立体仓储的桁架机器人的制作方法
1.本实用新型涉及桁架机器人,特别是立体仓储的桁架机器人。
背景技术:
2.为了节省货物存储的占地空间,现有的货物均放置的托盘上,随后通过托盘存放在立体的货架上,这样一来在一定的空间内能够提存放更多的货物;
3.货物存放在立体库内时,货物的存取便成为了难题,常规的方案是通过叉车行驶到该列货架前,通过卡爪的升降实现物品的存取,这样存取效率不高;
4.综上,如何实现了货物的自动化存取成为了本领域研究人员急需解决的问题。
技术实现要素:
5.本实用新型要解决的技术问题是:如何实现了货物的自动化存取;
6.为解决上述技术问题,本实用新型采取的技术方案为:
7.本实用新型是立体仓储的桁架机器人,包括:主框架,其水平设置在立体库的顶部;第一框架,其水平滑动设置在所述主框架底部,其通过第一驱动模组驱动,沿x轴方向进行直线运动;第二框架,其设置在所述第一框架底部,其通过第二驱动模组驱动,沿y轴进行直线运动;安装平台,其滑动设置在所述第二框架内,其通过第三驱动模组驱动,相对于所述第二框架进行z轴方向的直线运动;伸缩货叉,其安装在所述安装平台上,其适于存取所述立体库内的货物;
8.在本方案中,主框架通过立柱设置在立体库顶部,第二框架沿第一框架做y轴的直线运动,带动伸缩货叉位于某一排货架处;通过第一框架沿主框架进行x轴方向的运动,带动伸缩货叉位于某一列货架处;通过安装平台沿第二框架的z轴运动,带动伸缩货叉位于某一呈货架处,通过伸缩货叉的运动能够将货物存取在安装平台上,这样一来,通过本装置能够实现伸缩货叉的三轴直线运动;本装置能够实现货物的存取以及货物的存放位置的更换,提高了货物的存取效率;此外伸缩货叉为现有技术,在本方案中不具体阐述。
9.为了说明第一框架的具体结构,本实用新型采用第一框架包括:平行于y轴的两第一梁体,连接两所述第一梁体端部的第一边车架;第一滑轮,其设置在所述第一边车架上,并与组成所述主框架的工字梁滚动连接;
10.两第一梁体、两第一边车架构成第一框架,第一车边架上设置有第一滑轮,通过第一滑轮将第一框架吊设在主框架的下方,通过第一滑轮实现第一框架相对于主框架的直线移动;主框架采用工字梁,这样一来工字梁为第一滑轮提供了滚动的平面。
11.为了具体说明第一滑轮是如何设置在第一车边架上,本实用新型采用每一所述第一边车架的端部均设置有一对所述第一滑轮,一对所述第一滑轮分别位于工字梁的外侧、内侧;
12.第一框架具有两个第一边车架,每一第一边车架的两端设置有一对第一滑轮,这样一来,第一框架上总计设置有8个第一滑轮,相对设置的第一滑轮能够限制第一框架只沿
主框体进行直线运动,使得第一框架能够更加平稳的沿主框体进行直线运动。
13.为了说明驱动模组的具体结构,本实用新型采用第一驱动模组包括:第一齿条,其沿x轴方向设置在所述主框架底部;第一电机,其固定在所述第一框架上,其输出端安装有与所述第一齿条啮合的第一齿轮;
14.第一电机带动第一齿轮转动,从而带动第一框架沿主框架进行x轴方向的直线运动,第一电机可设置两个,分别位于第一框架两侧,这样为第一框架的平移能够提高更大的动力。
15.为了说明第二框架的具体结构,本年实用新型采用第二框架包括第二平面;所述第二平面顶部两侧均设置有第二边车架;第二滑轮,其设置在所述第二边车架上,并与所述第一梁体滚动连接;所述第二平面底部两侧均设置有供所述安装平台升降第二升降架;
16.第二平面顶部设置有两第二边车架,第二边车架上设置的第二滑轮与第一框架配合实现了第二框架沿x轴进行运动,第二平面底部设置有两第二升降降,第二升降架供安装平台的升降。
17.为了说明第二滑轮具体的安装位置,本实用新型采用每一所述第二边车架的端部均设置有一对所述第二滑轮,一对所述第二滑轮分别位于所述第一梁体的外侧、内侧。
18.第二滑轮与第一滑轮安装布置的位置一致,第二边车架的端部均设置有一对第二滑轮,第二滑轮与第一梁体的内外侧连接,第一梁体为工字梁,为第二滑轮的吊设连接提供了平台,同样通过这样布置第二滑轮能够实现第二框架只沿第一框架进行直线运动,使得第二框体能够更加平稳的沿第一框架进行直线运动。
19.为了说明第二驱动模组的具体结构,本实用新型采用第二驱动模组包括:第二齿条,其沿y轴方向设置在所述第一梁体底部;第二电机,其固定在所述第二平面一侧,其输出端设置有与所述第二齿条啮合的第二齿轮;
20.第二电机带动第二齿轮转动,从而带动第二框架沿第一框架进行y轴方向的直线运动,第二电机可设置两个,分别位于第二框架两侧,这样为第二框架的平移能够提高更大的动力。
21.为了说明安装平台如何与第二框架连接,本实用新型采用第二升降架内侧设置有滑轨;所述安装平台两侧均设置有与所述滑轨配合的滑块。
22.为了说明第三驱动模组的具体结构,本实用新型采用第三驱动模组包括:第三齿条,其沿z轴方向竖直设置在所述第二升降架上;第三电机,其通过安装架固定在所述安装平台侧边,其输出端设置有与所述第三齿条啮合的第三齿轮;
23.第三电机带动第三齿轮转动,从而带动安装平台沿第二升降架进行z轴方向的直线运动,第三电机可设置多个,分别位于安装平台两侧,这样为安装平台的升降能够提高更大的动力。
24.本实用新型的有益效果:本实用新型是立体仓储的桁架机器人,主框架通过立柱设置在立体库顶部,第二框架沿第一框架做y轴的直线运动,带动伸缩货叉位于某一排货架处;通过第一框架沿主框架进行x轴方向的运动,带动伸缩货叉位于某一列货架处;通过安装平台沿第二框架的z轴运动,带动伸缩货叉位于某一呈货架处,通过伸缩货叉的运动能够将货物存取在安装平台上,这样一来,通过本装置能够实现伸缩货叉的三轴直线运动;本装置能够实现货物的存取以及货物的存放位置的更换,提高了货物的存取效率。
附图说明
25.下面结合附图和实施例对本实用新型进一步说明。
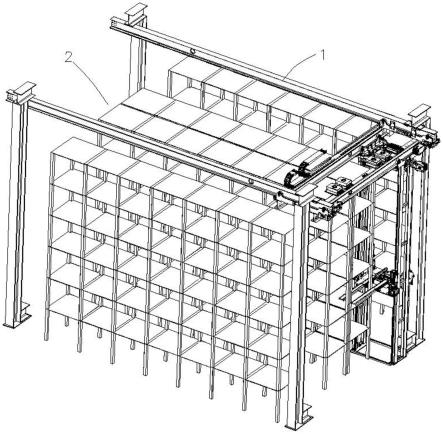
26.图1是本实用新型的结构示意图;
27.图2是本实用新型省略立体库的结构示意图;
28.图3是本实用新型第一框架的结构示意图;
29.图4是本实用新型第二框架、安装平台的结构示意图;
30.图中:1-主框架、2-立体库、3-第一框架、4-第二框架、5-安装平台、6-伸缩货叉、7-第一梁体、8-第一边车架、9-第一滑轮、10-第一电机、11-第一齿条、12-第一齿轮、13-第二平面、14-第二边车架、15-第二滑轮、16-第二升降架、17-第二电机、18-滑轨、19-第三电机、20-第三齿条。
具体实施方式
31.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
32.如图1-2所示,本实用新型是立体仓储的桁架机器人,包括:主框架1,其水平设置在立体库2的顶部;第一框架3,其水平滑动设置在所述主框架1底部,其通过第一驱动模组驱动,沿x轴方向进行直线运动;第二框架4,其设置在所述第一框架3底部,其通过第二驱动模组驱动,沿y轴进行直线运动;安装平台5,其滑动设置在所述第二框架4内,其通过第三驱动模组驱动,相对于所述第二框架4进行z轴方向的直线运动;伸缩货叉6,其安装在所述安装平台5上,其适于存取所述立体库2内的货物;
33.在本方案中,主框架通过立柱设置在立体库顶部,第二框架沿第一框架做y轴的直线运动,带动伸缩货叉位于某一排货架处;通过第一框架沿主框架进行x轴方向的运动,带动伸缩货叉位于某一列货架处;通过安装平台沿第二框架的z轴运动,带动伸缩货叉位于某一呈货架处,通过伸缩货叉的运动能够将货物存取在安装平台上,这样一来,通过本装置能够实现伸缩货叉的三轴直线运动;本装置能够实现货物的存取以及货物的存放位置的更换,提高了货物的存取效率;此外伸缩货叉为现有技术,在本方案中不具体阐述。
34.如图3所示为了说明第一框架的具体结构,本实用新型采用第一框架3包括:平行于y轴的两第一梁体7,连接两所述第一梁体7端部的第一边车架8;第一滑轮9,其设置在所述第一边车架8上,并与组成所述主框架1的工字梁滚动连接;
35.两第一梁体、两第一边车架构成第一框架,第一车边架上设置有第一滑轮,通过第一滑轮将第一框架吊设在主框架的下方,通过第一滑轮实现第一框架相对于主框架的直线移动;主框架采用工字梁,这样一来工字梁为第一滑轮提供了滚动的平面。
36.如图3所示,为了具体说明第一滑轮是如何设置在第一车边架上,本实用新型采用每一所述第一边车架的端部均设置有一对所述第一滑轮,一对所述第一滑轮分别位于工字梁的外侧、内侧;
37.第一框架具有两个第一边车架,每一第一边车架的两端设置有一对第一滑轮,这样一来,第一框架上总计设置有8个第一滑轮,相对设置的第一滑轮能够限制第一框架只沿主框体进行直线运动,使得第一框架能够更加平稳的沿主框体进行直线运动。
38.如图3所示,为了说明第一驱动模组的具体结构,本实用新型采用第一驱动模组包
括:第一齿条11,其沿x轴方向设置在所述主框架1底部;第一电机10,其固定在所述第一框架3上,其输出端安装有与所述第一齿条11啮合的第一齿轮12;
39.第一电机带动第一齿轮转动,从而带动第一框架沿主框架进行x轴方向的直线运动,第一电机可设置两个,分别位于第一框架两侧,这样为第一框架的平移能够提高更大的动力。
40.如图4所示,为了说明第二框架的具体结构,本年实用新型采用第二框架4包括第二平面13;所述第二平面13顶部两侧均设置有第二边车架14;第二滑轮15,其设置在所述第二边车架14上,并与所述第一梁体7滚动连接;所述第二平面13底部两侧均设置有供所述安装平台5升降第二升降架16;
41.第二平面顶部设置有两第二边车架,第二边车架上设置的第二滑轮与第一框架配合实现了第二框架沿x轴进行运动,第二平面底部设置有两第二升降降,第二升降架供安装平台的升降。
42.如图4所示,为了说明第二滑轮具体的安装位置,本实用新型采用每一所述第二边车架14的端部均设置有一对所述第二滑轮15,一对所述第二滑轮15分别位于所述第一梁体7的外侧、内侧。
43.第二滑轮与第一滑轮安装布置的位置一致,第二边车架的端部均设置有一对第二滑轮,第二滑轮与第一梁体的内外侧连接,第一梁体为工字梁,为第二滑轮的吊设连接提供了平台,同样通过这样布置第二滑轮能够实现第二框架只沿第一框架进行直线运动,使得第二框体能够更加平稳的沿第一框架进行直线运动。
44.如图4所示,为了说明第二驱动模组的具体结构,本实用新型采用第二驱动模组包括:第二齿条,其沿y轴方向设置在所述第一梁体7底部;第二电机17,其固定在所述第二平面13一侧,其输出端设置有与所述第二齿条啮合的第二齿轮;
45.第二电机带动第二齿轮转动,从而带动第二框架沿第一框架进行y轴方向的直线运动,第二电机可设置两个,分别位于第二框架两侧,这样为第二框架的平移能够提高更大的动力。
46.如图4所示,为了说明安装平台如何与第二框架连接,本实用新型采用第二升降架16内侧设置有滑轨18;所述安装平台5两侧均设置有与所述滑轨18配合的滑块。
47.如图4所示,为了说明第三驱动模组的具体结构,本实用新型采用第三驱动模组包括:第三齿条20,其沿z轴方向竖直设置在所述第二升降架16上;第三电机19,其通过安装架固定在所述安装平台5侧边,其输出端设置有与所述第三齿条20啮合的第三齿轮;
48.第三电机带动第三齿轮转动,从而带动安装平台沿第二升降架进行z轴方向的直线运动,第三电机可设置多个,分别位于安装平台两侧,这样为安装平台的升降能够提高更大的动力。
49.本实用新型是立体仓储的桁架机器人,主框架通过立柱设置在立体库顶部,第二框架沿第一框架做y轴的直线运动,带动伸缩货叉位于某一排货架处;通过第一框架沿主框架进行x轴方向的运动,带动伸缩货叉位于某一列货架处;通过安装平台沿第二框架的z轴运动,带动伸缩货叉位于某一呈货架处,通过伸缩货叉的运动能够将货物存取在安装平台上,这样一来,通过本装置能够实现伸缩货叉的三轴直线运动;本装置能够实现货物的存取以及货物的存放位置的更换,提高了货物的存取效率。
50.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1