一种基于激光切割工件运输除尘系统及方法与流程
本发明涉及自动化领域,更具体的说是一种基于激光切割工件运输除尘系统及方法。
背景技术:
1、随着轻重工业的快速发展,越来越多的制造模式开始遵循自动化、无人化,通过快速更换机器模具以及产品夹具的一系列操作可以创造出更多的利润。例如:cn217799579u,激光切割除尘结构,本实用新型公开了一种激光切割除尘结构,包括:载具,用于托载片材;激光切割组件,与所述载具相对设置,用于对所述载具上的片材进行激光切割;除尘装置,对应片材设定的切缝设置,用于从片材靠近所述激光切割组件的一侧以及远离所述激光切割组件的一侧对片材设定的切缝进行除尘。采用上述结构设置的本实用新型,在激光切割组件对载具上的片材进行切割的时候,可以通过除尘装置从切缝靠近激光切割组件的一侧和远离激光切割组件的一侧及时除尘,并且能够针对切缝进行负压除尘,提高除尘效果,降低除尘能耗,进而降低成本,可以确保片材的稳定性。该实用新型在对切缝进行除尘作业时能够在激光剖切范围外进行除尘,但是只能局限于单一工件的使用,若更换产品则需要更换相关模具,较为繁琐。例如:cn207061207u,一种新型步进式阶梯送料机,本实用新型公开了一种新型步进式阶梯送料机,包括漏斗,漏斗下端设置有漏斗支撑腿,漏斗支撑腿下端连接有运送带,运送带上端设置有阶梯运输槽,且运送带内部设置有分隔板,分隔板之间设置有储料槽,运送带右端上侧设置有定滑轮,且运送带下方设置有导料槽,且运送带左端下方连接有斜传送带,斜传送带下端连接有组合链,组合链上端设置有水平运输槽,且组合链的右侧末端设置有从动轮,从动轮通过组合链连接有主动轮,主动轮通过传送带连接有电机转动轮,电机转动轮上端设置有步进电机,步进电机下端设置有电机支撑架,从动轮右端连接有减速机,本送料机运输效率高,运载能力好,控制精度较高,操作简单,性能稳定,适合实现多种场合的物料输送。该实用新型主要阶梯运输部分在于斜传送带,实际效果不如倾斜型传送带更为实用,且所有阶梯运输的设计均体现在传送带中,前后并无速率相同的导料槽设计。
技术实现思路
1、本发明的目的是提供一种基于激光切割工件运输除尘系统及方法,可将纵向横向传送带工件提拉至输入轨道当中,综合多类激光切割原料实现阶梯式工件间歇式除尘运输,可使输入机构、阶梯式清扫机构、输出机构速率统一,构成大循环作业单元。
2、本发明的目的通过以下技术方案来实现:
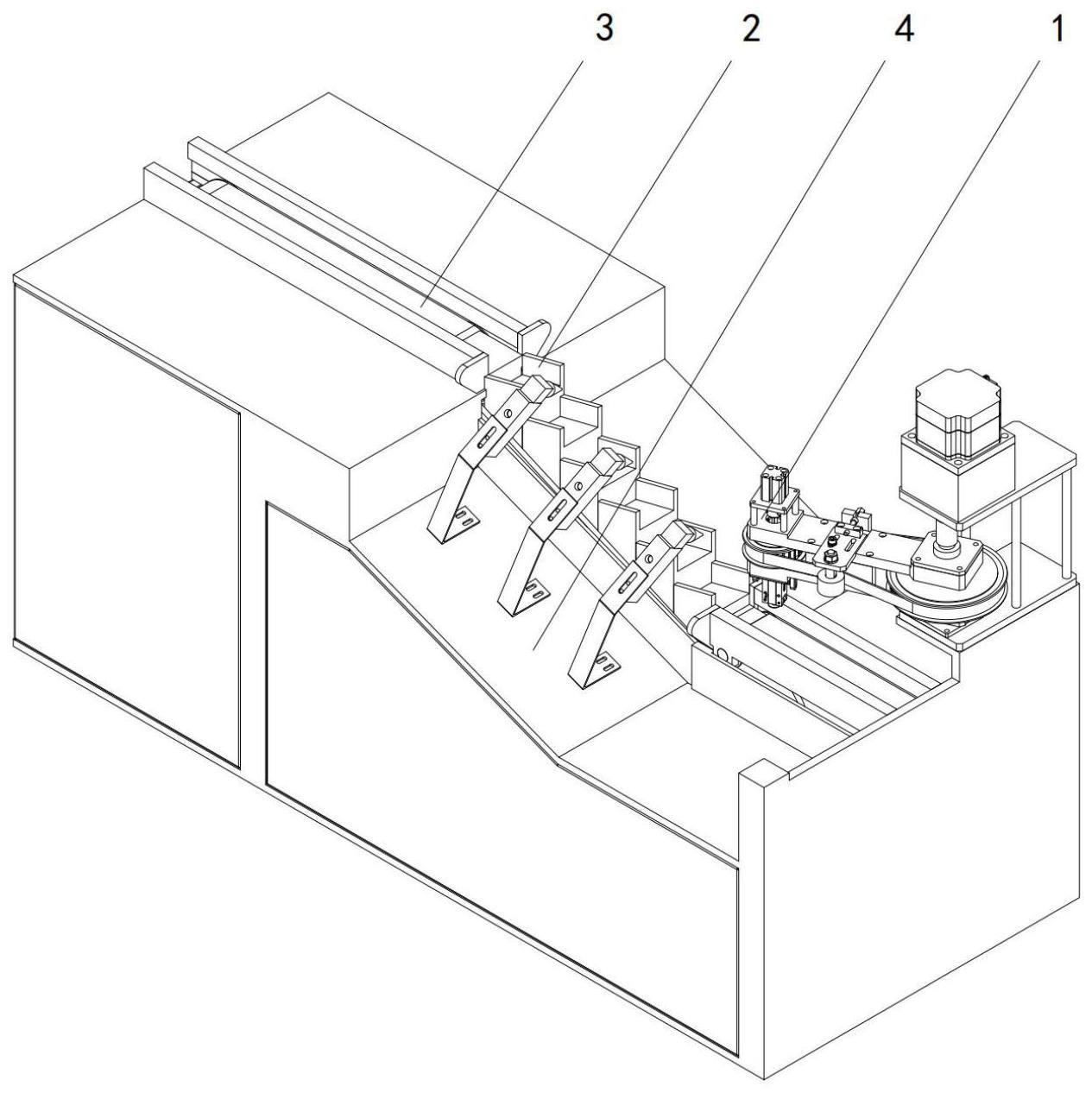
3、一种基于激光切割工件运输除尘系统,其特征在于:包括工件位移机构、阶梯式分段运输系统、进出间歇总成、机架,工件位移机构、阶梯式分段运输系统、进出间歇总成均与机架相连接,阶梯式分段运输系统与进出间歇总成相连接。
4、作为本技术方案的进一步优化,本发明一种基于激光切割工件运输除尘系统,所述工件位移机构包括机构支撑总成、吸盘集成块,其中机构支撑总成、电机a均与带轴轴座固定连接,电机a其输出轴通过联轴器a与桥接板a固定连接,桥接板b与带轮a转动连接,带轮a通过皮带a与带轮b转动连接,带轮b与主动轴固定连接,气缸a与桥接板a固定连接,气缸a其输出轴通过推杆轴与推杆轴连接块固定连接,推杆轴连接块与吸盘集成块固定连接,l型滑动轴a、l型滑动轴b均与吸盘集成块固定连接,轴a、轴b均与吸盘集成块转动连接,轴a与带轮c固定连接,轴b与带轮d固定连接,带轮c通过皮带b与带轮d转动连接,吸盘与皮带b固定连接,张紧器固定板a通过纵向调节螺母与张紧器固定板b固定连接,张紧器固定板b与张紧器固定板c固定连接,张紧器固定板c通过固定件a与桥接板a固定连接,锁紧光轴与张紧器固定板c转动连接,锁紧光轴与滑轮a固定连接。
5、作为本技术方案的进一步优化,本发明一种基于激光切割工件运输除尘系统,所述阶梯式分段运输系统包括电机b、空心轴,其中电机b其输出轴与空心轴固定连接,侧部支架a通过滑道校正板b、u型滑道固定板与侧部支架b固定连接,圆环a、圆环b、圆环c、圆环d、圆环e、圆环f均与空心轴固定连接,轴套a、轴套b均与空心轴固定连接,轴套a与侧部支架b转动连接,轴套b与侧部支架a转动连接,第一滚轮滑道、第二滚轮滑道、第三滚轮滑道、第四滚轮滑道、第五滚轮滑道、第六滚轮滑道均与u型滑道固定板连接,第一滚轮滑道与圆环a连接,第二滚轮滑道与圆环b连接,第三滚轮滑道与圆环c连接,第四滚轮滑道与圆环d连接,第五滚轮滑道与圆环e连接,第六滚轮滑道与圆环f连接。
6、作为本技术方案的进一步优化,本发明一种基于激光切割工件运输除尘系统,所述进出间歇总成包括四通道滑轮连杆、八通道连杆轴,其中轴c与四通道滑轮连杆固定连接,轴座a与轴c转动连接,四通道滑轮连杆与八通道连杆轴转动连接,八通道连杆轴与轴d转动连接,八通道连杆轴与连杆轴a固定连接,连杆轴a通过曲柄a与z型连杆转动连接,曲柄a通过z型连杆与曲柄b转动连接,曲柄b通过连杆轴b与连杆轴支架转动连接,连杆轴a、连杆轴b均与连杆轴支架转动连接,连杆轴支架与带轮e固定连接,带轮e通过皮带c与带轮f转动连接,带轮f、带轮g、带轮j均与轴d固定连接,轴d与轴座b、轴座c转动连接,带轮g通过、皮带d与带轮h、带轮i转动连接,带轮h、带轮i均与轨道护条a、轨道护条b转动连接,带轮j通过皮带e与带轮k转动连接,带轮k、带轮l均与轴e固定连接,轴e与轴座d转动连接,带轮l通过皮带f与带轮m、带轮n、带轮o、带轮p转动连接,带轮m、带轮n均与l型固定板转动连接。
7、作为本技术方案的进一步优化,本发明一种基于激光切割工件运输除尘系统,所述机架包括框架,其中轨道护条c、轨道护条d、u型背板、盖板a、盖板b、调节气枪a、调节气枪b、调节气枪c均与框架固定连接。
8、一种激光切割工件运输方法,具体通过上文权利要求的一种基于激光切割工件运输除尘系统来实现,可将纵向横向传送带工件提拉至输入轨道当中,综合多类激光切割原料实现阶梯式工件间歇式除尘运输,可使输入机构、阶梯式清扫机构、输出机构速率统一,构成大循环作业单元,包括以下步骤:
9、s1、在传统的激光切割工件中,由于不同材料所赋予的不同特性,以至于在切割作业后所产生的粉尘颗粒数量均不同,而部分材料由于精密配合必须要在自动化产线中加入工件清洁工序,本发明提供一种不同方向流水线的工件位移机构1,其运行流程为启动电机a103,其输出轴通过联轴器a104带动桥接板a105转动,桥接板a105通过主动轴112带动桥接板b106转动,桥接板a105、桥接板b106转动时带轮a107通过皮带a108带动带轮b109转动,皮带a108转动时带动滑轮a129转动,形成皮带的张紧效果,将位移机构的大臂活性连接,当桥接板a105、桥接板b106转动至流水线工件上方时启动气缸a110,其输出轴通过推杆轴111推动推杆轴连接块113上下运动,推杆轴连接块113运动时带动吸盘集成块114上下运动,并通过l型滑动轴a115、l型滑动轴b116沿着桥接板b106的轨道凹槽内上下滑动,增加其精密程度,吸盘集成块114上下运动时通过皮带b121带动吸盘122对传送带上的工件进行吸附作业,此时气缸a110再次启动,回缩输出轴最终带动吸盘122将工件提起,由于部分异形工件的正上方并不处于平整状态,所以当工件顶部处于斜坡状时轴a117通过吸盘集成块114的轨道凹槽向内转动,迫使皮带b121呈倾斜状向下吸附,从而实现斜坡吸附的功能,工件吸附完成后再次启动电机a103,将桥接板a105、桥接板b106转动至输入流水线上方,再启动气缸a110,使得其输出轴将工件向下输送至流水线上,随后气缸a110启动将输出轴回缩,完成单次工件的抓取下放;
10、s2、与传统的间歇式运输不同,为了实现滑道输送与等分输送的统一,为了让阶梯式分段运输系统2与进出间歇总成3构成一个统一的工作组,通过两个机构各自独立作业也能组合衔接,最终收益于阶梯运输过程中的有效清洁,当吸附运输后的工件输送至皮带f330时启动电机b201,其输出轴带动空心轴202转动,空心轴202带动圆环a210、圆环b211、圆环c212、圆环d213、圆环e214、圆环f215转动,由于圆环a210、圆环b211、圆环c212、圆环d213、圆环e214、圆环f215分布在心轴202的不同点位,所以当空心轴202转动时带动圆环a210转动圆环a210转动带动第一滚轮滑道216向下运动,当第一滚轮滑道216滑道槽口与侧部支架a203对接时工件顺着槽口滑入第一滚轮滑道216,圆环d213转动时带动第二滚轮滑道217上下运动,当圆环d213转动至一定角度时第二滚轮滑道217与第一滚轮滑道216滑道槽口对齐,工件从第一滚轮滑道216滑入第二滚轮滑道217,圆环c212转动时带动第三滚轮滑道218上下移动,当圆环c212转动至一定角度时第三滚轮滑道218与第二滚轮滑道217槽口相对,工件从第二滚轮滑道217滑入第三滚轮滑道218中,而此时第一滚轮滑道216开始重复第一步操作,重新将新工件滑入至第一滚轮滑道216中,以此工作类推,将圆环a210、圆环b211、圆环c212、圆环d213、圆环e214、圆环f215与第一滚轮滑道216、第二滚轮滑道217、第三滚轮滑道218、第四滚轮滑道219、第五滚轮滑道220、第六滚轮滑道221的配合关系形成一个工件间歇式等分运输系统,这使得每一个工件在阶梯运输的过程中由、调节气枪a407、调节气枪b408、调节气枪c409完成表面灰尘颗粒的清理;
11、s3、为了实现工件位移机构1、阶梯式分段运输系统2、进出间歇总成3构成一个统一的大单元作业环境,达到最高的协调程度,当阶梯式分段运输系统2开始工作时带动空心轴202转动,空心轴202转动带动轴c302转动,轴c302通过四通道滑轮连杆303带动八通道连杆轴304转动,八通道连杆轴304带动连杆轴a306转动,连杆轴a306通过曲柄a307带动z型连杆308转动,z型连杆308通过曲柄b309带动连杆轴b310转动,连杆轴b310带动带轮e312转动,带轮e312通过皮带c313带动带轮f314转动,带轮f314通过轴d315带动带轮g316、带轮j324转动,带轮g316通过h318、带轮i319带动皮带d317转动,完成了工件初始输入流水线的搭建,而输出间隔停顿与速率则是完全与阶梯式分段运输系统2的运输速率是一致的,带轮j324通过皮带e325带动带轮k326转动,带轮k326转动时通过轴e327带动带轮l328转动,带轮l328通过m331、带轮n332、带轮o333、带轮p334带动皮带f330转动,形成后部的输出流水线,速率与中部阶梯运输以及前部工件输入保持一致,构成一个工件运输的整体。
12、本发明一种基于激光切割工件运输除尘系统及方法的有益效果为:
13、本发明的一种基于激光切割工件运输除尘系统及方法,其有益效果为:1、可将纵向横向传送带工件提拉至输入轨道当中,综合多类激光切割原料实现阶梯式工件间歇式除尘运输;2、可使输入机构、阶梯式清扫机构、输出机构速率统一,构成大循环作业单元。
- 还没有人留言评论。精彩留言会获得点赞!