货物搬运方法及系统、设备、存储介质与流程
本申请实施例涉及物流应用技术,涉及但不限于一种货物搬运方法及系统、设备、存储介质。
背景技术:
1、传统的电气机械和器材制造业车间在进行线卷的搬运和与自动化设备完成对接工作时,一般是由传统的人工叉车实现的。
2、但传统的人工叉车在作业时,对于运输通道的宽度需求较大、且安全性、效率和信息化程度均较低。另外,人工叉车也无法兼顾多任务类型、与产线节拍紧密对接、与仓储系统信息准确交互的情况。因此,如何提高货物的搬运效率和搬运安全性,是一个亟待解决的问题。
技术实现思路
1、有鉴于此,本申请实施例提供的货物搬运方法及系统、设备、存储介质,能够提高对线卷的搬运效率和搬运安全性。本申请实施例提供的货物搬运方法及系统、设备、存储介质是这样实现的:
2、本申请实施例提供的货物搬运方法,包括:
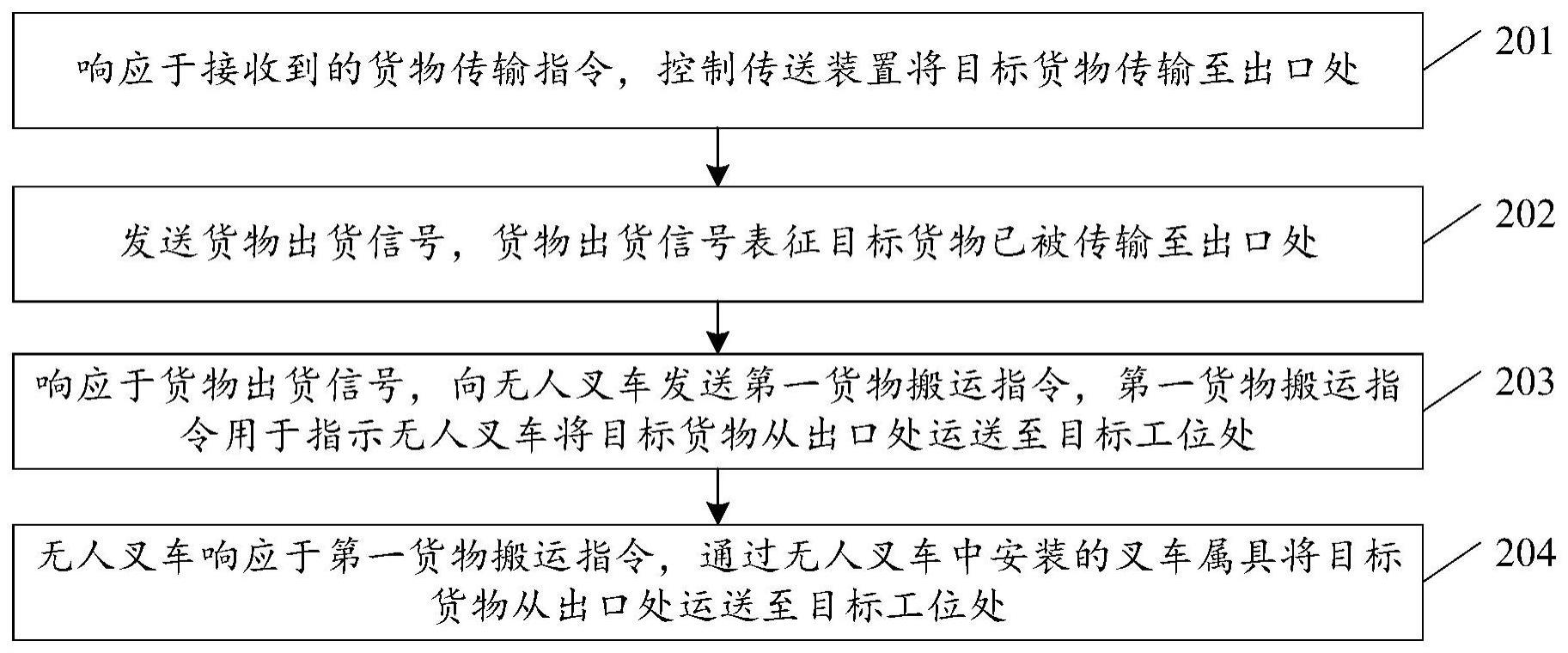
3、响应于接收到的货物传输指令,控制传送装置将目标货物传输至出口处;
4、发送货物出货信号,货物出货信号表征目标货物已被传输至出口处;
5、响应于货物出货信号,向无人叉车发送第一货物搬运指令,第一货物搬运指令用于指示无人叉车将目标货物从出口处运送至目标工位处;
6、无人叉车响应于第一货物搬运指令,通过叉车属具将目标货物从出口处运送至目标工位处。
7、在一些实施例中,在响应于接收到的货物传输指令之前,所述方法还包括:无人叉车响应于接收到的原料上线指令,将货物原料从原料下线点搬运至原料处理点;无人叉车响应于接收到的货物存储指令,通过叉车属具将目标货物从原料处理点搬运至存储区进行存储,目标货物为在原料处理点对货物原料处理得到。
8、在一些实施例中,叉车属具为串杆属具,货物原料为丝线,目标货物为线卷,线卷为在原料处理点对线丝进行缠绕加工制得,串杆属具能够插设于线卷的中空内腔中,以实现对线卷的叉取。
9、在一些实施例中,原料处理点为多个,无人叉车响应于接收到的原料上线指令,将货物原料从原料下线点搬运至原料处理点,包括:
10、获取每一原料处理点的当前工作状态和每一原料处理点的位置信息;根据每一原料处理点的当前工作状态和位置信息,确定与无人叉车距离最近且处于空闲工作状态的原料处理点为目标原料处理点;向无人叉车发送原料上线指令,原料上线指令用于指示无人叉车将货物原料从原料下线点搬运至目标原料处理点;无人叉车响应于原料上线指令,将货物原料从原料下线点搬运至目标原料处理点。
11、在一些实施例中,所述方法还包括:
12、无人叉车响应于接收到的第二货物搬运指令,通过叉车属具将数量小于第一阈值的目标货物从出口处运送至货物缓存区,货物缓存区与目标工位的距离小于出口处与目标工位的距离。
13、在一些实施例中,所述方法还包括:
14、无人叉车响应于接收到的第三货物搬运指令,通过叉车属具将目标货物从货物缓存区运送至目标工位处。
15、在一些实施例中,所述方法还包括:
16、无人叉车响应于接收到的货物归放指令,将未使用完的目标货物从目标工位处运送至原料处理点,以将未使用完的目标货物重新处理为货物原料。
17、在一些实施例中,所述方法还包括:
18、接收无人叉车发送的指令完成反馈;响应于指令完成反馈,更新货物搬运系统的库存状态。
19、本申请实施例提供的货物搬运系统,包括无人叉车、存储区和控制设备,无人叉车包括叉车属具,存储区包括传送装置和仓库管理系统,所述系统包括:
20、存储区的仓库管理系统响应于接收到的货物传输指令,控制传送装置将打包线卷传输至出口处;
21、仓库管理系统向控制设备发送货物出货信号,货物出货信号表征打包线卷已被传输至出口处;
22、控制设备响应于货物出货信号,向无人叉车发送第一货物搬运指令,第一货物搬运指令用于指示无人叉车将目标货物从出口处运送至目标工位处;
23、无人叉车响应于第一货物搬运指令,通过叉车属具将目标货物从出口处运送至目标工位处。
24、本申请实施例提供的计算机设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,所述处理器执行所述程序时实现本申请实施例所述的方法。
25、本申请实施例提供的计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现本申请实施例提供的所述的方法。
26、本申请实施例所提供的货物搬运方法、系统、计算机设备和计算机可读存储介质,通过响应于接收到的货物传输指令,控制传送装置将目标货物传输至出口处;发送货物出货信号,货物出货信号表征目标货物已被传输至出口处;响应于货物出货信号,向无人叉车发送第一货物搬运指令,第一货物搬运指令用于指示无人叉车将目标货物从出口处运送至目标工位处;无人叉车响应于第一货物搬运指令,通过叉车属具将目标货物从出口处运送至目标工位处。这样,能够提高对货物的搬运效率和搬运安全性,从而解决背景技术中所提出的技术问题。
技术特征:
1.一种货物搬运方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在响应于接收到的货物传输指令之前,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述叉车属具为串杆属具,所述货物原料为丝线,所述目标货物为线卷,所述线卷为在所述原料处理点对线丝进行缠绕加工制得,所述串杆属具能够插设于所述线卷的中空内腔中,以实现对所述线卷的叉取。
4.根据权利要求2所述的方法,其特征在于,所述原料处理点为多个,所述无人叉车响应于接收到的原料上线指令,将货物原料从原料下线点搬运至原料处理点,包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的方法,其特征在于,所述方法还包括:
9.一种货物搬运系统,其特征在于,包括无人叉车、存储区和控制设备,所述无人叉车包括叉车属具,所述存储区包括传送装置和仓库管理系统,所述系统包括:
10.一种计算机设备,包括存储器和处理器,所述存储器存储有可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1至8任一项所述方法的步骤。
技术总结
本发明公开了一种货物搬运方法及系统、设备、存储介质;所述方法包括:响应于接收到的货物传输指令,控制传送装置将目标货物传输至出口处;发送货物出货信号,货物出货信号表征目标货物已被传输至出口处;响应于货物出货信号,向无人叉车发送第一货物搬运指令,第一货物搬运指令用于指示无人叉车将目标货物从出口处运送至目标工位处;无人叉车响应于第一货物搬运指令,通过无人叉车中安装的叉车属具将目标货物从出口处运送至目标工位处。能够提高对货物的搬运效率和搬运安全性。
技术研发人员:杨建辉,李陆洋,方牧,鲁豫杰,王茂盛
受保护的技术使用者:未来机器人(深圳)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!