一种自动分拣机构的制作方法
1.本实用新型涉及分拣出库技术领域,尤其涉及一种自动分拣机构。
背景技术:
2.电子烟出库需根据订单进行分拣装箱,以往的的电子烟分拣装箱采用人工操作,工作量大,工作效率低。公告号为cn203620965u的专利文献公开了一种件烟分拣装置,包括依序沿传送带输送件烟方向设置的条形码识别装置和至少一个的分拣执行机构,条形码识别装置进行件烟上条形码信息的读取,并根据读取的条形码信息进行识别以确认相应的分拣执行机构进行件烟分拣动作。电子烟存在较多种类,每个订单需要不同种类的组合,现有的分拣装置无法对多种类组合的电子烟出库分拣过程进行中转存放。
技术实现要素:
3.本实用新型所要解决的技术问题在于如何满足多种类电子烟出库分拣过程的中转存放。
4.本实用新型是通过以下技术手段实现解决上述技术问题的:一种自动分拣机构,包括上料暂存机构、存放柜、下料暂存机构和取料机构,所述上料暂存机构、存放柜和下料暂存机构依次设置,所述取料机构的运动路线经过所述上料暂存机构、存放柜和下料暂存机构;所述存放柜包括多个沿x向排成一行的纵列,每个纵列包括多个沿z向间隔排列的存料槽。
5.优选地,所述取料机构包括上框架、上平移臂、上取料机械手、下框架、下平移臂和下取料机械手;多个上平移臂分别设置在所述上框架上,各上平移臂沿x向排成一行且均能够沿x向运动,各上平移臂上分别设置有能够沿z向运动的上取料机械手;多个下平移臂分别设置在所述下框架上,各下平移臂沿x向排成一行且均能够沿x向运动,各下平移臂上分别设置有能够沿z向运动的下取料机械手;
6.所述上框架位于所述存放柜的上方,所述下框架位于所述存放柜的下方;所述上平移臂与所述下平移臂沿y向错开设置,所述上取料机械手能够从所述上框架与所述存放柜之间通过,所述下取料机械手能够从所述下框架与所述存放柜之间通过。
7.优选地,所述存料槽具有多种宽度,同一个纵列中的各存料槽宽度相同。
8.优选地,所述上框架上固定连接有沿x向延伸的上平移齿条,所述下框架上固定连接有沿x向延伸的下平移齿条;所述上平移臂包括上平移框架、上平移电机和上平移齿轮,所述上平移电机固定连接在所述上平移框架上,所述上平移齿轮固定连接在所述上平移电机的输出轴,所述上平移齿轮与所述上平移齿条啮合;所述下平移臂包括下平移框架、下平移电机和下平移齿轮,所述下平移电机固定连接在所述下平移框架上,所述下平移齿轮固定连接在所述下平移电机的输出轴,所述下平移齿轮与所述下平移齿条啮合。
9.优选地,所述上平移臂上固定连接有沿z向延伸的上升降齿条,所述下平移臂上固定连接有沿z向延伸的下升降齿条;所述上取料机械手包括上取料框架、上升降电机和上升
降齿轮,所述上升降电机固定连接在所述上取料框架上,所述上升降齿轮固定连接在所述上升降电机的输出轴,所述上升降齿轮与所述上升降齿条啮合;所述下取料机械手包括下取料框架、下升降电机和下升降齿轮,所述下升降电机固定连接在所述下取料框架上,所述下升降齿轮固定连接在所述下升降电机的输出轴,所述下升降齿轮与所述下升降齿条啮合。
10.优选地,所述上取料机械手还包括第二丝杆机构和上夹取叉,所述第二丝杆机构设置在所述上取料框架上且运动方向沿y向,所述上夹取叉固定连接在所述第二丝杆机构的运动端;所述下取料机械手还包括第四丝杆机构和下夹取叉,所述第四丝杆机构设置在所述下取料框架上且运动方向沿y向,所述下夹取叉固定连接在所述第四丝杆机构的运动端。
11.优选地,所述上夹取叉包括上固定叉、第三丝杆机构和上移动叉,所述第三丝杆机构设置在所述上固定叉上且运动方向沿z向,所述上移动叉固定连接在所述第三丝杆机构的运动端;所述下夹取叉包括下固定叉、第五丝杆机构和下移动叉,所述第五丝杆机构设置在所述下固定叉上且运动方向沿z向,所述下移动叉固定连接在所述第五丝杆机构的运动端。
12.优选地,所述上料暂存机构包括支撑架和暂存槽;多个暂存槽排成上下两行,每行的各暂存槽沿x向间隔排列;所述下料暂存机构与所述上料暂存机构结构相同。
13.优选地,所述暂存槽包括固定边框、第一丝杆机构和移动边框,所述固定边框固定连接在所述支撑架上,所述第一丝杆机构设置在所述固定边框上且运动方向沿x向,所述移动边框固定连接在所述第一丝杆机构的运动端。
14.本实用新型的优点在于:存放柜可按列存放多种类的电子烟,在取料机构的配合下,可满足多种类电子烟出库分拣过程的中转存放。
附图说明
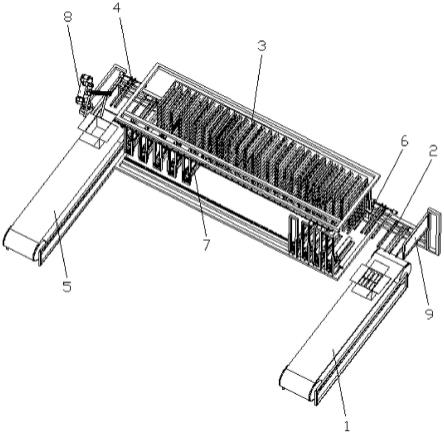
15.图1为本实用新型实施例电子烟自动分拣装箱系统的结构示意图。
16.图2为本实用新型实施例上料暂存机构的结构示意图。
17.图3为本实用新型实施例存放柜的结构示意图。
18.图4为本实用新型实施例取料机构的结构示意图。
19.图5为本实用新型实施例上平移臂的结构示意图。
20.图6为本实用新型实施例上取料机械手的结构示意图。
21.图7为本实用新型实施例上夹取叉的结构示意图。
22.图8为本实用新型实施例下平移臂的结构示意图。
23.图9为本实用新型实施例下取料机械手的结构示意图。
24.图10为本实用新型实施例下夹取叉的结构示意图。
25.图11为本实用新型实施例下料机械手的结构示意图。
具体实施方式
26.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施
例是本实用新型一部分实施例,而不是全部实施例。基于本实用新型实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
27.如图1所示,本实用新型实施例公开一种自动分拣机构,电子烟自动分拣装箱系统包括上料输送带1、下料输送带5、扫码器6、下料机械手8、显示屏9、控制单元(图未示)和所述自动分拣机构,所述自动分拣机构包括上料暂存机构2、存放柜3、下料暂存机构4和取料机构7。
28.上料输送带1、上料暂存机构2、存放柜3、下料暂存机构4和下料输送带5依次设置,扫码器6设置在上料暂存机构2的上方,取料机构4的运动路线经过上料暂存机构2、存放柜3和下料暂存机构4,下料机械手8的运动路线经过下料暂存机构4和下料输送带5,上料输送带1、上料暂存机构2、下料暂存机构4、下料输送带5、扫码器6、取料机构7、下料机械手8和显示屏9分别连接所述控制单元。
29.如图2所示,上料暂存机构2包括支撑架21、暂存槽22;多个暂存槽22排成上下两行,每行的各暂存槽22沿x向间隔排列。
30.暂存槽22包括固定边框221、第一丝杆机构222、移动边框223;固定边框221固定连接在支撑架21上;第一丝杆机构222设置在固定边框221上且运动方向沿x向,第一丝杆机构222包括第一丝杆、第一移动块和第一电机,所述第一丝杆的一端与固定边框221转动连接,所述第一移动块通过螺纹连接在所述第一丝杆上,所述第一电机的输出轴与所述第一丝杆的一端固定连接;移动边框223固定连接在第一丝杆机构的运动端即所述第一移动块上。
31.下料暂存机构4与上料暂存机构2结构相同。
32.如图3所示,存放柜3包括多个沿x向排成一行的纵列,每个纵列包括多个沿z向间隔的存料槽31;存料槽31具有多种宽度,同一个纵列中的各存料槽31宽度相同。
33.如图4所示,取料机构7包括上框架71、上平移臂72、上取料机械手73、下框架74、下平移臂75、下取料机械手76、上平移齿条77、下平移齿条78。
34.多个上平移臂72分别设置在上框架71上,各上平移臂72沿x向排成一行且均能够沿x向运动,各上平移臂72上分别设置有能够沿z向运动的上取料机械手73;多个下平移臂75分别设置在下框架74上,各下平移臂75沿x向排成一行且均能够沿x向运动,各下平移臂75上分别设置有能够沿z向运动的下取料机械手76。
35.上框架71位于存放柜3的上方,下框架74位于存放柜3的下方;上平移臂72与下平移臂75沿y向错开设置,上取料机械手73能够从上框架71与存放柜3之间通过,下取料机械手76能够从下框架74与存放柜3之间通过,避免了运动到交错位置时相互干涉。
36.上框架71上固定连接有沿x向延伸的上平移齿条77,下框架74上固定连接有沿x向延伸的下平移齿条78。
37.如图5所示,上平移臂72包括上平移框架721、上平移电机722、上平移齿轮723、上升降齿条724;上平移电机722固定连接在上平移框架721上,上平移齿轮723固定连接在上平移电机722的输出轴,上平移齿轮723与上平移齿条77啮合;上平移框架721上固定连接有沿z向延伸的上升降齿条724。
38.如图6所示,上取料机械手73包括上取料框架731、上升降电机732、上升降齿轮733、第二丝杆机构734、上夹取叉735;上升降电机732固定连接在上取料框架731上,上升降
齿轮733固定连接在上升降电机732的输出轴,上升降齿轮733与上升降齿条724啮合;第二丝杆机构734设置在上取料框架731上且运动方向沿y向,第二丝杆机构734包括第二丝杆、第二移动块和第二电机,所述第二丝杆的两端分别与上取料框架731转动连接,所述第二移动块通过螺纹连接在所述第二丝杆上,所述第二电机的输出轴与所述第二丝杆的一端固定连接;上夹取叉735固定连接在第二丝杆机构734的运动端即所述第二移动块上。
39.如图7所示,上夹取叉735包括上固定叉7351、第三丝杆机构7352、上移动叉7353;第三丝杆机构7352设置在上固定叉7351上且运动方向沿z向,第三丝杆机构7352包括第三丝杆、第三移动块和第三电机,所述第三丝杆的两端分别与上固定叉7351转动连接,所述第三移动块通过螺纹连接在所述第三丝杆上,所述第三电机的输出轴与所述第三丝杆的一端固定连接;上移动叉7353固定连接在第三丝杆机构7352的运动端即所述第三移动块上。
40.如图8所示,下平移臂75包括下平移框架751、下平移电机752、下平移齿轮753、下升降齿条754;下平移电机752固定连接在下平移框架751上,下平移齿轮753固定连接在下平移电机752的输出轴,下平移齿轮753与所述下平移齿条78啮合;下平移框架751上固定连接有沿z向延伸的下升降齿条754。
41.如图9所示,下取料机械手76包括下取料框架761、下升降电机762、下升降齿轮763、第四丝杆机构764、下夹取叉765;下升降电机762固定连接在下取料框架761上,下升降齿轮763固定连接在下升降电机762的输出轴,下升降齿轮763与下升降齿条754啮合;第四丝杆机构764设置在下取料框架761上且运动方向沿y向,第四丝杆机构764包括第四丝杆、第四移动块和第四电机,所述第四丝杆的两端分别与下取料框架761转动连接,所述第四移动块通过螺纹连接在所述第四丝杆上,所述第四电机的输出轴与所述第四丝杆的一端固定连接;下夹取叉765固定连接在第四丝杆机构764的运动端即所述第四移动块上。
42.如图10所示,下夹取叉765包括下固定叉7651、第五丝杆机构7652、下移动叉7653;第五丝杆机构7652设置在下固定叉7651上且运动方向沿z向,第五丝杆机构7652包括第五丝杆、第五移动块和第五电机,所述第五丝杆的两端分别与下固定叉7651转动连接,所述第五移动块通过螺纹连接在所述第五丝杆上,所述第五电机的输出轴与所述第五丝杆的一端固定连接;下移动叉7653固定连接在第五丝杆机构7652的运动端即所述第五移动块上。
43.如图11所示,下料机械手8包括多关节机械臂81、固定爪82、第六丝杆机构83、移动爪84;固定爪82固定连接在多关节机械臂81的运动端;第六丝杆机构83设置在固定爪82上,第六丝杆机构83包括第六丝杆、第六移动块和第六电机,所述第六丝杆的两端分别与固定爪82转动连接,所述第六移动块通过螺纹连接在所述第六丝杆上,所述第六电机的输出轴与所述第六丝杆的一端固定连接;移动爪84固定连接在第六丝杆机构83的运动端即所述第六移动块上。
44.所述电子烟自动分拣装箱系统的工作过程包括以下步骤:
45.步骤a,人工将上料输送带1送来的电子烟通过扫码器6扫描条码后放置在上料暂存机构2的暂存槽22中,扫码器6将电子烟的条码发送给控制单元,控制单元控制取料机构7将电子烟取至存放柜3中存放并记录条码对应的电子烟存放的x向和z向位置;
46.步骤b,订单系统下料后,控制单元控制取料机构7将所需种类的电子烟取至下料暂存机构4的暂存槽中,上下两排取料机械手同时工作,效率较高;
47.步骤c,人工将包装箱放置在下料输送带5上,下料机械手8将下料暂存机构4中的
电子烟取出并放置在包装箱中,装完箱后通过下料输送带5进行运输;
48.步骤d,显示屏9显示存放柜3中每个种类电子烟的存料数量,以便于操作人员及时补充所缺种类的电子烟。
49.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1