一种堆叠动作自动对准的无人叉车的制作方法
本技术涉及堆叠动作自动对准的无人叉车,具体为一种堆叠动作自动对准的无人叉车。
背景技术:
1、堆叠动作自动对准的无人叉车是一种进行可以自动对准的快速完成堆叠动作的无需人进行驾驶的叉车。
2、现有技术中堆叠动作的叉车在使用的过程中,由于需要人员进行驾驶操作,导致堆叠动作的叉车驾驶,需要耗费大量的时间进行培训相应的驾驶操作人员,需要消耗大量的人力,影响了堆叠动作的叉车的经济效应。
3、为了解决堆叠动作的叉车需要人员进行驾驶的问题,现有的堆叠动作自动对准的无人叉车通过使用无人驾驶技术来解决上述的问题,但是,现有的堆叠动作自动对准的无人叉车在使用的过程中,由于操作方式过于复杂,导致操作不便,影响了现有的堆叠动作自动对准的无人叉车的工作效率。
技术实现思路
1、(一)解决的技术问题
2、本实用新型的目的在于提供一种堆叠动作自动对准的无人叉车,以解决上述背景技术中提出现有的堆叠动作自动对准的无人叉车的操控方式不佳,移动能力较差的问题。
3、(二)技术方案
4、为实现上述目的,本实用新型提供如下技术方案:一种堆叠动作自动对准的无人叉车,包括主体机构、传讯机构、叉车机构和移动机构,所述传讯机构位于主体机构的上端,所述叉车机构位于主体机构的左端,所述移动机构位于主体机构的下端,所述主体机构包括配重台、显示平台、显示屏幕、摄像头、发声板、操控板、操控按钮、触控板、usb接口和手机连接口,所述显示平台固定安装在配重台的上端,所述显示屏幕固定安装在显示平台的上端,所述摄像头固定安装在显示平台的上端,所述发声板固定安装在显示平台的左端,所述操控板固定安装在配重台的上端,所述触控板固定安装在操控板的上端,所述usb接口固定安装在操控板的上端,所述手机连接口固定安装在操控板的上端,所述移动机构包括移动底座、安装螺孔一、安装槽、移动电机、移动传动轴、移动轮和移动履带,所述移动底座固定安装在配重台的下端。
5、优选的,所述传讯机构包括安装端、连接固定端、电动推杆一、电推杆一和信号传讯端,所述安装端固定安装在配重台的上端,所述连接固定端固定安装在安装端的上端,所述电动推杆一固定安装在连接固定端的上端,通过对于主体机构和传讯机构的改进和安装,使得该堆叠动作自动对准的无人叉车的操控能力和传讯能力得以改进,在使用的过程中,可以便捷地有效地进行操控该堆叠动作自动对准的无人叉车,提高了该堆叠动作自动对准的无人叉车的工作效果。
6、优选的,所述电推杆一固定安装在电动推杆一的上端,所述信号传讯端固定安装在电推杆一的上端,通过对于电推杆一和信号传讯端的改进和安装,可以便捷地有效地进行操控该堆叠动作自动对准的无人叉车,提高了该堆叠动作自动对准的无人叉车的工作效果。
7、优选的,所述叉车机构包括安装连接柱、连接支撑柱、旋转丝杆、叉车头和校准装置,所述安装连接柱固定安装在配重台的左端,所述连接支撑柱固定安装在安装连接柱的上端,所述旋转丝杆固定安装在连接支撑柱的左端,通过对于叉车机构的改进和安装,使得该堆叠动作自动对准的无人叉车的自动对准能力得以改进,在日常使用的过程中,该堆叠动作自动对准的无人叉车在进行堆叠动作自动对准时,堆叠动作更加的快速,提高了该堆叠动作自动对准的无人叉车的工作效率。
8、优选的,所述叉车头固定安装在连接支撑柱的左端,所述校准装置固定安装在叉车头的左端,通过对于叉车头和校准装置的改进和安装,该堆叠动作自动对准的无人叉车在进行堆叠动作自动对准时,堆叠动作更加的快速,提高了该堆叠动作自动对准的无人叉车的工作效率。
9、优选的,所述安装螺孔一固定设置在移动底座的上端,所述安装槽固定设置在移动底座的上端,通过对于移动机构的改进和安装,使得该堆叠动作自动对准的无人叉车的机构能力得以改进,在日常使用的过程中,可以快速地将该堆叠动作自动对准的无人叉车按照要求移动,提高了该堆叠动作自动对准的无人叉车的工作效率。
10、优选的,所述移动电机固定安装在移动底座的下端,所述移动传动轴固定安装在移动电机的前端,通过对于移动电机和移动传动轴的改进和安装,可以快速地将该堆叠动作自动对准的无人叉车按照要求移动,提高了该堆叠动作自动对准的无人叉车的工作效率。
11、优选的,所述移动轮固定安装在移动传动轴的前端,所述移动履带固定安装在移动轮的前端,通过对于移动轮和移动履带的改进和安装,可以快速地将该堆叠动作自动对准的无人叉车按照要求移动,提高了该堆叠动作自动对准的无人叉车的工作效率。
12、与现有技术相比,本实用新型的有益效果是:
13、1、该堆叠动作自动对准的无人叉车,通过对于主体机构和传讯机构的改进和安装,使得该堆叠动作自动对准的无人叉车的操控能力和传讯能力得以改进,在使用的过程中,可以便捷地有效地进行操控该堆叠动作自动对准的无人叉车,提高了该堆叠动作自动对准的无人叉车的工作效果;
14、2、该堆叠动作自动对准的无人叉车,通过对于叉车机构的改进和安装,使得该堆叠动作自动对准的无人叉车的自动对准能力得以改进,在日常使用的过程中,该堆叠动作自动对准的无人叉车在进行堆叠动作自动对准时,堆叠动作更加的快速,提高了该堆叠动作自动对准的无人叉车的工作效率;
15、3、该堆叠动作自动对准的无人叉车,通过对于移动机构的改进和安装,使得该堆叠动作自动对准的无人叉车的机构能力得以改进,在日常使用的过程中,可以快速地将该堆叠动作自动对准的无人叉车按照要求移动,提高了该堆叠动作自动对准的无人叉车的工作效率。
技术特征:
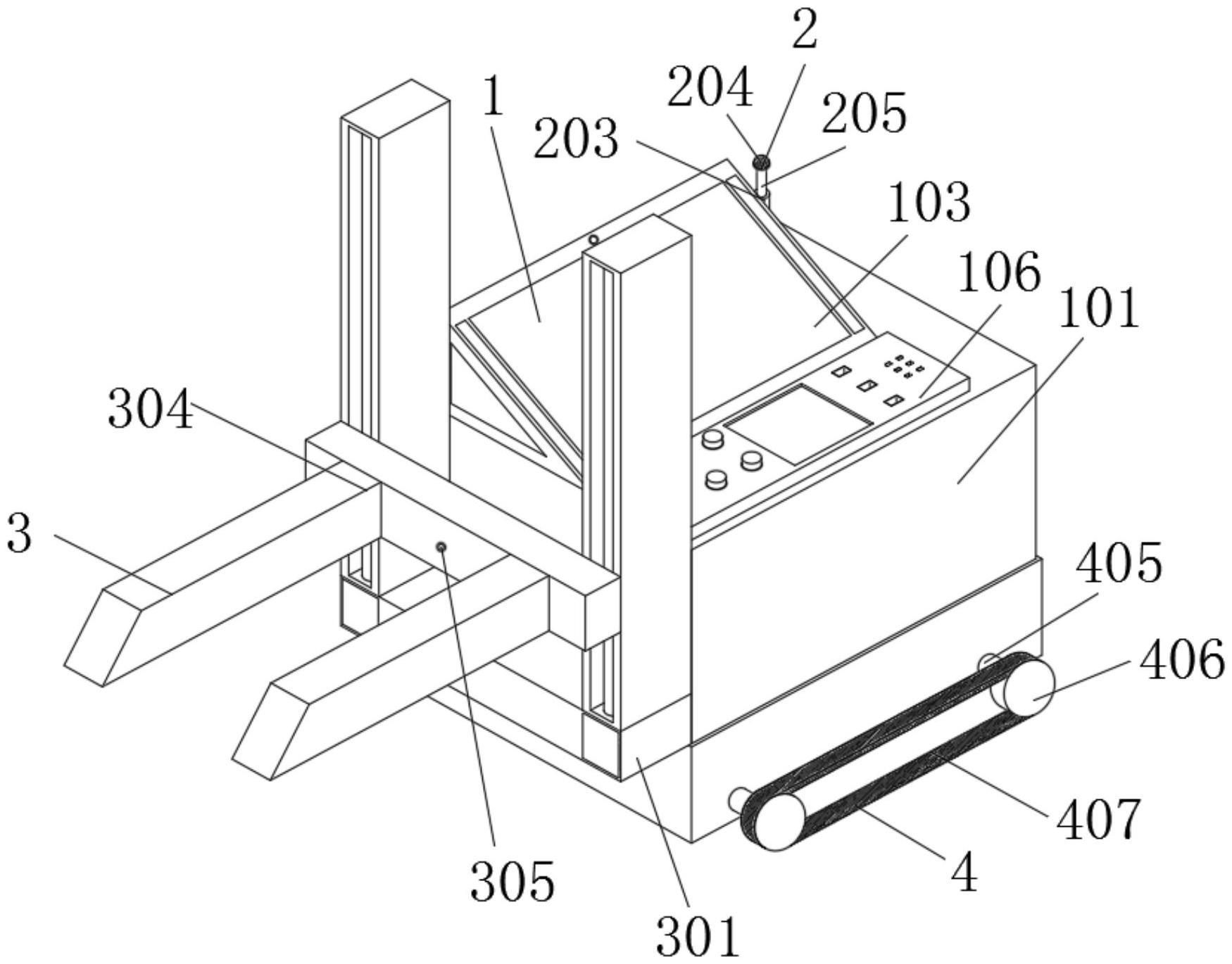
1.一种堆叠动作自动对准的无人叉车,包括主体机构(1)、传讯机构(2)、叉车机构(3)和移动机构(4),其特征在于:所述传讯机构(2)位于主体机构(1)的上端,所述叉车机构(3)位于主体机构(1)的左端,所述移动机构(4)位于主体机构(1)的下端,所述主体机构(1)包括配重台(101)、显示平台(102)、显示屏幕(103)、摄像头(104)、发声板(105)、操控板(106)、操控按钮(107)、触控板(108)、usb接口(109)和手机连接口(110),所述显示平台(102)固定安装在配重台(101)的上端,所述显示屏幕(103)固定安装在显示平台(102)的上端,所述摄像头(104)固定安装在显示平台(102)的上端,所述发声板(105)固定安装在显示平台(102)的左端,所述操控板(106)固定安装在配重台(101)的上端,所述触控板(108)固定安装在操控板(106)的上端,所述usb接口(109)固定安装在操控板(106)的上端,所述手机连接口(110)固定安装在操控板(106)的上端,所述移动机构(4)包括移动底座(401)、安装螺孔一(402)、安装槽(403)、移动电机(404)、移动传动轴(405)、移动轮(406)和移动履带(407),所述移动底座(401)固定安装在配重台(101)的下端。
2.根据权利要求1所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述传讯机构(2)包括安装端(201)、连接固定端(202)、电动推杆一(203)、电推杆一(204)和信号传讯端(205),所述安装端(201)固定安装在配重台(101)的上端,所述连接固定端(202)固定安装在安装端(201)的上端,所述电动推杆一(203)固定安装在连接固定端(202)的上端。
3.根据权利要求2所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述电推杆一(204)固定安装在电动推杆一(203)的上端,所述信号传讯端(205)固定安装在电推杆一(204)的上端。
4.根据权利要求3所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述叉车机构(3)包括安装连接柱(301)、连接支撑柱(302)、旋转丝杆(303)、叉车头(304)和校准装置(305),所述安装连接柱(301)固定安装在配重台(101)的左端,所述连接支撑柱(302)固定安装在安装连接柱(301)的上端,所述旋转丝杆(303)固定安装在连接支撑柱(302)的左端。
5.根据权利要求4所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述叉车头(304)固定安装在连接支撑柱(302)的左端,所述校准装置(305)固定安装在叉车头(304)的左端。
6.根据权利要求5所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述安装螺孔一(402)固定设置在移动底座(401)的上端,所述安装槽(403)固定设置在移动底座(401)的上端。
7.根据权利要求6所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述移动电机(404)固定安装在移动底座(401)的下端,所述移动传动轴(405)固定安装在移动电机(404)的前端。
8.根据权利要求7所述的一种堆叠动作自动对准的无人叉车,其特征在于:所述移动轮(406)固定安装在移动传动轴(405)的前端,所述移动履带(407)固定安装在移动轮(406)的前端。
技术总结
本技术涉及堆叠动作自动对准的无人叉车技术领域,且公开了一种堆叠动作自动对准的无人叉车,包括主体机构、传讯机构、叉车机构和移动机构,所述传讯机构位于主体机构的上端,所述叉车机构位于主体机构的左端,所述移动机构位于主体机构的下端,所述主体机构包括配重台、显示平台、显示屏幕、摄像头、发声板、操控板、操控按钮,所述显示平台固定安装在配重台的上端。该堆叠动作自动对准的无人叉车,通过对于主体机构和传讯机构的改进和安装,使得该堆叠动作自动对准的无人叉车的操控能力和传讯能力得以改进,在使用的过程中,可以便捷地有效地进行操控该堆叠动作自动对准的无人叉车,提高了该堆叠动作自动对准的无人叉车的工作效果。
技术研发人员:翟兴,周小龙,库韶坤
受保护的技术使用者:深圳市天兴诚科技有限公司
技术研发日:20220928
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!