9.所述第一夹片内侧设有保护层(pe膜),避免夹放包装袋时将其刮花,影响包装袋的美观。
10.所述开袋机构设置在圆台一侧,所述圆台上设有第三旋转电机,所述第三旋转电机上设有第三转动杆,所述第三转动杆上设有第五伸缩电机,所述开袋机构设置在第五伸缩电机的一端,所述第五伸缩电机控制开袋机构上下运动,第三旋转电机在圆台上进行45度的来回转动,同时设置第五伸缩电机便于把插片伸入包装袋内,为了在进入进料机构之前把包装袋的进料口扩大,便于后续进料、排气等操作。
11.所述开袋机构包括第六伸缩电机,所述第六伸缩电机一端设有第一连接块,所述第一连接块两端转动连接有第二连接杆,所述第二连接杆一端转动连接有第三连接杆,第三连接杆一端固定设置在第二连接块上,所述第二连接块一侧设有插片,所述第六伸缩电
机的伸缩运行带动第二连接杆和第三连接杆的转动,从而带动插片的开合,即第六伸缩电机的伸缩杆向前推动第一连接块运动时,第二连接杆向前转动,而第三连接杆向内靠拢,从而使得第二连接块和插片靠拢;反之,第六伸缩电机的伸缩杆向后收缩时插片会随之打开。
12.所述第三漏斗一侧设有第七伸缩电机,所述第七伸缩电机带动第三漏斗上下运动,用于将第三漏斗插入包装袋内,便于将蔬菜完全灌入包装袋内。
13.本实用新型的有益效果如下:
14.本技术提供的进料系统使得蔬菜装袋的进料过程自动化,减少了重复繁琐的人工工作,节省了人力资源且提高了包装效率和质量;同时利用机械化进料,避免了蔬菜在人工装袋过程中被污染的情况。
附图说明
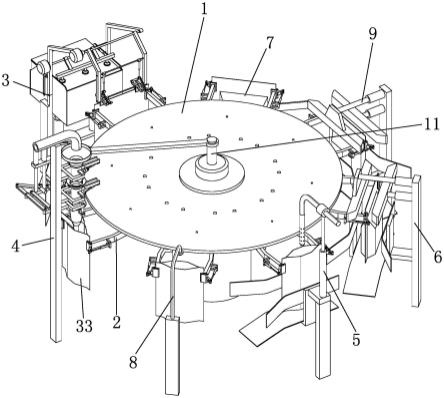
15.图1为本实用新型一种全自动蔬菜装袋装置的结构示意图一;
16.图2为本实用新型一种全自动蔬菜装袋装置的结构示意图二;
17.图3为本实用新型一种全自动蔬菜装袋装置的部分结构示意图一;
18.图4为本实用新型一种全自动蔬菜装袋装置的部分结构示意图二;
19.图5为本实用新型一种全自动蔬菜装袋装置中的进料系统中的夹袋机构的结构示意图;
20.图6为本实用新型一种全自动蔬菜装袋装置中的进料系统中的开袋机构的结构示意图;
21.图7为本实用新型一种全自动蔬菜装袋装置中的进料系统中的开袋机构的部分结构示意图一;
22.图8为本实用新型一种全自动蔬菜装袋装置中的进料系统中的开袋机构的部分结构示意图二;
23.图9为本实用新型一种全自动蔬菜装袋装置中的进料系统中的进料机构的结构示意图;
24.图10为本实用新型一种全自动蔬菜装袋装置中的进料系统中的进料机构的部分结构示意图;
25.图11为本实用新型一种全自动蔬菜装袋装置的部分结构示意图三;
26.图12为本实用新型一种全自动蔬菜装袋装置的部分结构示意图四;
27.其中标号:1为圆台,2为夹袋机构,3为上袋机构,4为进料机构,5为排气机构,6为封口机构,7为收集箱,8为检测机构,9为喷码机构,11为第三旋转电机,12为第三转动杆,13为第五伸缩电机,14为开袋机构,141为第六伸缩电机,142为第一连接块,143为第二连接杆,144为第三连接杆,145为第二连接块,146为插片,21为第一连接杆,22为第一伸缩电机,23为第一夹片,24为齿轮,25为第二伸缩电机,31为第一架体,32为储袋框,33为包装袋,34为第三伸缩电机,35为第一旋转电机,36为第二旋转电机,37为观察孔,38为感应器,351第一转动杆上,352为静电吸附盘,361为第二转动杆,362为夹持机构,363为第四伸缩电机,364为第二夹片,41为第二架体,42为第一漏斗,43为第二漏斗,44为第三漏斗,45为出料口,46为挡片,47为第七伸缩电机,48为计量器,51为第三架体,52为第八伸缩电机,53为抽气装置,61为第四架体,62为封口夹具,63为第二支撑板,64为导向板。
具体实施方式
28.下面结合具体实施方式对本实用新型作出进一步的说明。
29.在下面的描述中凡是涉及上、下、左、右、前和后的方向性(或者称方位性)的概念均是针对正在被描述的图所处的位置状态而言的,目的在于方便公众理解,因而不能将其理解为对本实用新型提供的技术方案的特别限定。
30.如图5-10所示,一种全自动蔬菜装袋装置中的进料系统,包括夹袋机构2、开袋机构14和进料机构4,开袋机构14设置在夹袋机构2和进料机构4之间,进料机构4包括第二架体41,第二架体41一侧设有上下设置的第一漏斗42、第二漏斗43和第三漏斗44,第一漏斗42和第二漏斗43底部设有可开合的挡片46(利用伸缩电机控制挡片46的开合),第二漏斗42上设有计量器48,用于监测每次装入包装袋33内的蔬菜质量。第三漏斗44一侧设有第七伸缩电机47,第七伸缩电机47带动第三漏斗44上下运动,用于将第三漏斗44插入包装袋33内,便于将蔬菜完全灌入包装袋33内。
31.夹袋机构2设置在圆台1上,夹袋机构2包括两个对称设置的第一连接杆21,第一连接杆21一端设有第一伸缩电机22和第一夹片23,第一伸缩电机22控制第一夹片23开合,夹袋机构2用于夹紧包装袋33并会随着圆台1的转动而到相应位置作相关的装袋操作。第一连接杆21的另一端设有齿轮24,两个第一连接杆21上的齿轮24传动连接,圆台1上设有第二伸缩电机25,第二伸缩电机25控制其中一个第一连接杆21左右移动,从而带动第一连接杆21上的齿轮24转动,当夹袋机构2夹紧包装袋33后,利用第二伸缩电机25能控制两个第一夹片23间的距离,即齿轮24传动向下时,第一夹片23间的距离扩大,反之亦然,这样设置是为了将包装袋33进料口的缝隙暴露出来并横向拉紧包装袋33,便于后续的开袋,进料、排气和封口等操作。第一夹片23内侧设有保护层(pe膜),避免夹放包装袋33时将其刮花,影响包装袋33的美观。
32.开袋机构14设置在圆台1一侧,圆台1上设有第三旋转电机11,第三旋转电机11上设有第三转动杆12,第三转动杆12上设有第五伸缩电机13,开袋机构14设置在第五伸缩电机13的一端,第五伸缩电机13控制开袋机构14上下运动,第三旋转电机11在圆台1上进行45度的来回转动,同时设置第五伸缩电机13便于把插片146伸入包装袋33内,为了在进入进料机构4之前把包装袋33的进料口扩大,便于后续进料、排气等操作。开袋机构14包括第六伸缩电机141,第六伸缩电机141一端设有第一连接块142,第一连接块142两端转动连接有第二连接杆143,第二连接杆143一端转动连接有第三连接杆144,第三连接杆144一端固定设置在第二连接块145上,第二连接块145一侧设有插片146,第六伸缩电机141的伸缩运行带动第二连接杆143和第三连接杆144的转动,从而带动插片146的开合,即第六伸缩电机141的伸缩杆向前推动第一连接块142运动时,第二连接杆143向前转动,而第三连接杆144向内靠拢,从而使得第二连接块145和插片146靠拢;反之,第六伸缩电机141的伸缩杆向后收缩时插片146会随之打开。
33.工作原理如下:
34.如图1-12所示,首先,将包装袋33置于第一架体31上的储袋框32内,储袋框32一侧设有观察孔37(用于观察储袋框32内包装袋33的剩余量,及时补充储袋框32内的包装袋33)和感应器38,通过第三伸缩电机34将包装袋33顶升到感应器38所在水平位置,当感应器38感应到包装袋33到达指定位置时,上袋机构3中的第一旋转电机35和第二旋转电机36开始
运作,通过第一转动杆351上的静电吸附盘352和第二转动杆361上的第二夹片364的配合将包装袋33依次夹取并放置在夹袋机构2的第一夹片23上(第二夹片364通过第四伸缩电机363的伸缩来控制开合,第一夹片23通过第一连接杆21上的第一伸缩电机22的伸缩来控制开合)。
35.通过圆台1的转动,夹袋机构2首先夹着包装袋33输送到开袋机构14处(输送过程中利用第二伸缩电机25能控制两个第一夹片23间的距离,即齿轮24传动向下时,第一夹片23间的距离扩大,反之亦然,这样设置是为了将包装袋33进料口的缝隙暴露出来并横向拉紧包装袋33,便于后续的开袋,装袋、排气和封口等操作),利用第五伸缩电机13将合拢的插片146伸入包装袋33内(第五伸缩电机13设置在第三旋转电机11的第三转动杆12上,第三旋转电机11在圆台1上只进行45度的来回转动,使得包装袋33在运输至进料机构4之前能先将袋口打开),然后张开插片146(即将开袋机构14中的第六伸缩电机141的伸缩杆向前推动第一连接块142运动时,第二连接杆143向前转动,而第三连接杆144向内靠拢,从而使得第二连接块145和插片146靠拢;反之,第六伸缩电机141的伸缩杆向后缩回第一连接块142时,插片146会随之打开),扩大包装袋33进料口后将插片146与包装袋33分离。
36.然后转动至进料机构4处,进料机构4中的进料管会将蔬菜先输送至第二架体41一侧的第一漏斗42内,再打开第一漏斗41底部的挡片46(利用伸缩电机控制挡片46的开合),将第一漏斗42中的部分蔬菜掉入第二漏斗43中,利用第二漏斗43一侧的计量器48监测到进入第二漏斗43中的蔬菜质量达到标准时,关闭第一漏斗42底部的挡片46,利用第七伸缩电机47将第三漏斗44插入包装袋33内后,打开第二漏斗43底部的挡片46,将一定质量的蔬菜装入包装袋33中(其中,第一漏斗42和第二漏斗43的出料口45呈倾斜设置的圆形,便于蔬菜的掉落,同时这样设置能更好的配合挡片46的开合)。
37.进料结束后,抬起第三漏斗44,使其与包装袋33分离,关闭第二漏斗43底部的挡片46。圆台1带动包装袋33继续转动经过检测机构8,若检测机构8的红外检测器检测到包装袋33内确实存在一定数量的蔬菜时,圆台1持续转动;若检测机构8未检测到包装袋33内的蔬菜,则圆台1停止转动,整个装袋装置都停止运作。最后包装袋33通过排气机构5中的抽气孔抽气(排气机构5设置在第三架体51上,且第三架体51上的第八伸缩电机52带动排气机构5中的抽气装置53升降,利用抽气装置53中的抽气孔对包装袋33进行排气操作,设置排气机构5能减少包装袋33内的氧气含量,增加包装袋33内蔬菜的保质期)、封口机构6(封口机构6设置在第四架体61上)中的封口夹具62封口和喷码机构9喷上相关信息后转动至收集箱7处,打开第一夹片23使得蔬菜装袋完毕后的包装袋33掉落至收集箱7内,然后该夹袋机构2会重新转回到上袋机构3处,进行下一个包装袋33的输送(第三架体51和第四架体61一侧还设有第二支撑板63和导向板64,圆台1旋转过程中通过导向板64能将包装袋33导向输送至排气机构5和封口机构6的相应位置进行排气操作和封口操作,第二支撑板63对装有蔬菜的包装袋33有一定的支持作用,避免出现包装袋33因重量过大破裂或从夹袋机构2的第一夹片23中滑落的现象)。
38.整个装袋过程中的圆台1是一直旋转不停歇,圆台1上的若干夹袋机构2会从上袋机构3开始,依次经过开袋机构14、进料机构4、检测机构8、排气机构5、封口机构6和喷码机构9,最后将装袋完毕后的包装袋33收集在收集箱7,此过程全自动化,减少了重复繁琐的人工工作,节省了人力资源且提高了包装效率和质量;且能将装袋装置设置在无菌密闭环境
下进行装袋操作,减少了蔬菜在装袋过程中被污染的情况,保障了食用者的安全健康。
39.上述实施方式仅用于解释说明本实用新型的发明构思,而非对本实用新型权利保护的限定,凡利用此构思对本实用新型进行非实质性的改动,均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1