一种自动化装卸车系统的制作方法
本技术属于带托盘货箱的装卸设备,具体涉及一种自动化装卸车系统。
背景技术:
1、目前,在生产链环节,为便于装卸作业,众多的成品、半成品、原辅材料,均被放置于托盘之上,再经由车辆跨区域转运。在带托盘货箱的装卸车作业环节,也大多使用燃油或者电动叉车。
2、上述叉车目前普遍均需要由专业司机驾驶,正常情况下均可以安全顺利的完成装卸货作业,且具有任何设备无法比拟的柔性,但频繁的单一类型作业,难免会造成人员疲惫,一方面诱发自动装卸过程中出现货物冲撞、跌落的安全风险时间,另一方面也会诱发腰椎间盘突出等职业病。因此,如何设计一种自动化装卸车系统,以实现带托盘的货箱的自动化装卸车,释放人力资源,避免上述问题出现,成为本领域技术人员急需解决的技术问题。
技术实现思路
1、本实用新型的目的是提供一种自动化装卸车系统,以解决现有技术中的上述技术问题。
2、为实现上述目的,本实用新型提供了如下技术方案:
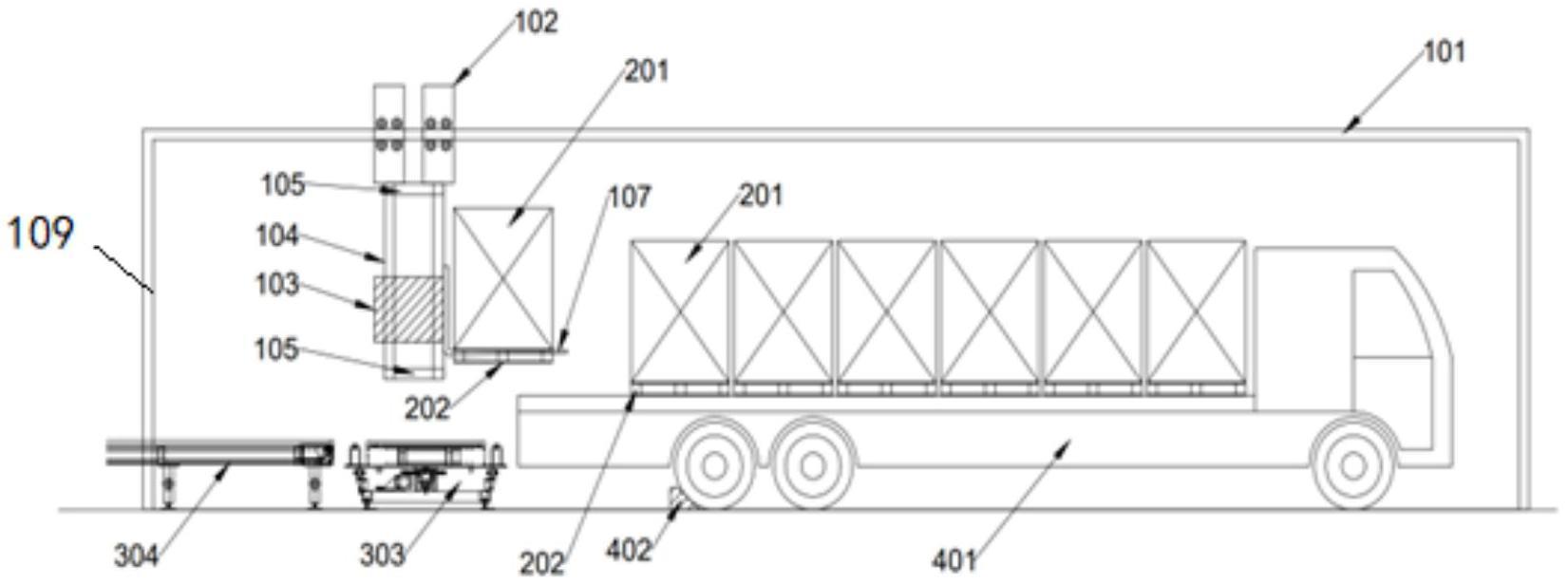
3、一种自动化装卸车系统,其包括门架、行走机构、调整机构、输送机、移载机、控制器,所述行走机构滑动设置在所述门架的水平横梁上,所述调整机构滑动设置在所述行走机构的下部且能够前后移动;所述移载机设置在所述水平横梁的下方的地面上,所述输送机设置在所述移载机的左侧,所述移载机的右侧用于设置货车,所述调整机构上靠近所述货车的一侧设置有用于与托盘上的叉孔相配合的货叉,所述货叉能够在竖直方向上移动;所述调整机构用于将所述货车上待卸的带托盘的货箱移动到所述移载机上或将所述移载机上待装的带托盘的货箱移动到所述货车上,所述移载机用于放置所述输送机输送来的待装的带托盘的货箱或所述调整机构移动来的待卸的带托盘的货箱;所述调整机构上靠近所述货车的一侧的底部设置有用于对待装或待卸的带托盘的货箱的叉孔进行识别和定位的视觉检测定位组件,所述移载机的右侧的地面上设置有用于对所述货车的后轮进行阻挡的挡轮器;所述控制器用于对所述行走机构、所述调整机构和所述货叉的移动进行控制,所述输送机和所述移载机以及所述视觉检测定位组件分别与所述控制器电连接。
4、优选地,所述门架包括两个水平横梁、两个连接梁,两所述水平横梁的两端分别通过所述连接梁相连,两所述水平横梁与两所述连接梁共同构成矩形结构,两所述水平横梁与两所述连接梁的连接处均设置有竖直向下延伸的支撑梁。
5、优选地,所述行走机构包括两个连接杆、分别设置在两所述连接杆的两端的四个滑块、用于驱动所述滑块在所述水平横梁上滑动的第一驱动机构,所述连接杆与所述水平横梁相垂直,所述滑块与所述水平横梁滑动配合;各所述滑块的底面上均设置有竖直杆,位于所述门架同一侧的两所述竖直杆之间通过水平杆相连,位于所述门架不同侧的两所述竖直杆之间通过移动杆相连,所述移动杆与所述连接杆相平行;所述调整机构滑动设置在所述移动杆上,所述货叉竖直滑动设置在所述调整机构靠近所述货车的一侧;所述行走机构上设置有用于驱动所述调整机构在所述移动杆上前后移动的第二驱动机构,所述调整机构上设置有用于驱动所述货叉在所述调整机构上靠近所述货车的一侧竖直移动的第三驱动机构,所述第一驱动机构、所述第二驱动机构和所述第三驱动机构分别与所述控制器电连接。
6、优选地,位于所述门架同一侧的所述水平杆的个数为两个。
7、优选地,所述第一驱动机构、所述第二驱动机构和所述第三驱动机构上均设置有用于进行坐标定位的旋转编码器,所述旋转编码器与所述控制器电连接。
8、优选地,所述输送机和所述移载机的个数均为两个,两所述输送机与两所述移载机一一对应设置。
9、本实用新型的有益效果在于:
10、本实用新型的自动化装卸车系统,其在使用时,通过控制器对行走机构的移动进行控制,使得行走机构能够带动调整机构靠近或远离货车,即实现调整机构的货叉在左右方向上的位置调整;同时通过控制器对调整机构的前后移动进行控制,能够实现货叉在前后方向上的位置调整,利用控制器对货叉的竖直移动进行控制,能够实现货叉在上下方向上的位置调整,再利用与控制器电连接的视觉检测定位组件能够方便地实现货叉与叉孔的配合,从而能够利用货叉将带托盘的货箱从货车上移动到移载机上或将带托盘的货箱由移载机上移动到货车上,即实现了自动装卸车,有效地释放了人力资源。
技术特征:
1.一种自动化装卸车系统,其特征在于,其包括门架、行走机构、调整机构、输送机、移载机、控制器,所述行走机构滑动设置在所述门架的水平横梁上,所述调整机构滑动设置在所述行走机构的下部且能够前后移动;所述移载机设置在所述水平横梁的下方的地面上,所述输送机设置在所述移载机的左侧,所述移载机的右侧用于设置货车,所述调整机构上靠近所述货车的一侧设置有用于与托盘上的叉孔相配合的货叉,所述货叉能够在竖直方向上移动;所述调整机构用于将所述货车上待卸的带托盘的货箱移动到所述移载机上或将所述移载机上待装的带托盘的货箱移动到所述货车上,所述移载机用于放置所述输送机输送来的待装的带托盘的货箱或所述调整机构移动来的待卸的带托盘的货箱;所述调整机构上靠近所述货车的一侧的底部设置有用于对待装或待卸的带托盘的货箱的叉孔进行识别和定位的视觉检测定位组件,所述移载机的右侧的地面上设置有用于对所述货车的后轮进行阻挡的挡轮器;所述控制器用于对所述行走机构、所述调整机构和所述货叉的移动进行控制,所述输送机和所述移载机以及所述视觉检测定位组件分别与所述控制器电连接;
2.根据权利要求1所述的自动化装卸车系统,其特征在于,所述门架包括两个水平横梁、两个连接梁,两所述水平横梁的两端分别通过所述连接梁相连,两所述水平横梁与两所述连接梁共同构成矩形结构,两所述水平横梁与两所述连接梁的连接处均设置有竖直向下延伸的支撑梁。
3.根据权利要求1所述的自动化装卸车系统,其特征在于,所述第一驱动机构、所述第二驱动机构和所述第三驱动机构上均设置有用于进行坐标定位的旋转编码器,所述旋转编码器与所述控制器电连接。
4.根据权利要求1所述的自动化装卸车系统,其特征在于,所述输送机和所述移载机的个数均为两个,两所述输送机与两所述移载机一一对应设置。
技术总结
本技术提供了一种自动化装卸车系统,其包括门架、行走机构、调整机构、输送机、移载机、控制器,行走机构滑动设置在门架的水平横梁上;调整机构滑动设置在行走机构的下部且能够前后移动;移载机设置在水平横梁的下方的地面上,其左侧设置有输送机,其右侧设置有货车,调整机构上设有能够在竖直方向上移动的货叉;调整机构用于将货车上待卸的带托盘的货箱移动到移载机上或将移载机上待装的带托盘的货箱移动到货车上,调整机构上设有视觉检测定位组件,移载机的右侧地面上设有挡轮器;控制器控制行走机构、调整机构和货叉的移动,输送机、移载机和视觉检测定位组件分别与控制器电连接。本技术能够实现自动装卸车,有效地释放了人力资源。
技术研发人员:俎萌萌,肖辉,赵宏钧,赵丽娟,张超,王冬梅,桂鹏,安然,潘俊飞,裴勇
受保护的技术使用者:河南中烟工业有限责任公司
技术研发日:20221123
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!