一种基于真空反吹的上下料真空机械手装置的制作方法
本技术属于真空工装治具,特别涉及一种基于真空反吹的上下料真空机械手装置。
背景技术:
1、由于真空抓取系统环保,不会污染环境,没有光、热,电磁等产生,不会损伤工件表面,越来越多的搬运领域采用真空抓取装置代替传统的机械式夹爪。通过真空装置产生真空,让真空机械手上的真空吸盘达到一定的真空度,吸附在钢板表面,产生负压力,抓取钢板。真空机械手配合起重装置,让钢板发生水平位移后,再把钢板放在工作台上。释放钢板时,打开真空吸放阀,让外面空气通过吸放阀进入真空系统,达到破坏真空的目的。
2、但是目前自动化搬运领域中使用的真空吸盘在工作过程中,由于空气通过吸放阀进入真空系统,需要的时间有点多,真空破坏速度慢,导致起重机构上行时,吸盘内还有一定的真空度,就可能把钢板带起来,再由于自重落下来,会增加钢板表面的划痕,而且会产生较大的噪音。
技术实现思路
1、有鉴于此,本实用新型的目的在于提供一种基于真空反吹的上下料真空机械手装置,以解决背景技术中提及的不足。
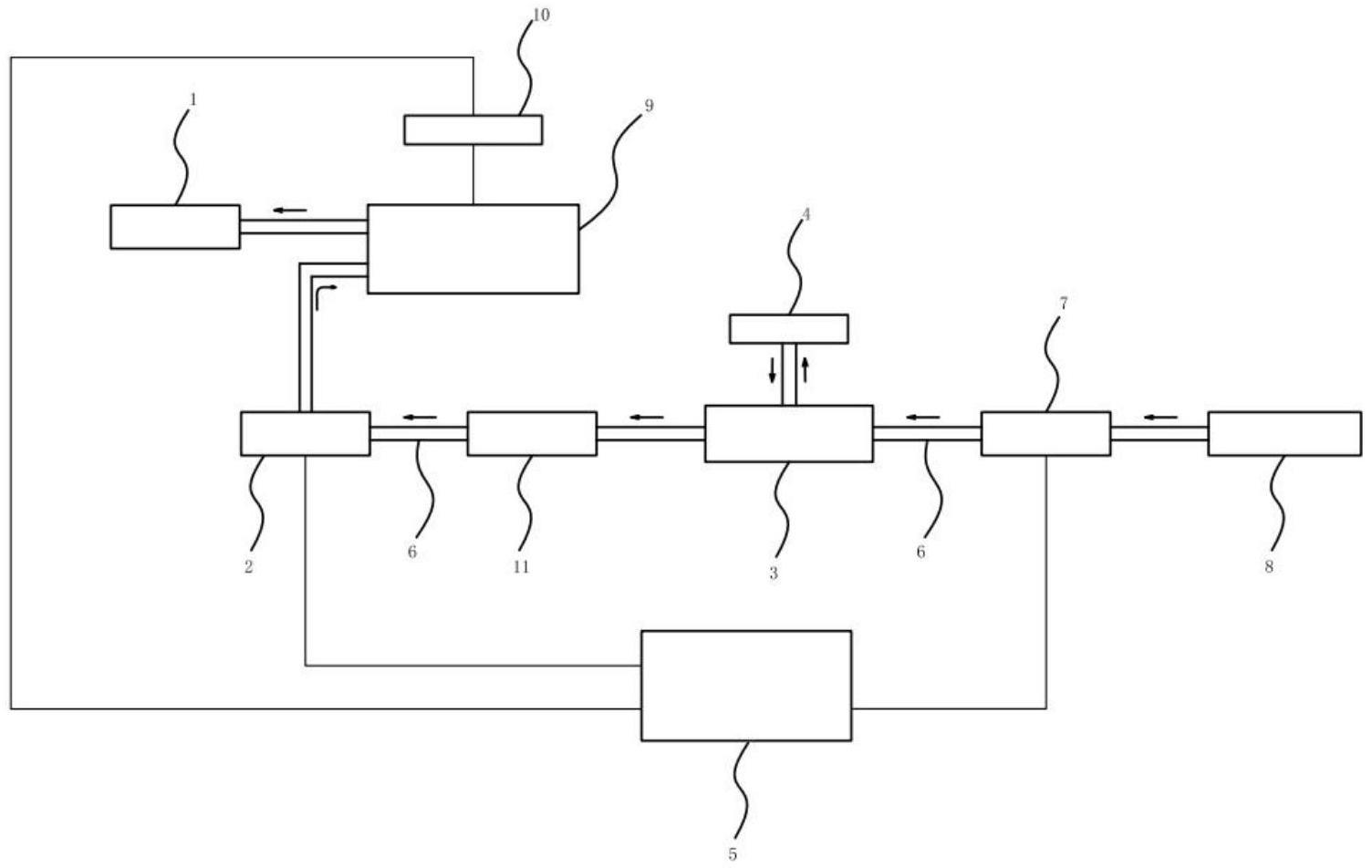
2、本实用新型的目的可通过下列技术方案来实现:一种基于真空反吹的上下料真空机械手装置,包括真空装置、吸放阀、集气管、真空吸盘和控制器,所述的真空装置、吸放阀、集气管依次通过管路连接,所述的集气管与真空吸盘连接,所述的集气管还通过管路连接反吹阀,所述的反吹阀通过管路连接外接高压气源,所述的吸放阀、反吹阀、真空装置均与所述的控制器电性连接。
3、在上述的基于真空反吹的上下料真空机械手装置中,所述的真空装置与所述的吸放阀之间还设有真空储气罐,所述的真空储气罐上设有真空传感器,所述的真空传感器与所述的控制器电性连接。
4、在上述的基于真空反吹的上下料真空机械手装置中,所述的外接高压气源为高压储气罐、高压气泵或空气压缩机中的一种。
5、在上述的基于真空反吹的上下料真空机械手装置中,所述的外接高压气源的气压值范围为5kg/min~8kg/min。
6、在上述的基于真空反吹的上下料真空机械手装置中,所述的吸放阀和反吹阀均为电磁阀。
7、在上述的基于真空反吹的上下料真空机械手装置中,所述的吸放阀和所述的集气管之间的管路上还设有过滤器。
8、在上述的基于真空反吹的上下料真空机械手装置中,所述的真空装置为真空泵或者真空发生器。
9、与现有技术相比,本基于真空反吹的上下料真空机械手装置具有以下优点:通过真空反吹功能,加快了真空吸盘内的真空破坏速度,钢板就不会跟着机械手上行,不会增加钢板表面划痕,也没有钢板落下来产生的噪音,不仅提升了效率,还保证了钢板的质量。
技术特征:
1.一种基于真空反吹的上下料真空机械手装置,包括真空装置(1)、吸放阀(2)、集气管(3)、真空吸盘(4)和控制器(5),所述的真空装置(1)、吸放阀(2)、集气管(3)依次通过管路(6)连接,所述的集气管(3)与真空吸盘(4)连接,其特征在于,所述的集气管(3)还通过管路(6)连接反吹阀(7),所述的反吹阀(7)通过管路(6)连接外接高压气源(8),所述的吸放阀(2)、反吹阀(7)、真空装置(1)均与所述的控制器(5)电性连接。
2.根据权利要求1所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的真空装置(1)与所述的吸放阀(2)之间还设有真空储气罐(9),所述的真空储气罐(9)上设有真空传感器(10),所述的真空传感器(10)与所述的控制器(5)电性连接。
3.根据权利要求1或2所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的外接高压气源(8)为高压储气罐、高压气泵或空气压缩机中的一种。
4.根据权利要求3所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的外接高压气源(8)的气压值范围为5kg/min~8kg/min。
5.根据权利要求1或2所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的吸放阀(2)和反吹阀(7)均为电磁阀。
6.根据权利要求1或2所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的吸放阀(2)和所述的集气管(3)之间的管路(6)上还设有过滤器(11)。
7.根据权利要求1或2所述的基于真空反吹的上下料真空机械手装置,其特征在于,所述的真空装置(1)为真空泵或者真空发生器。
技术总结
本技术提供了一种基于真空反吹的上下料真空机械手装置,属于真空工装治具技术领域。本基于真空反吹的上下料真空机械手装置包括真空装置、吸放阀、集气管、真空吸盘和控制器,真空装置、吸放阀、集气管依次通过管路连接,集气管与真空吸盘连接,集气管还通过管路连接反吹阀,反吹阀通过管路连接外接高压气源,吸放阀、反吹阀、真空装置均与控制器电性连接。本基于真空反吹的上下料真空机械手装置能够稳定高效的取放钢板且能够保证钢板不受损伤,且不会产生额外噪声,实用性好,具有较高的推广效益。
技术研发人员:张文昌,海达
受保护的技术使用者:嘉兴齐仁科技有限公司
技术研发日:20221226
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!