一种砖块抓取装置的制作方法
本技术涉及建筑材料加工设备,更具体涉及一种砖块抓取装置。
背景技术:
1、在建筑行业和智能制造的快速发展大环境下,越来越多的自动化设备被用于建筑原材料的生产过程当中,其中砖块作为建筑当中不可获缺的一部分,在整个项目实施当中,必须要保证砖块的一致性和耐压能力。目前行业当中,砖块的压力测试及尺寸测量仍大多数需要人工搬运拿取,非常麻烦,效率低,既费时费力又存在较大的安全隐患,故而推出机器人对砖块进行自动抓取转移,大大提升了工作效率,但在转运过程中要求抓取装置稳定,能够保证作业安全性。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种砖块抓取装置,结构稳定。运行平稳。
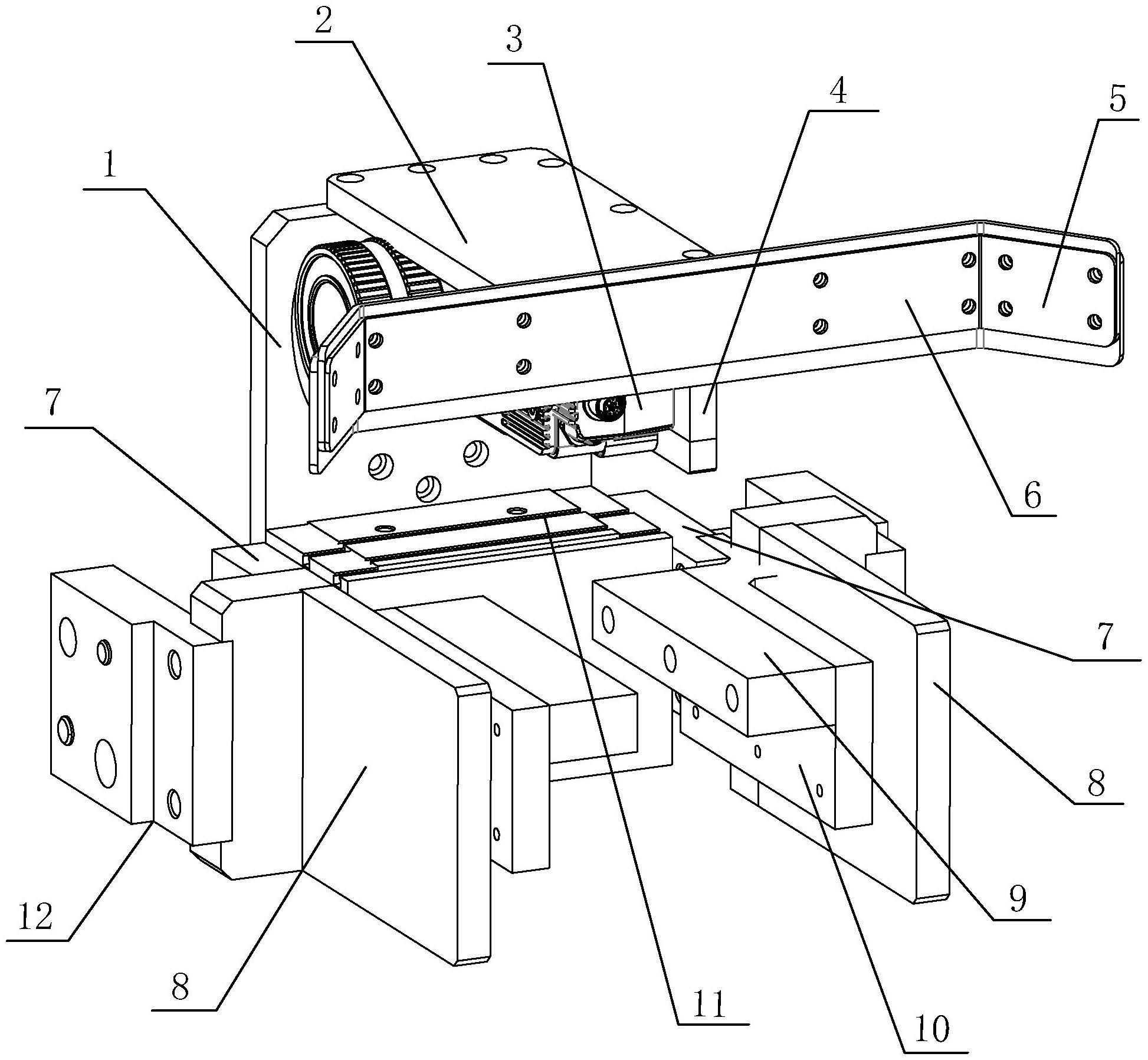
2、为实现上述目的,本实用新型提供了如下技术方案:一种砖块抓取装置,包括安装座,所述安装座的一侧设置有两个夹头,所述安装座上设置有控制两个夹头相对或者相背运动的驱动装置,所述驱动装置包括固定在所述安装座一侧的夹取气缸,所述夹取气缸采用平行双向双头气缸,所述夹头与所述夹取气缸的两侧伸缩端连接。
3、夹取气缸的两个伸缩头分别与两个夹头连接,相向运动时夹头夹紧,相背运动时夹头放开,从而实现对砖块的夹取。通过双头气缸控制夹取装置的夹头运动,实现对砖块的夹取及转运,运行平稳,控制精准。
4、进一步,所述夹取气缸的两侧伸缩端连接有固定板,所述夹头安装在所述固定板的内侧。夹取气缸的伸缩带动固定板移动,从而带动与之连接的两个夹头夹紧或者分开动作。通过将夹头安装在固定板上,方便拆卸维修及更换。
5、进一步,所述夹取气缸的两侧设置有导向板,所述导向板与所述夹取气缸的伸缩杆间隙配合,所述导向板与所述夹头连接。夹取气缸伸缩过程中导向板沿伸缩杆移动,从而控制夹头的移动行程,避免夹取过程中产生横向位移偏差。
6、进一步,所述夹取气缸上设置有与所述夹头配合的磁性开关,磁性开关用于检测显示夹头的打开状态,从而便于控制抓取动作。
7、进一步,所述夹头的内侧设置有与其呈l型连接的顶板,在夹取及转移过程中,将砖块固定在l型的夹槽中,对砖块左右两侧及顶部进行夹持,提高夹取及转移的稳定性。
8、进一步,所述安装座的一侧连接有相机安装板,所述相机安装板上安装有对砖块进行拍照的相机,对砖块进行拍照,识别砖块信息。
9、进一步,所述安装座的上端里侧连接有清理组件安装板,所述清理组件安装板的端部设置有对砖块进行推送的清理挡板,在砖块测试完成后,需要将其推送到后端进行输送,通过在安装座的上端设置的清理挡板对砖块进行推送。
10、进一步,所述清理挡板的两端开设有向外倾斜扩张的遮挡端,在推送砖块时将避免向两侧倾倒。
11、综上所述,本实用新型抓取装置通过安装座连接在机器人控制臂上,采用平行双向双头气缸实现夹头对砖块的夹取及转运。通过机器人抓取代替人工抓取,减轻工人工作压力,提高工作效率,完善作业安全。本实用新型抓取装置结构稳定、运行平稳且控制方便灵活。
技术特征:
1.一种砖块抓取装置,其特征在于:包括安装座,所述安装座的一侧设置有两个夹头,所述安装座上设置有控制两个夹头相对或者相背运动的驱动装置,所述驱动装置包括固定在所述安装座一侧的夹取气缸,所述夹取气缸采用平行双向双头气缸,所述夹头与所述夹取气缸的两侧伸缩端连接。
2.根据权利要求1所述的砖块抓取装置,其特征在于:所述夹取气缸的两侧伸缩端连接有固定板,所述夹头安装在所述固定板的内侧。
3.根据权利要求2所述的砖块抓取装置,其特征在于:所述夹取气缸的两侧设置有导向板,所述导向板与所述夹取气缸的伸缩杆间隙配合,所述导向板与所述夹头连接。
4.根据权利要求3所述的砖块抓取装置,其特征在于:所述夹取气缸上设置有与所述夹头配合的磁性开关。
5.根据权利要求1所述的砖块抓取装置,其特征在于:所述夹头的内侧设置有与其呈l型连接的顶板。
6.根据权利要求1所述的砖块抓取装置,其特征在于:所述安装座的一侧连接有相机安装板,所述相机安装板上安装有对砖块进行拍照的相机。
7.根据权利要求1所述的砖块抓取装置,其特征在于:所述安装座的上端里侧连接有清理组件安装板,所述清理组件安装板的端部设置有对砖块进行推送的清理挡板。
8.根据权利要求7所述的砖块抓取装置,其特征在于:所述清理挡板的两端开设有向外倾斜扩张的遮挡端。
技术总结
本技术公开了一种砖块抓取装置,包括安装座,所述安装座的一侧设置有两个夹头,所述安装座上设置有控制两个夹头相对或者相背运动的驱动装置,所述驱动装置包括固定在所述安装座一侧的夹取气缸,所述夹取气缸采用平行双向双头气缸,所述夹头与所述夹取气缸的两侧伸缩端连接。本技术抓取装置通过安装座连接在机器人控制臂上,采用平行双向双头气缸实现夹头对砖块的夹取及转运。通过机器人抓取代替人工抓取,减轻工人工作压力,提高工作效率,完善作业安全。本技术抓取装置结构稳定、运行平稳且控制方便灵活。
技术研发人员:陆丹华,阮方圆,唐永,徐家辉
受保护的技术使用者:哈工大机器人集团(杭州湾)国际创新研究院
技术研发日:20221213
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!