一种烟草行业备件自动配送系统的制作方法
1.本实用新型属于烟草物流设备技术领域,具体为一种烟草行业备件自动配送系统。
背景技术:
2.当前烟厂备件领用一般采用人工领料的方式,当设备出现故障时,在mes系统中提交领用申请后,查找备件和货位,然后维修人员从生产车间步行至备件库,用小拖车或者人力从从备件库运送到生产现场,耗用时间较长且职工劳动强度增加,导致备件更换前准备时间延长,客观上影响了设备“净效率”提升。进入十四五时期,烟草行业物流提出打造“全面感知、数字驱动、智能管理、智慧决策”的行业智慧物流体系,发挥智慧物流建设对行业现代物流发展的促进作用。为了减轻职工劳动强度,响应国家局智慧物流建设指导意见,促进行业整体物流运行提质、增效、降本,助力行业高质量发展,需要发明一种烟草行业备件自动配送系统。
技术实现要素:
3.针对现有技术存在的上述问题,本实用新型发明提供一种烟草行业备件自动配送系统,采用mes系统与出入库调度系统 wcs自动对接,当设备出现故障后通过系统提交领料申请,系统自动下发备货指令并查找下发备件至取货站台,并根据备件重量选择igv小车或无人机配送。
4.为实现上述目的,本实用新型采用如下技术方案:一种烟草行业备件自动配送系统,包括mes系统、备件出入库调度系统 wcs、运输系统、配送系统,所述mes系统和备件出入库调度系统 wcs信息交互,备件出入库调度系统 wcs查询货位信息传递至运输系统,经过协作运输至配送系统,所述的配送系统设置有igv输送小车,所述的igv输送小车包括igv输送小车本体、运输框、视觉传感器,igv输送小车本体上部连接设置有运输框,运输框上设置延伸台安装有视觉传感器。
5.进一步地,所述的配送系统包括取货站台,igv输送小车,无人机。
6.进一步地,所述运输系统包括出入库提升机,多层穿梭车。
7.进一步地,所述出入库提升机采用入库提升机和出库提升机两套系统,与入库输送机站台和出库输送机站台分别对接;所述多层穿梭车采用并发模式,每层货架采用一台穿梭车进行出入库。
8.本实用新型的有益效果:
9.本实用新型自动配送系统采用以出入库提升机和多层穿梭车为主的运输系统进行备品备件的出入库运输操作,提高了备件出入库的柔性化和可靠性,配送系统结合使用igv输送小车和无人机实现点对点配送,大幅度提升了配送效率,减轻了工人劳动强度,可实现自动下单和自动配送,实现智能化备件配送。
附图说明
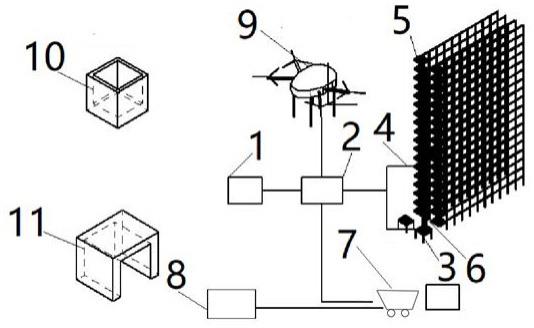
10.图1为本实用新型结构示意图;
11.图2为igv输送小车结构示意图;
12.图3为提升机结构示意图;
13.图1中,1-mes(manufacturing execution system)系统、2-备件出入库调度系统 wcs、3-出入库提升机、4-多层穿梭车、5-货架输送机(单向)、6-一层取货站台、7-igv(intelligent guided vehicle)智慧型导引运输车、7-1-igv输送小车本体、7-2-运输框、7-3-视觉传感器、8-wifi、9-无人机、10-无人机收货箱、11-igv收货点站台。
具体实施方式
14.为了使本实用新型的目的、技术方案和有益效果更加清楚,下面将结合附图,对本实用新型的优选实施例进行详细的说明,以方便技术人员理解。
15.如1图所示,所述的备件自动配送系统包括mes系统1,出入库调度系统 wcs2,运输系统,配送系统。所述mes系统1和出入库调度系统 wcs2信息交互,当设备出现故障或预防性维修需要更换备件时,维修人员在mes系统1里查询备件型号,根据备件型号和对应的货位号将信息通过接口传送给备件出入库调度系统 wcs 2,出入库调度系统 wcs2查询货位信息传递至运输系统,所述运输系统包括出入库提升机3,多层穿梭车4,wcs 2依据货位信息将任务分配给相应层货架上的多层穿梭车4,当备件类别较多时,相应层货架上的穿梭车可以并发工作,提升作业效率;穿梭车4取到备件后,输送至各层货架输送机(单向)5,备件到达后,备件出入库调度系统 wcs 2将任务传递至出入库提升机3,出入库提升机3收到任务后,将备件传送至一层取货站台6,所述出入库提升机3采用入库提升机和出库提升机两套系统,与入库输送机站台和出库输送机站台分别对接.根据入库时采集到的备件重量,出入库调度系统 wcs 2进行任务分配。配送系统根据备件重量选择配送方式,当重量大于5kg时,任务传送给igv输送小车7,当重量小于等于5kg时,任务传送给无人机9。
16.所述igv输送小车7包括igv输送小车本体7-1、运输框7-2、视觉传感器7-3、igv输送小车本体7-1上部连接设置有运输框7-2,避免备件体积较大时运输过程中颠簸造成备件遗失,运输框7-2上设置延伸台安装有视觉传感器7-3,同时为防止视觉传感器7-3被遮挡,运输框7-2为倾斜状,设置延伸台一侧框架高于另一侧。igv输送小车7导航采用轮廓、标识等视觉导航系统,并可以根据现场实际情况,实时更新地图信息,提升导引运输车的柔性、安全性和可靠性。igv输送小车7运输过程中利用视觉传感器7-3在360度范围内每隔0.5度发送一个激光脉冲,根据接收到的四周轮廓、标识返回脉冲时间长短计算距离,结合ndt算法提供的栅格化地图对车辆进行高精度定位,视觉传感器7-3通过读取它前面的三个栅格以及它后面的三个栅格并结合ndt栅格地图实现定位。ndt栅格地图通过协方差矩阵进行构建,ndt栅格是视觉传感器范围内物理对象的表示,栅格定义为协方差的平方根。当生成栅格地图时,通过计算给定栅格内读数的标准偏差,当小于3个传感器读数的栅格方块将显示为空,作为协方差不能在较少的点上计算。当igv输送小车7接到任务后,利用wifi 8和出入库调度系统 wcs 2进行信息交互,根据igv调度系统设定的起始地址和目标地址,利用视觉传感器进行避障,并根据现场路线实际情况,智能调整路线,直至运送至igv收货点站台11。当无人机9接到任务后,根据无人机9调度系统设定的起始地址和目标地址,并按照预定的
空中航线,按照固定的路线,将备件投递至无人机收货箱10,无人机9调度系统将投递结果反馈给出入库调度系统 wcs 2,当配送完备件后,无人机9自动返回充电站台充电。
17.本实用新型的工作过程:各个生产车间设置有固定的无人机收货箱10和igv收货点站台11,当维修人员需要更换备件时,从mes系统1发起,通过接口服务将货位信息传递给备件出入库调度系统 wcs 2,备件出入库调度系统 wcs 2将任务传递给相应层上的多层穿梭车4,多层穿梭车4取货后运输至各层货架输送机(单向)5,备件出入库调度系统 wcs 2检测到备件到位后,将任务传递至出入库提升机3,直至到达一层取货站台6,最后依据系统记录的备件重量,分配给igv输送小车7或无人机9,igv输送小车7完成任务后,igv输送小车7或无人机9自动返回取货点,完成整个任务的配送。
18.本实用新型自动配送系统采用以出入库提升机和多层穿梭车为主的运输系统进行备品备件的出入库运输操作,提高了备件出入库的柔性化和可靠性,配送系统结合使用igv输送小车和无人机实现点对点配送,大幅度提升了配送效率,减轻了工人劳动强度,可实现自动下单和自动配送,实现智能化备件配送。
19.最后说明的是,以上优选实施例仅用以说明本实用新型的技术方案而非限制,尽管通过上述优选实施例已经对本实用新型进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本实用新型权利要求书所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1