机器人下瓶装置的制作方法
1.本实用新型属于玻瓶下瓶装置技术领域,具体涉及机器人下瓶装置。
背景技术:
2.目前玻璃瓶下瓶设备所用的基本是6轴及垳架整体抓放,整体抓放只能针对相同的规格的瓶型;在玻璃瓶的实际生产中,经常会有混产的情况,即多种规格的玻璃瓶一起生产,在此情况下,现有的采用整体抓放的设备则无法兼容混产的不同瓶型,无法实现混产;并且热端退火炉中瓶子会出现炸裂的情况,抓放机构不能抓取该类炸裂瓶子,但此类设备末端配备有的推料机构,没有抓取的炸裂瓶子会在此处堆积,导致设备卡料。
技术实现要素:
3.本实用新型的目的是提供机器人下瓶装置,用以解决现有技术中玻璃瓶下瓶设备整体抓放只能针对相同的规格的瓶型,无法实现混产以及炸裂瓶子会导致设备卡料的问题。
4.为了实现上述目的,本实用新型采用以下技术方案:
5.一种机器人下瓶装置,包括用于传送待抓取的玻璃瓶的传送带平台,传送带平台末端设置有用于传送抓取后的玻璃瓶的传送带流水线,传送带平台的上方设置有机械手安装平台,所述机械手安装平台上方并排设置有多组用于对传送带平台上的瓶体进行识别定位并对瓶体进行逐一抓取的视觉机械手模组;所述传送带平台与传送带流水线之间设置有废瓶传送带,所述废瓶传送带位于传送带平台末端的下方,使得不能被抓取的废瓶或玻璃碎片随着传送带平台的移动掉落在废瓶传送带上被传送走。
6.根据上述技术,通过并排设置有多组用于对传送带平台上的瓶体进行识别定位并对瓶体进行逐一抓取的视觉机械手模组,视觉用于拍摄瓶口,以便根据瓶口瓶型判断瓶型种类,这样可以自动引导机械手切换抓取高度,从而实现兼容混产产品;对于炸裂产品,视觉拍摄瓶口后成像是不完整瓶口,系统会判断出该产品存在缺陷,不会引导机械手抓取,该产品通过废瓶传送带流入到废品箱中,保证设备不卡料;由此,解决现有技术中玻璃瓶下瓶设备整体抓放只能针对相同的规格的瓶型,无法实现混产以及炸裂瓶子会导致设备卡料的问题。
7.在一种可能的设计中,所述视觉机械手模组安装平台与传送带平台相互独立设置,所述机械手安装平台包括垂直于地面的支撑柱,所述支撑柱位于传送带平台两侧,支撑柱上方设置承载平台,且承载平台位于传送带平台上方,待抓取的玻璃瓶从承载平台下方通过。通过视觉机械手模组安装平台与传送带平台相互独立设置,方便对现有的生产平台进行改造,提高实用性。
8.在一种可能的设计中,所述视觉机械手模组包括摄像头和机械手;所述支撑柱上方设置有箱体,箱体底部镂空设置,所述箱体内部设置有直线轨道模组,所述直线轨道模组下方安装所述摄像头,以便直线轨道模组控制摄像头做直线来回运动,所述直线轨道模组
的运动方向与传送带平台的运动方向垂直;所述摄像头的视觉方向朝下,使得摄像头拍摄到传送带平台上的玻璃瓶;所述承载平台位于箱体侧边,所述机械手安装在承载平台上。通过使用箱体专门设置摄像头,避免杂光影响摄像头拍摄效果,提高识别精度;用于拍摄精度高,摄像头是逐一拍摄,因此,通过设计直线轨道模组控制摄像头做直线来回运动,直线轨道模组的运动方向与传送带平台的运动方向垂直;所述摄像头的视觉方向朝下,使得摄像头拍摄到传送带平台上的玻璃瓶,
9.在一种可能的设计中,所述直线轨道模组包括两根滑轨,且滑轨的轴线与传送带平台的运动方向垂直,两根滑轨平行设置且处于同一平面,所述摄像头的上方设置有安装板,安装板上方的两侧都设置有与所述滑轨配合的滑套,所述安装板上方的中部连接有连接杆,连接杆同时连接多个摄像头对应的安装板;安装板上方设置有传动带组件,传动带组件包括传动带,所述连接杆连接有传动带,传动带通过伺服电机驱动;传动带运动通过带动连接杆,连接杆带动多个摄像头同步运动。
10.在一种可能的设计中,所述摄像头周围设置有环形补光灯。
11.在一种可能的设计中,所述机械手安装平台包括4根支撑柱,传送带平台的两侧各两根支撑柱。
12.在一种可能的设计中,所述机械手的抓取范围相邻,多个所述机械手的抓取范围覆盖传送带平台末端的所有玻璃瓶。
13.在一种可能的设计中,所述机械手为四轴机械手。
14.在一种可能的设计中,所述机械手有2至5个。
15.在一种可能的设计中,所述废瓶传送带两侧设置有滑槽。
16.有益效果:通过使用视觉引导4轴机械手抓取形式,视觉用于拍摄瓶口,根据瓶口瓶型判断瓶型种类,这样可以自动引导机械手切换抓取高度,从而实现兼容混产产品;对于炸裂产品,相机拍摄瓶口后成像是不完整瓶口,系统会判断出该产品存在缺陷,不会引导机械手抓取,该产品通过输送线流入到废品箱中,保证设备不卡料。
附图说明
17.图1为实施例中提供的机器人下瓶装置的俯视结构示意图;
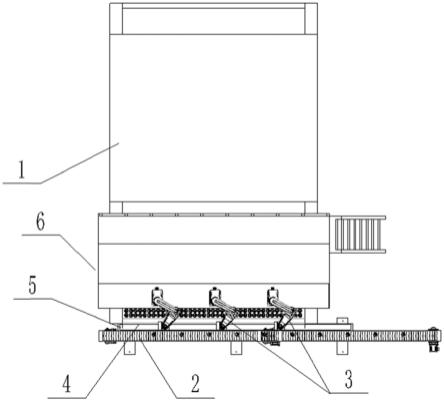
18.图2为实施例中提供的机器人下瓶装置的局部结构示意图;
19.图3为实施例中提供的机器人下瓶装置的内部结构示意图。
具体实施方式
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将结合附图和实施例或现有技术的描述对本实用新型作简单地介绍,显而易见地,下面关于附图结构的描述仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在此需要说明的是,对于这些实施例方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。
21.实施例:
22.如图1所示,本实施例提供了一种机器人下瓶装置,包括用于传送待抓取的玻璃瓶16的传送带平台1,传送带平台末端设置有用于传送抓取后的玻璃瓶的传送带流水线2,传
送带平台的上方设置有机械手安装平台6,所述机械手安装平台上方并排设置有多组用于对传送带平台上的瓶体进行识别定位并对瓶体进行逐一抓取的视觉机械手模组;所述传送带平台与传送带流水线之间设置有废瓶传送带5,所述废瓶传送带位于传送带平台末端的下方,使得不能被抓取的废瓶或玻璃碎片随着传送带平台的移动掉落在废瓶传送带上被传送走。具体实施时,废瓶传送带可以将废料传送至专门收集箱中以便回收处理。具体实施时,所述箱体旁边设置梯子以及过道,方便检修。
23.在一种可能实施方式中,所述视觉机械手模组安装平台与传送带平台相互独立设置,所述机械手安装平台包括垂直于地面的支撑柱8,所述支撑柱位于传送带平台两侧,支撑柱上方设置承载平台14,且承载平台位于传送带平台上方,待抓取的玻璃瓶从承载平台下方通过。
24.在一种可能实施方式中,如图2所示,所述视觉机械手模组包括摄像头7和机械手3;所述支撑柱上方设置有箱体9,具体实施时,箱体内部设置有箱体框架,箱体框架底部固定在支撑柱上;箱体底部镂空设置,所述箱体内部设置有直线轨道模组,所述直线轨道模组下方安装所述摄像头,以便直线轨道模组控制摄像头做直线来回运动,所述直线轨道模组的运动方向与传送带平台的运动方向垂直;所述摄像头的视觉方向朝下,使得摄像头拍摄到传送带平台上的玻璃瓶;所述承载平台位于箱体侧边,所述机械手安装在承载平台上。
25.在一种可能实施方式中,所述直线轨道模组包括两根滑轨10,且滑轨的轴线与传送带平台的运动方向垂直,两根滑轨平行设置且处于同一平面,所述摄像头的上方设置有安装板11,安装板上方的两侧都设置有与所述滑轨配合的滑套17,所述安装板上方的中部连接有连接杆12,连接杆同时连接多个摄像头对应的安装板;安装板上方设置有传动带组件,如图3所示,传动带组件包括传动带18,所述连接杆连接有传动带,传动带通过伺服电机驱动;传动带运动通过带动连接杆,连接杆带动多个摄像头同步运动。具体实施,如图3所示,传动带组件绕设在两个轴承上,轴承位于传动带两端,轴承安装在轴承安装座上,轴承安装座位位于连接杆12上方,轴承安装座下方连接有多个支架,支架连接在箱体框架上。传动带再绕颈伺服电机转轴,使用伺服电机进行进行控制。
26.具体实施时,所述摄像头设置有补光灯,具体的,所述摄像头周围设置环形补光灯13。
27.具体实施时,所述机械手安装平台包括4根支撑柱,传送带平台的两侧各两根支撑柱。
28.具体实施时,所述机械手的抓取范围相邻,多个所述机械手的抓取范围覆盖传送带平台末端的所有玻璃瓶。
29.具体的,所述机械手为四轴机械手。
30.在一种可能实施方式中,所述视觉机械手模组有2至5组。具体的,根据传送带平台的宽度以及视觉机械手模组的抓取宽度以及所需求的抓取速度来设定视觉机械手模组的组数。
31.在一种可能实施方式中,所述废瓶传送带两侧设置有滑槽4。通过设置滑槽减少碰撞。
32.具体实施时,所述传送带流水线靠传送平台的一侧设置有多个与机械手相对应的清洁擦板,在机械手抓取的过程中,机械手抓取玻璃瓶在清洁擦板上进行触碰通过清洁擦
板清洁玻璃瓶底。
33.综上所述,通过并排设置有多组用于对传送带平台上的瓶体进行识别定位并对瓶体进行逐一抓取的视觉机械手模组,视觉用于拍摄瓶口,以便根据瓶口瓶型判断瓶型种类,这样可以自动引导机械手切换抓取高度,从而实现兼容混产产品;对于炸裂产品,视觉拍摄瓶口后成像是不完整瓶口,系统会判断出该产品存在缺陷,不会引导机械手抓取,该产品通过废瓶传送带流入到废品箱中,保证设备不卡料;由此,解决现有技术中玻璃瓶下瓶设备整体抓放只能针对相同的规格的瓶型,无法实现混产以及炸裂瓶子会导致设备卡料的问题。
34.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1