一种码垛机器人的制作方法
本技术涉及一种码垛机器人。
背景技术:
1、码垛机器人,是机械与计算机程序有机结合的产物,为现代生产提供了更高的生产效率,码垛机器在码垛行业有着相当广泛的应用,码垛机器人大大节省了劳动力,节省空间,码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高。
2、现有用在对袋装的食品添加剂进行搬运的码垛机器人在夹持袋装食品添加剂时只能单纯的进行搬运,但是该码垛机器人在搬运物品的过程中没有对袋装食品添加剂进行顶紧,致使袋装食品添加剂在搬运的过程易因为抖动而摔落到地面上,造成袋装食品添加剂的损坏。
技术实现思路
1、针对上述问题,本实用新型提供了一种码垛机器人。
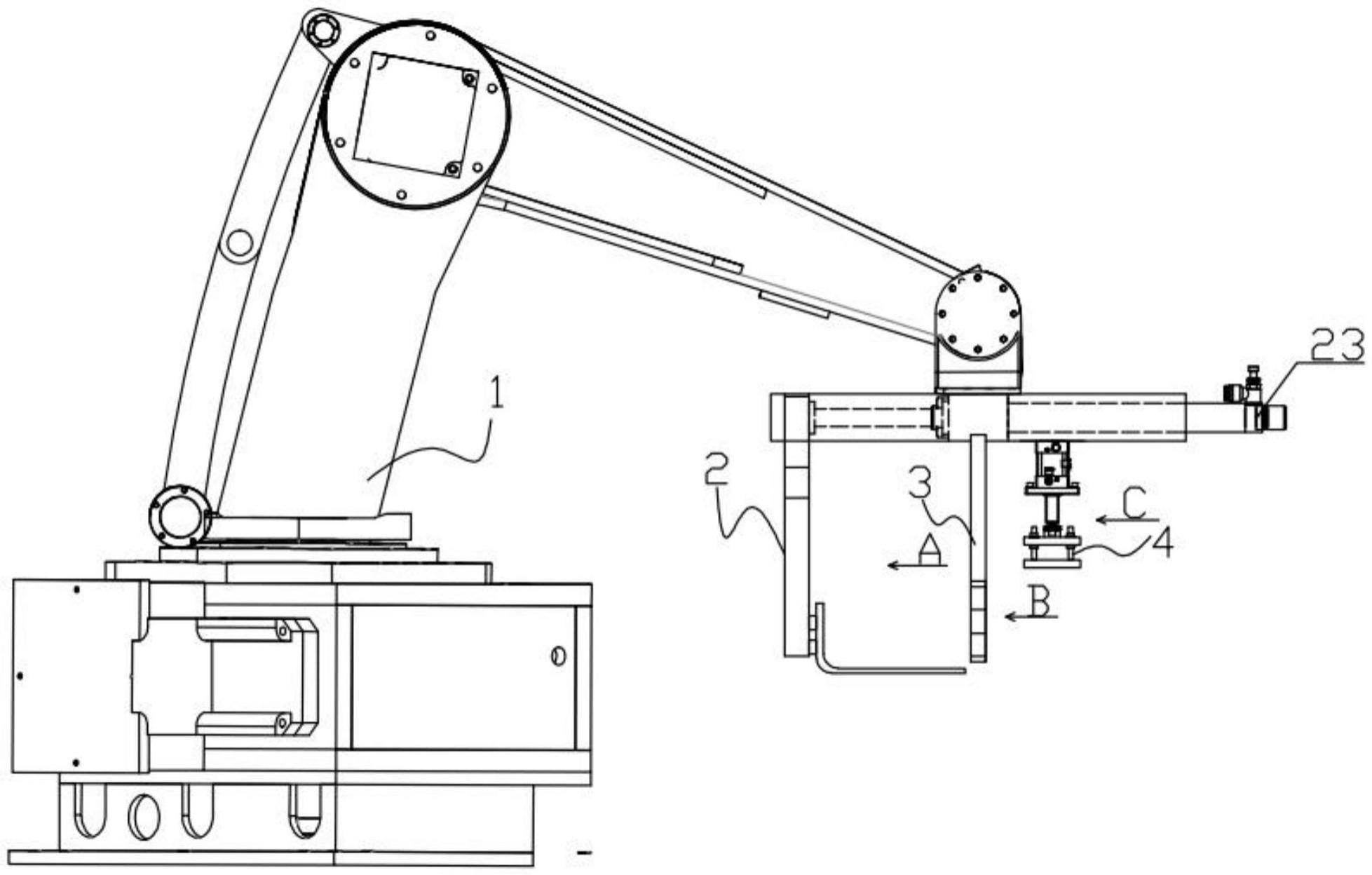
2、为解决上述技术问题,本实用新型所采用的技术方案是:一种码垛机器人,包括码垛机器人主体、设置在码垛机器人主体前端的搬运部装,所述码垛机器人主体上设置有驱动所述搬运部装水平移动的横向驱动部装,还包括设置在码垛机器人主体位于搬运部装前端的顶压部装,所述顶压部装包括纵向驱动部装、与纵向驱动部装连接的顶压件;纵向驱动部装运作,驱使顶压件能够向下运动,以使顶压件可将位于搬运部装上的物料进行顶紧。
3、进一步的,所述搬运部装包括与所述码垛机器人主体滑动连接的移动板、与所述移动板的底部固定连接的耙齿。
4、进一步的,所述横向驱动部装为驱动油缸,所述驱动油缸的活塞杆与移动板紧固连接;驱动油缸运作,以驱使移动板能够进行水平移动。
5、进一步的,所述纵向驱动部装为驱动气缸,所述驱动气缸的伸缩杆与顶压件紧固连接;驱动气缸运作,以驱使顶压件能够进行纵向移动。
6、进一步的,所述顶压件包括上顶压板、设置在上顶压板下方的下顶压板,所述上顶压板与下顶压板之间通过连接杆相连接,所述连接杆的一端与下顶压板相连接,该连接杆的另一端贯穿过上顶压板后并通过两锁紧螺母进行并紧,所述纵向驱动部装的伸缩杆与上顶压板固定连接。
7、进一步的,所述连接杆的底部与下顶压板螺纹连接。
8、进一步的,所述码垛机器人主体位于搬运部装与顶压部装之间还设置有挡料部装。
9、进一步的,所述挡料部装包括与码垛机器人主体固定连接的竖杆、设置在竖杆底部的挡料板,所述挡料板上开设有减重孔。
10、由上述对本实用新型结构的描述可知,和现有技术相比,本实用新型具有如下优点:
11、1、本实用新型提供的一种码垛机器人,通过在码垛机器人主体的前端设置有搬运部装、顶压部装和挡料部装,即搬运部装的耙齿能够将从喷码工序输送过来的袋装食品添加剂托夹起,然后顶压部装能够可将位于搬运部装耙齿上的物料进行顶紧,而后在码垛机器人主体的水平转动下,能够将袋装食品添加剂转运到下一工序上,最后在挡料部装的挡料作用下,搬运部装能够轻松将位于其上的袋装食品添加剂卸出,大大提高了工作效率的同时在顶压部装的作用下,能够避免袋装食品添加剂在搬运的过程易因为抖动而摔落到地面上,造成袋装食品添加剂的损坏的问题发生。
12、2、本实用新型提供的一种码垛机器人,通过采用由纵向驱动部装和顶压件等相结合构成的顶压部装,即当需要对袋装食品添加剂进行顶紧时,驱动气缸的伸缩杆伸出,带动了与其连接的上顶压板向下运动,在连接杆的作用下,下顶压板也能够向下运动,进而使得下压板能够较牢固将袋装食品添加剂顶紧在耙齿上。
13、3、本实用新型提供的一种码垛机器人,通过采用由上顶压板、下顶压板和连接杆等相结合构成的顶压件,即通过调节上顶压板与下顶压板之间的距离,就可以使得该顶压部装能够对多个不同厚度的袋装食品添加剂进行顶紧,实用性强。
技术特征:
1.一种码垛机器人,包括码垛机器人主体、设置在码垛机器人主体前端的搬运部装,所述码垛机器人主体上设置有驱动所述搬运部装水平移动的横向驱动部装,其特征在于:还包括设置在码垛机器人主体位于搬运部装前端的顶压部装,所述顶压部装包括纵向驱动部装、与纵向驱动部装连接的顶压件;纵向驱动部装运作,驱使顶压件能够向下运动,以使顶压件可将位于搬运部装上的物料进行顶紧。
2.根据权利要求1所述的一种码垛机器人,其特征在于:所述搬运部装包括与所述码垛机器人主体滑动连接的移动板、与所述移动板的底部固定连接的耙齿。
3.根据权利要求2所述的一种码垛机器人,其特征在于:所述横向驱动部装为驱动油缸,所述驱动油缸的活塞杆与移动板紧固连接;驱动油缸运作,以驱使移动板能够进行水平移动。
4.根据权利要求1所述的一种码垛机器人,其特征在于:所述纵向驱动部装为驱动气缸,所述驱动气缸的伸缩杆与顶压件紧固连接;驱动气缸运作,以驱使顶压件能够进行纵向移动。
5.根据权利要求1所述的一种码垛机器人,其特征在于:所述顶压件包括上顶压板、设置在上顶压板下方的下顶压板,所述上顶压板与下顶压板之间通过连接杆相连接,所述连接杆的一端与下顶压板相连接,该连接杆的另一端贯穿过上顶压板后并通过两锁紧螺母进行并紧,所述纵向驱动部装的伸缩杆与上顶压板固定连接。
6.根据权利要求5所述的一种码垛机器人,其特征在于:所述连接杆的底部与下顶压板螺纹连接。
7.根据权利要求1所述的一种码垛机器人,其特征在于:所述码垛机器人主体位于搬运部装与顶压部装之间还设置有挡料部装。
8.根据权利要求7所述的一种码垛机器人,其特征在于:所述挡料部装包括与码垛机器人主体固定连接的竖杆、设置在竖杆底部的挡料板,所述挡料板上开设有减重孔。
技术总结
本技术公开了一种码垛机器人,包括码垛机器人主体、设置在码垛机器人主体前端的搬运部装,码垛机器人主体上设置有驱动所述搬运部装水平移动的横向驱动部装,还包括设置在码垛机器人主体位于搬运部装前端的顶压部装,顶压部装包括纵向驱动部装、与纵向驱动部装连接的顶压件;纵向驱动部装运作,驱使顶压件能够向下运动,以使顶压件可将位于搬运部装上的物料进行顶紧。采用上述技术方案后,本技术提供的码垛机器人能够避免袋装食品添加剂在搬运的过程易因为抖动而摔落到地面上,造成袋装食品添加剂的损坏的问题发生。
技术研发人员:张玲玲
受保护的技术使用者:泉州亚太高邦食品配料有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!