一种屏幕分拣机的自动摆盘总成的制作方法
1.本实用新型涉及屏幕生产技术领域,具体涉及一种屏幕分拣机的自动摆盘总成。
背景技术:
2.手机屏幕在生产时,需依照质量对手机屏幕进行分拣,将手机屏幕分成良品、重工品与 ng品,ng品直接收集报废,而良品与重工品需分别通过托盘收纳、存放,以便于后续的工艺处理,为了节省占地面积,托盘需要进行堆叠,同时为了避免屏幕的损伤,需在托盘的放置槽内放置隔板纸,随后将屏幕放置在隔板纸上,现都人工将托盘进行堆叠并放置至隔板纸,这种的方式效率降低,且人工成本高,因此为了提高其效率,需一种可自动对托盘进行输送、堆叠的摆放装置,弥补现市场上的空缺。
3.鉴于上述缺陷,本实用新型创作者经过长时间的研究和实践终于获得了本实用新型。
技术实现要素:
4.本实用新型的目的在于提供一种可自动对托盘进行输送、堆叠的摆放装置。
5.本实用新型是通过以下技术方案解决上述技术问题的,本实用新型包括托盘单元、隔板纸仓、良品单元、重工单元、两个两轴取料机构、托盘真空吸具与隔板纸真空吸具,所述托盘单元、隔板纸仓、良品单元与重工单元并排纵向设置于设备安装框架,两个所述两轴取料机构通过安装横架安装于设备安装框架,所述托盘真空吸具与隔板纸真空吸具分别安装于两个两轴取料机构的执行端。
6.优选的,还包括托盘读码机构,所述托盘读码机构设置于托盘单元一侧,所述托盘读码机构实现对托盘单元内的托盘进行读码识别。
7.优选的,所述托盘读码机构包括竖向杆、第一连接夹具、横向杆、第二连接夹具、读码器,所述竖向杆安装于设备安装框架,所述横向杆通过第一连接夹具安装于竖向杆,所述读码器通过第二连接夹具固定于横向杆。
8.优选的,所述两轴取料机构包括齿条、两个滑轨、移动台、移动电机、第二竖向电动滑台、支架,所述齿条与两个滑轨均沿安装横架的长度方向设置,所述移动台通过滑块滑动安装于两个滑轨,所述移动电机安装于移动台上,所述移动电机的输出端固定有齿轮,所述齿轮与齿条啮合连接,所述第二竖向电动滑台通过连接座安装于移动台,所述支架固定于第二竖向电动滑台的移动端,且所述托盘真空吸具与隔板纸真空吸具分别安装于两个两轴取料机构中支架的下端。
9.优选的,所述托盘单元包括仓底流水线、输送流水线、四个隔离板、多个定位件与托盘仓,所述仓底流水线与输送流水线首尾对接,四个所述隔离板分别位于仓底流水线与输送流水线的两侧,所述仓底流水线与其两侧的隔离板之间形成托盘仓,多个所述定位件均设置于隔板的上侧,所述良品单元、重工单元与托盘单元的结构相同。
10.与现有技术比较本实用新型的有益效果在于:
11.1、利用对应的两轴取料机构可将托盘仓内的托盘放置良品仓与重工仓,再利用对应的两轴取料机构将隔板纸仓内的隔板纸放入至托盘中,即可利用取料机器人将屏幕放置在隔板纸上,最后通过输送流水线将满载屏幕的托盘排出,进而达到自动堆叠、输送托盘的效果,提高了效率。
12.2、对每一个屏幕的信息码进行识别,得出该屏幕的质量状态,随后利用取料机器人将屏幕以良品、ng品、重工品分别放置良品仓、ng流水线、重工仓,进而达到自动分拣屏幕的效果,降低了人工成本,提高了生产效率。
附图说明
13.图1为屏幕分拣机第一视角的结构示意图;
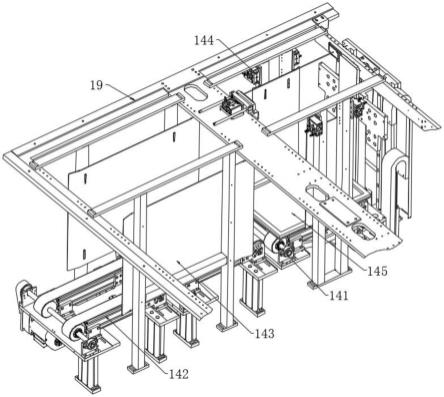
14.图2为屏幕分拣机第二视角的结构示意图;
15.图3为屏幕分拣机的俯视结构示意图;
16.图4为图1中屏幕上料机构的结构示意图;
17.图5为图1中取料机器人的结构示意图;
18.图6为图1中产品读码机构的结构示意图;
19.图7为图2中a处放大结构示意图;
20.图8为图1中两轴取料机构的结构示意图;
21.图9为图1中托盘单元的结构示意图。
22.图中数字表示:
23.1-来料流水线;2-抽查流水线;3-ng流水线;4-屏幕上料机构;41-支撑座;42-横向电动滑台;43-纵向电动滑台;44-第一竖向电动滑台;45-旋转器;46-第一抓料真空吸具;5-取料机器人;51-第二抓料真空吸具;6-物料转载机构;61-推料电动滑台;62-物料载台;7-产品读码机构;8-翻转机构;81-翻转电机;82-翻转杆;83-翻转真空吸具;9-两轴取料机构; 91-齿条;92-滑轨;93-移动台;94-移动电机;95-第二竖向电动滑台;96-支架;10-托盘真空吸具;11-隔板纸真空吸具;13-托盘读码机构;131-竖向杆;132-第一连接夹具;133-横向杆;134-第二连接夹具;135-读码器;14-托盘单元;141-仓底流水线;142-输送流水线;143-隔离板;144-定位件;145-托盘仓;15-良品单元;16-重工单元;17-隔板纸仓;19-设备安装框架; 20-安装横架。
具体实施方式
24.以下结合附图,对本发明上述的和另外的技术特征和优点作更详细的说明。
25.实施例一
26.参照图1、图2、图4与图5,本发明中自动分拣机包括设备安装框架19、分拣总成、自动摆盘总成,分拣总成与自动摆盘总成均设置于设备安装框架19上,分拣总成实现将屏幕不同质量的为准分类、拿取,自动摆盘总成实现对屏幕有序分类摆放与收纳;分拣总成包括来料流水线1、ng流水线3、屏幕上料机构4、取料机器人5、ccd相机、产品读码机构7与物料转载机构6,设备安装框架19为装置的整体支撑架,各个部位均聚集设置在设备安装框架19上,来料流水线1安装于设备安装框架19的一侧,来料流水线1将上级设备处理好的屏幕向本装置传输,屏幕上料机构4与取料机器人5分别设置于来料流水线1两侧的设备安装框架
19上,屏幕上料机构4实现将屏幕放置物料转载机构6上,ccd相机安装于安装框架上,随后产品读码机构7对放置在物料转载机构6上的屏幕进行读码获取信息,信息码为二位码或条形码,获取信息中具有屏幕对应的编号、检测信息等,进而可判断每一个屏幕是否合格,将其分为良品、ng品、重工品;取料机器人5的执行末端安装有第二抓料真空吸具51,取料机器人5利用第二抓料真空吸具51对屏幕进行抓取,依照产品读码机构7读取的屏幕质量信息,利用取料机器人5将屏幕进行分拣,同时在来料流水线1一侧设置有一条抽查流水线2,在运行的过程时,通过取料机器人5随机抽取屏幕放置在抽查流水线2,抽查流水线2将屏幕传输出来,工作人员即可对其进行人工检查,物料转载机构6位于来料流水线1与重工单元16之间的设备安装框架19上。
27.参照图4,屏幕上料机构4为具有四轴向驱动,其包括支撑座41、横向电动滑台42、纵向电动滑台43、第一竖向电动滑台44、旋转器45、第一抓料真空吸具46,支撑座41固定于设备安装框架19,横向电动滑台42安装于支撑座41,纵向电动滑台43安装于横向电动滑台 42的移动端,第一竖向电动滑台44安装于横向电动滑台42的移动端,旋转器45安装于第一竖向电动滑台44的移动端,第一抓料真空吸具46安装于旋转器45的旋转端,通过横向电动滑台42、纵向电动滑台43、第一竖向电动滑台44对第一抓料真空吸具46进行三维移动,并通过旋转器45对第一抓料真空吸具46进行水平方向的旋转,进而可对来料流水线1上任意摆放的屏幕进行摆正,并摆放至物料转载机构6上。
28.参照图7,物料转载机构6包括推料电动滑台61与物料载台62,推料电动滑台61安装于设备安装框架19,物料载台62安装于推料电动滑台61的移动端,推料电动滑台61可将物料载台62移动,物料转载机构6一侧设置有翻转机构8,翻转机8包括翻转电机81、翻转杆82与翻转真空吸具83,翻转电机81通过支座固定于设备安装框架19,翻转杆82固定于翻转电机81的输出端,翻转真空83吸具安装于翻转杆82,屏幕在制作时,无需翻面的,通过的屏幕上料机构4直接放置在物料载台62上,经过产品读码机构7识别之后,即可使用取料机器人5将其抓取,而有的屏幕需要将其翻面的,需要运行电动滑台61,使得装载有屏幕的物料载台62移动至对应的位置,运行翻转电机81带动翻转真空吸具83翻转,翻转真空吸具83会将屏幕固定吸住,再翻转至原先角度,即完成屏幕的翻面,利用取料机器人5进行抓取。
29.本实施例中,来料流水线1将上级设备处理好的屏幕向本装置传输,ccd相机大视野拍照,得出屏幕摆放的角度以及位置,利用屏幕上料机构4将屏幕拿取放置在物料载台62上,产品读码机构7会对屏幕上的信息码进行读取,获取该屏幕的质量信息,区分良品、ng品、重工品,利用取料机器人5将ng品放置ng流水线3、良品与重工品放置至自动摆盘总成中,即达到利用自动化的方式对不同质量的屏幕区分开来,同时可利用上料机器人可随机将良品拿取到抽查流水线2上进行抽查。
30.实施例二
31.参照图2、图3与图9,本发明中自动摆盘总成包括托盘单元14、隔板纸仓17、良品单元15、重工单元16、托盘真空吸具10、隔板纸真空吸具11与两个两轴取料机构9,托盘单元14包括仓底流水线141、输送流水线142、四个隔离板143、多个定位件144与托盘仓145,仓底流水线141与输送流水线142首尾对接,四个隔离板143分别位于仓底流水线141与输送流水线142的两侧,仓底流水线141与其两侧的隔离板143之间形成托盘仓145,多个定位件144均设置于隔板143的上侧,定位件144包括气缸以及固定于气缸伸缩端的定位板,良品单元15、重
工单元16与托盘单元14的结构相同,良品单元15中有与托盘仓145对应的良品仓,重工单元16中有与托盘仓145对应的重工仓,托盘仓145、隔板纸仓17、良品仓、重工仓并排设置,托盘仓145与隔板纸仓17分别设置于良品仓与重工仓的两侧,设备安装安装架上固定有安装横架20,两个两轴取料机构9均设置于安装横架20上,托盘真空吸具10 与隔板纸真空吸具11分别安装于两个两轴取料机构9的执行端,托盘仓145内放置空托盘,隔板纸仓17内放置隔板纸,位于托盘单元14一侧的两轴取料机构9可将托盘仓内145的空托盘放置良品仓与重工仓内,位于隔板纸仓17一侧的两轴取料机构9可将隔板纸仓17内的隔板纸放置良品仓与重工仓中的空托盘内,随后取料机器人5即可将屏幕放置在隔板纸上。
32.参照图3与图6,还包括托盘读码机构13,包括竖向杆131、第一连接夹具132、横向杆 133、第二连接夹具134、读码器135,竖向杆131安装于设备安装框架19,横向杆133通过第一连接夹具132安装于竖向杆131,通过第一连接夹具132可对竖向杆131的高度进行调节,可读码器135通过第二连接夹具134固定于横向杆133,通过第二连接夹具134可对读码器135的横向位置以及安装倾斜的角度进行调节,进而满足读码器135的读码范围自由调整,产品读码机构7的结构与托盘读码机构1的结构相同,托盘读码机构13对每一个托盘进行读码获取其信息,并将其信息传输至后台系统,完成屏幕质量的记载,以便于后续工艺中对各个托盘中屏幕的状态进行识别。
33.参照图8,两轴取料机构9包括齿条91、两个滑轨92、移动台93、移动电机94、第二竖向电动滑台95、支架96,齿条91与两个滑轨92均沿安装横架20的长度方向设置,两个滑轨92位于齿条91的两侧,两个两轴取料机构9中的齿条91与滑轨92可共同使用,移动台93通过滑块滑动安装于两个滑轨92,移动电机94安装于移动台93上,移动电机94的输出端固定有齿轮,齿轮与齿条91啮合连接,运行移动电机94带动齿轮转动,齿轮与齿条91 的配合,即可使移动台93进行移动,第二竖向电动滑台95通过连接座安装于移动台93,支架96固定于第二竖向电动滑台95的移动端,且托盘真空吸具10与隔板纸真空吸具11分别安装于两个两轴取料机构9中支架96的下端,移动台93在移动时,可带动托盘真空吸具10 或隔板纸真空吸具11纵向移动,第二竖向电动滑台95可带动托盘真空吸具10或隔板纸真空吸具11竖向移动,即可顺利的对托盘与隔板纸进行拿取。
34.本实施例中,利用对应的两轴取料机构9将托盘仓145内的托盘拿取放置在良品仓与重工仓内,再利用对应的两轴取料机构9将隔板纸仓17内的隔板纸放入至托盘中,隔板纸真空吸具11每次吸附隔板纸的个数与隔板纸可放置屏幕的个数相同,即可利用取料机器人5将屏幕放置在隔板纸上,同时良品仓与重工仓内的托盘可进行堆叠,待托盘使用完时,利用托盘单元14中的输送流水线142与仓底流水线141将多个堆叠的托盘输送至托盘仓145内,良品仓与重工仓内的托盘堆叠一定的高度时,利用对应的仓底流水线141与输送流水线142将装载屏幕的托盘排出。
35.以上所述仅为本发明的较佳实施例,对本发明而言仅仅是说明性的,而非限制性的。本专业技术人员理解,在本发明权利要求所限定的精神和范围内可对其进行许多改变,修改,甚至等效,但都将落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1