一种用于小型货物的搬运机器人及仓储系统的制作方法
本技术属于智能仓储,更具体地说,涉及一种用于小型货物的搬运机器人及仓储系统。
背景技术:
1、传统的企业仓储一般是人工来存取货物,不仅工作效率低、劳动强度大,而且仓库占用面积大。但随着电子商务的日益发展,与之配套的物流产业也在不断发展创新,物流效率一直是各个企业急需解决的一个难题。为了提高仓库运营效率,降低物流成本,各大企业纷纷研发物流配送机器人,助推企业仓储物流系统升级优化。
2、现有agv物流仓库拣选车在进行货物的拣选过程中,利用拣选车前端的插块置于待选货物的底部对货物进行起重后,挑选车开始活动进行货物的拣选,但该种方式并不适用于一些小件物品的自动拣选。
3、经检索,中国专利申请号为201821813281.2的申请案,公开了一种货物拣选系统。该申请案包括至少一层载物架,每层所述载物架包括至少一个用于存放货物的货位;以及拣选车,所述的拣选车通过攀爬机构,可在所述货架上向上及向下运行,并能够脱离所述货架运行,用于货物的装卸和运送。但该申请案中,相邻的两个货架间需要留有供拣选车运行的巷道,从而不利于对整个仓存空间的利用。
技术实现思路
1、1、要解决的问题
2、针对以上现有技术中存在的至少一些问题,本实用新型提出一种用于小型货物的搬运机器人及仓储系统。本实用新型的搬运机器人可实现对小件物品进行自动转运,提高工作效率,减少工人的劳动强度;
3、另外,本实用新型的仓储系统还能够充分利用的仓库的存储空间。
4、2、技术方案
5、为了解决上述问题,本实用新型所采用的技术方案如下:
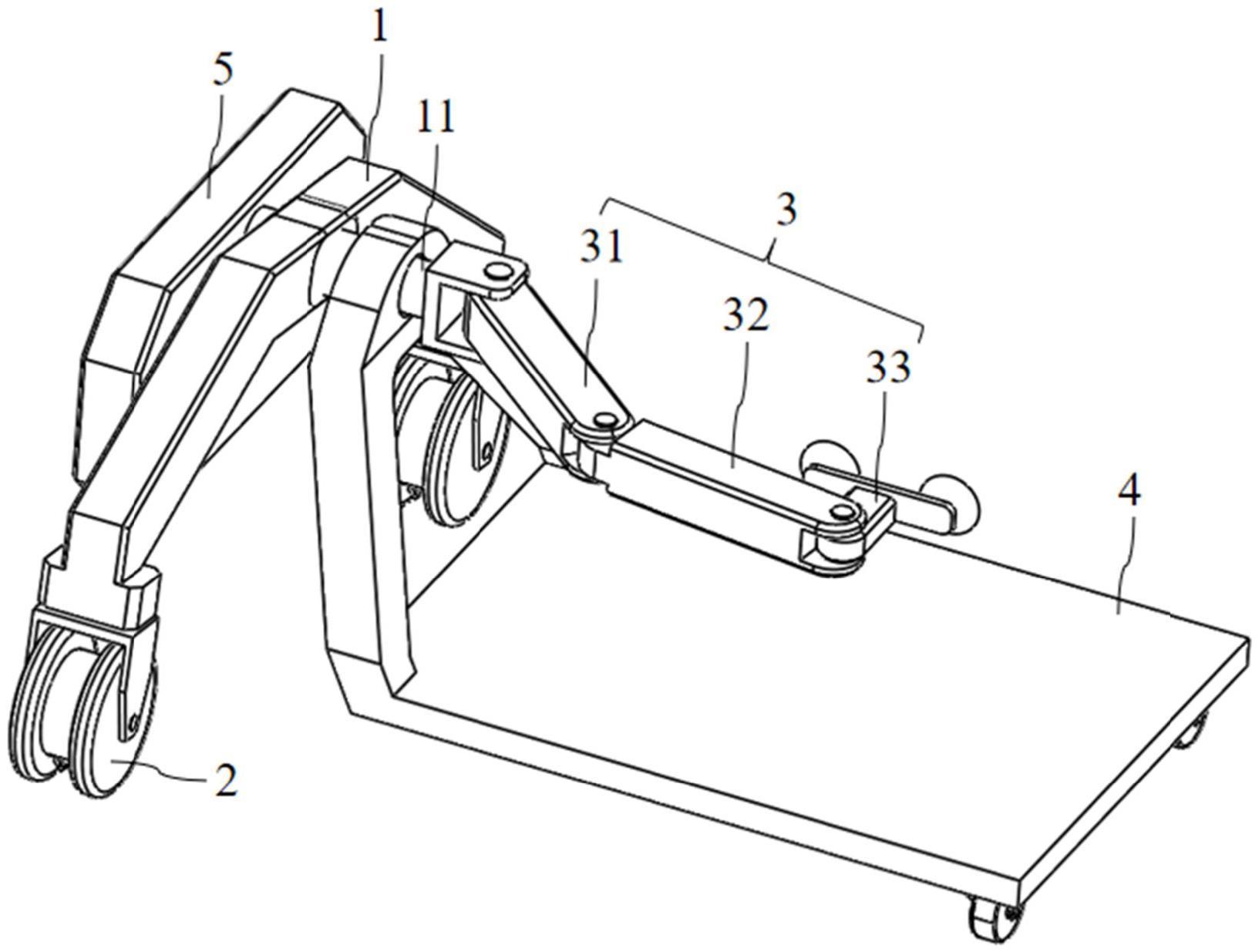
6、本实用新型的一种用于小型货物的搬运机器人,包括机架,所述机架的两端设有驱动轮,所述的机架还连接有用于对待转移物品进行夹取的夹取组件,以及用于承载待转移物品的托盘,其中,所述的夹取组件位于托盘的上方,且托盘始终保持水平状态。
7、进一步地,所述的夹取组件包括相互铰接的第一连接杆和第二连接杆,其中,第二连接杆的端部铰接有抓取件。
8、进一步地,所述的机架贯穿设有连接轴,夹取组件、托盘均与该连接轴相连接,且两者位于机架的同侧,位于机架另一侧的连接轴上设有配重。
9、进一步地,所述的连接轴设置于机架的中心处,该连接轴的端部连接有卡槽,第一连接杆的端部卡入该卡槽内并通过销轴连接。
10、进一步地,所述的驱动轮为舵轮,抓取件为吸盘。
11、进一步地,所述的托盘连接水平仪,托盘、第一连接杆、第二连接杆以及抓取件均由各自的电机进行驱动。
12、本实用新型的一种仓储系统,包括若干货架,所述的货架包括立柱和层板,所述的立柱和层板上均设有供上述的搬运机器人移动的轨道。
13、进一步地,所述立柱上的轨道包括第一轨道和第二轨道,其中,所述的第二轨道转动设置在立柱上,该第二轨道转动后与层板上的第三轨道相对接。
14、进一步地,所述的第二轨道与立柱之间通过转动轴进行连接,且该转动轴处设置有球头柱塞,以方便第二轨道进行固定角度的转动。
15、3、有益效果
16、相比于现有技术,本实用新型的有益效果为:
17、(1)本实用新型的一种用于小型货物的搬运机器人,所述机架的两端设有驱动轮,该机架连接有用于对待转移物品进行夹取的夹取组件,以及用于承载待转移物品的托盘,其中,所述的驱动轮可采用舵轮,该舵轮沿着货架上的轨道爬行至目标位置,然后由夹取组件对目标物品进行夹取并放置在托盘上,从而实现对小件物品进行自动转运,可提高工作效率,减少工人的劳动强度;同时,该托盘始终保持水平状态,从而保证托盘上的物品始终保持在稳定状态,不易跌落。
18、(2)本实用新型的一种用于小型货物的搬运机器人,所述的夹取组件包括相互铰接的第一连接杆和第二连接杆,该第二连接杆与抓取件同样进行铰接,其中,第一连接杆、第二连接杆以及抓取件均有各自的电机进行驱动,从而使得抓取件的角度调节更加方便、灵活,以保证对目标物的精准吸附或抓取。
19、(3)本实用新型的一种仓储系统,在货架立柱与层板上均设有供搬运机器人移动的轨道,且第二轨道与立柱之间采用可转动连接,这样搬运机器人通过立柱上的第一轨道移动至第二轨道,然后第二轨道进行转动与第三轨道进行对接,接着搬运机器人沿着第三轨道移动至层板上的目标位置;这种设计,无需在相邻货架之间留有供搬运机器人行走的专用巷道,从而有利于提高对整个仓储空间的利用率;同时,第二轨道与立柱通过转动轴进行连接,且该转动轴处设有球头柱塞,可防止第二轨道的转动角度过大,导致与第三轨道的对接出现偏差。
技术特征:
1.一种用于小型货物的搬运机器人,包括机架(1),所述机架(1)的两端设有驱动轮(2),其特征在于:所述的机架(1)连接有用于对待转移物品进行夹取的夹取组件(3),以及用于承载待转移物品的托盘(4),其中,所述的夹取组件(3)位于托盘(4)的上方,且托盘(4)始终保持水平状态。
2.根据权利要求1所述的一种用于小型货物的搬运机器人,其特征在于:所述的夹取组件(3)包括相互铰接的第一连接杆(31)和第二连接杆(32),其中,第二连接杆(32)的端部铰接有抓取件(33)。
3.根据权利要求1或2所述的一种用于小型货物的搬运机器人,其特征在于:所述的机架(1)贯穿设有连接轴(11),夹取组件(3)、托盘(4)均与该连接轴(11)相连接,且两者位于机架(1)的同侧,位于机架(1)另一侧的连接轴(11)上设有配重(5)。
4.根据权利要求3所述的一种用于小型货物的搬运机器人,其特征在于:所述的连接轴(11)设置于机架(1)的中心处,该连接轴(11)的端部连接有卡槽(12),第一连接杆(31)的端部卡入该卡槽(12)内并通过销轴(13)连接。
5.根据权利要求4所述的一种用于小型货物的搬运机器人,其特征在于:所述的驱动轮(2)为舵轮,抓取件(33)为吸盘。
6.根据权利要求5所述的一种用于小型货物的搬运机器人,其特征在于:所述的托盘(4)连接水平仪,托盘(4)、第一连接杆(31)、第二连接杆(32)以及抓取件(33)均由各自的电机进行驱动。
7.一种仓储系统,包括若干货架,所述的货架包括立柱(61)和层板(62),其特征在于:所述的立柱(61)和层板(62)上均设有供权利要求1-6中任一项所述的搬运机器人移动的轨道。
8.根据权利要求7所述的一种仓储系统,其特征在于:所述立柱(61)上的轨道包括第一轨道(71)和第二轨道(72),其中,所述的第二轨道(72)转动设置在立柱(61)上,该第二轨道(72)转动后与层板(62)上的第三轨道(73)相对接。
9.根据权利要求8所述的一种仓储系统,其特征在于:所述的第二轨道(72)与立柱(61)之间通过转动轴(8)进行连接。
技术总结
本技术公开了一种用于小型货物的搬运机器人及仓储系统,属于智能仓储技术领域。本技术的搬运机器人包括机架,所述机架的两端设有驱动轮,所述的机架还连接有用于对待转移物品进行夹取的夹取组件,以及用于承载待转移物品的托盘,其中,所述的夹取组件位于托盘的上方,且托盘始终保持水平状态。本技术的搬运机器人能实现对小件物品进行自动转运,可提高工作效率,减少工人的劳动强度。另外,本技术的一种仓储系统,通过第二轨道的设置,使得搬运机器人可以在货架立柱与层板之间自由转移,无需在相邻货架之间留有供搬运机器人行走的专用巷道,从而有利于提高对整个仓储空间的利用率。
技术研发人员:秦方瑞
受保护的技术使用者:安徽斯塔克机器人有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!