一种仓储安全系统的制作方法
本申请涉及仓储物流,尤其涉及一种仓储安全系统。
背景技术:
1、在工业4.0的背景下,机器人技术的蓬勃发展为整个物流行业带来了巨大的技术变革,当前主流机器人解决方案主要包括两种:货架到人和货箱到人。货架到人是指机器人搬运货架到工作站,完成待拣选任务;货箱到人是指机器人搬运货箱到工作站完成拣选任务。
2、现代机器人智能化水平高度提升的同时,人机交互时的安全保护问题不容忽视。尤其是在上架作业环节,由于操作人员往往需要与机器人之间进行大量的配合才能完成货物的上架。在这个过程中,操作人员也有可能因操作需要靠近机器人,或者因误操作而进入机器人区。此时,若机器人直接朝向操作人员快速移动,很有可能会对操作人员进行冲撞,从而给操作人员带来一定的安全风险。
3、有鉴于此,如何在上架作业环节进行安全方案的设计,达到既能保证机器人正常作业又能保障操作人员安全的目的,是亟待解决的问题。
技术实现思路
1、本申请实施例提供了一种仓储安全系统,以解决目前上架作业环节中,操作人员在与机器人交互时缺乏安全保护的问题。
2、本申请实施例提供一种仓储安全系统,包括运行于机器人区的搬运机器人、设置于人工区的工作站、分别穿设于所述机器人区和所述人工区的输送装置,以及检测装置,所述工作站用于对容器进行处理,所述输送装置用于将所述容器由所述人工区输送至所述机器人区,所述搬运机器人用于将所述容器由所述输送装置转运至所述机器人区的货位;
3、所述检测装置包括容器检测单元和越位检测单元,以及分别与所述容器检测单元和所述越位检测单元电连接的控制单元;其中,所述容器检测单元设置于所述输送装置的输送路径上,以对所述容器在所述输送装置中的位置进行检测,并向所述控制单元发送检测信号;
4、所述越位检测单元设置于所述工作站,以在检测到有物体由所述人工区进入所述机器人区时,向所述控制单元发送越位信号;
5、所述控制单元还分别与所述输送装置和所述搬运机器人电连接,且所述控制单元响应于接收到的所述检测信号,控制所述越位检测单元开启,以及响应于接收到的所述越位信号,控制所述输送装置和所述搬运机器人停止运动。
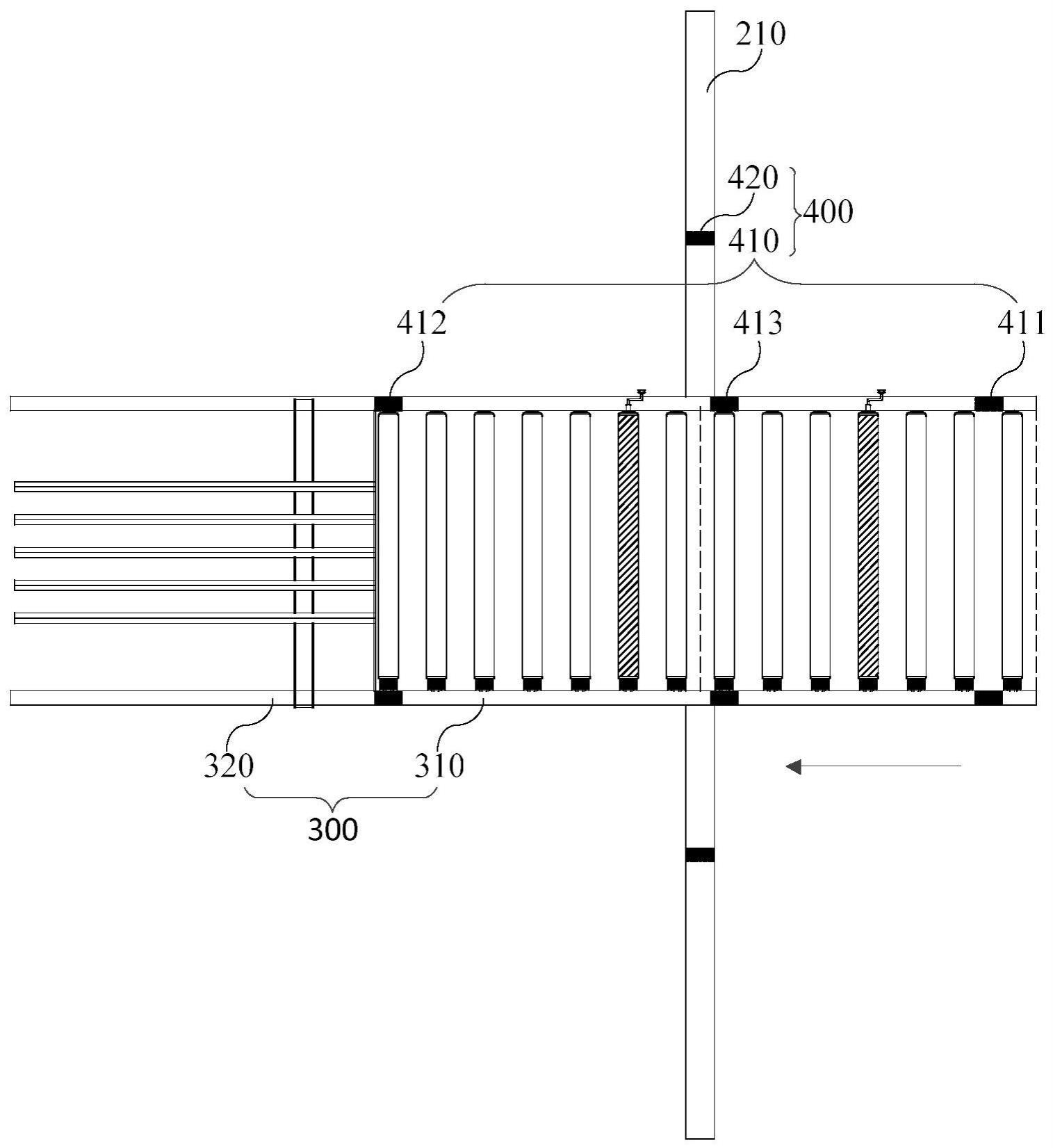
6、在一种可行的实现方式中,所述输送装置包括相连接的滚筒输送线和缓存架,所述工作站开设有供所述滚筒输送线穿过的工作窗口;所述容器检测单元包括第一检测元件,所述第一检测元件设置于所述滚筒输送线远离所述缓存架的一侧,且所述第一检测元件用于向所述控制单元发送第一检测信号;所述控制单元响应于接收到的所述第一检测信号,控制所述越位检测单元开启。
7、在一种可行的实现方式中,所述容器检测单元还包括设置于所述滚筒输送线的第二检测元件和第三检测元件,所述第二检测元件设置于所述滚筒输送线靠近所述缓存架的一侧,所述第三检测元件设置于所述第一检测元件和所述第二检测元件之间,且位于所述工作站靠近所述第一检测元件一侧,所述第二检测元件和所述第三检测元件用于向所述控制单元发送第二检测信号和第三检测信号;所述控制单元响应于接收到的所述第二检测信号,控制所述滚筒输送线停止运动,以及响应于接收到的所述第三检测信号,控制所述越位检测单元关闭。
8、在一种可行的实现方式中,所述第一检测元件与所述第三检测元件之间具有第一间距,所述第二检测元件与所述第三检测元件之间具有第二间距,所述第一间距和所述第二间距的长度均大于所述容器的长度。
9、在一种可行的实现方式中,所述容器检测单元和所述越位检测单元均包括发射端和接收端,且所述发射端和所述接收端分别相对设置于所述滚筒输送线垂直于输送方向的两侧。
10、在一种可行的实现方式中,所述输送装置包括相连接的无动力输送线和缓存架,所述容器检测单元设置于所述无动力输送线和所述缓存架的连接处;所述工作站开设有供所述无动力输送线穿过的工作窗口,所述越位检测单元设置于所述工作窗口处,且所述越位检测单元与所述容器检测单元之间的距离大于所述容器的长度。
11、在一种可行的实现方式中,所述仓储安全系统还包括与所述控制单元电连接的扫描器,所述扫描器用于对所述容器的序号和所述工作站的标识码进行扫描,并向所述控制单元发送入库申请;所述控制单元响应于接收到的所述检测信号,控制所述越位检测单元开启,以及响应于接收到的所述入库申请,控制所述越位检测单元关闭。
12、在一种可行的实现方式中,所述检测装置还包括分别与所述控制单元电连接的指示灯和报警器,所述指示灯用于根据所述控制单元接收到的所述检测信号和所述越位信号,发出指示信号以指示所述工作站的运行状态,所述报警器用于根据所述控制单元接收到的所述越位信号,发出报警信号。
13、在一种可行的实现方式中,所述仓储安全系统还包括设置于所述工作站的急停复位控制盒,所述急停复位控制盒分别与所述搬运机器人和所述报警器电连接;并且,所述急停复位控制盒包括急停开关和复位按钮,所述急停开关响应于所述报警器发出的所述报警信号,控制所述搬运机器人停止运动,所述复位按钮响应于按压动作,控制所述搬运机器人恢复运动。
14、在一种可行的实现方式中,所述仓储安全系统还包括与所述工作站相连接的围栏,且所述围栏位于所述机器人区和所述人工区之间,以实现所述机器人区与所述人工区之间的分隔。
15、在一种可行的实现方式中,所述机器人区与所述人工区之间留有安全间隙。
16、在一种可行的实现方式中,所述容器检测单元和所述越位检测单元均为红外线传感器、光电传感器或超声波传感器中的一种。
17、由于采用了上述技术方案,本申请所取得的技术效果为:
18、本申请提供的一种仓储安全系统,应用于通过输送装置对容器进行上架作业的场景中,通过检测装置的设置来分别对机器人区的容器和人工区中的操作人员等进行实时检测,从而防止操作人员因不当操作而误入机器人区时,搬运机器人直接冲向操作人员,进而有利于保证操作人员的人身安全和仓储系统的稳定运行。具体地,检测装置包括容器检测单元和越位检测单元,以及分别与两者电连接的控制单元,控制单元在接收到容器检测单元发送的检测信号时,表明输送装置开始运输容器,上架作业过程开始启动;此时,为防止操作人员误操作,需要及时打开越位检测单元,以对机器人区和人工区交界处可能发生的交互动作进行检测,即控制单元控制越位检测单元开启。并且,控制单元在接收到越位检测单元发送的越位信号时,表明有物体(如操作人员的手、脚等)由人工区进入到机器人区,即认为操作人员可能出现了误操作,此时为避免机器人区中的搬运机器人直接冲向操作人员,控制单元控制输送装置和搬运机器人停止运动,从而大大降低了操作人员受到伤害的风险。
19、本申请提供的仓储安全系统,通过检测装置中设置的各检测元件与输送装置、搬运机器人、工作站等的联动配合,极大提升了系统整体的安全性和可靠性,有利于上架作业过程的稳定运行,不仅能够保证搬运机器人的正常作业,也能够保障操作人员的安全。
技术特征:
1.一种仓储安全系统,其特征在于,包括运行于机器人区(100)的搬运机器人(110)、设置于人工区(200)的工作站(210)、分别穿设于所述机器人区(100)和所述人工区(200)的输送装置(300),以及检测装置(400),所述工作站(210)用于对容器进行处理,所述输送装置(300)用于将所述容器由所述人工区(200)输送至所述机器人区(100),所述搬运机器人(110)用于将所述容器由所述输送装置(300)转运至所述机器人区(100)的货位;
2.根据权利要求1所述的仓储安全系统,其特征在于,所述输送装置(300)包括相连接的滚筒输送线(310)和缓存架(320),所述工作站(210)开设有供所述滚筒输送线(310)穿过的工作窗口;
3.根据权利要求2所述的仓储安全系统,其特征在于,所述容器检测单元(410)还包括设置于所述滚筒输送线(310)的第二检测元件(412)和第三检测元件(413),所述第二检测元件(412)设置于所述滚筒输送线(310)靠近所述缓存架(320)的一侧,所述第三检测元件(413)设置于所述第一检测元件(411)和所述第二检测元件(412)之间,且位于所述工作站(210)靠近所述第一检测元件(411)一侧,所述第二检测元件(412)和所述第三检测元件(413)用于向所述控制单元发送第二检测信号和第三检测信号;
4.根据权利要求3所述的仓储安全系统,其特征在于,所述第一检测元件(411)与所述第三检测元件(413)之间具有第一间距,所述第二检测元件(412)与所述第三检测元件(413)之间具有第二间距,所述第一间距和所述第二间距的长度均大于所述容器的长度。
5.根据权利要求2所述的仓储安全系统,其特征在于,所述容器检测单元(410)和所述越位检测单元(420)均包括发射端和接收端,且所述发射端和所述接收端分别相对设置于所述滚筒输送线(310)垂直于输送方向的两侧。
6.根据权利要求1所述的仓储安全系统,其特征在于,所述输送装置(300)包括相连接的无动力输送线(330)和缓存架(320),所述容器检测单元(410)设置于所述无动力输送线(330)和所述缓存架(320)的连接处;
7.根据权利要求6所述的仓储安全系统,其特征在于,所述仓储安全系统还包括与所述控制单元电连接的扫描器,所述扫描器用于对所述容器的序号和所述工作站(210)的标识码进行扫描,并向所述控制单元发送入库申请;
8.根据权利要求1-7任一项所述的仓储安全系统,其特征在于,所述检测装置(400)还包括分别与所述控制单元电连接的指示灯和报警器,所述指示灯用于根据所述控制单元接收到的所述检测信号和所述越位信号,发出指示信号以指示所述工作站(210)的运行状态,所述报警器用于根据所述控制单元接收到的所述越位信号,发出报警信号。
9.根据权利要求8所述的仓储安全系统,其特征在于,所述仓储安全系统还包括设置于所述工作站(210)的急停复位控制盒,所述急停复位控制盒分别与所述搬运机器人(110)和所述报警器电连接;
10.根据权利要求1-7任一项所述的仓储安全系统,其特征在于,所述仓储安全系统还包括与所述工作站(210)相连接的围栏,且所述围栏位于所述机器人区(100)和所述人工区(200)之间,以实现所述机器人区(100)与所述人工区(200)之间的分隔。
11.根据权利要求1-7任一项所述的仓储安全系统,其特征在于,所述机器人区(100)与所述人工区(200)之间留有安全间隙。
12.根据权利要求1-7任一项所述的仓储安全系统,其特征在于,所述容器检测单元(410)和所述越位检测单元(420)均为红外线传感器、光电传感器或超声波传感器中的一种。
技术总结
本申请实施例提供一种仓储安全系统,包括运行于机器人区的搬运机器人、设置于人工区的工作站、分别穿设于机器人区和人工区的输送装置,以及检测装置,检测装置包括容器检测单元和越位检测单元,以及分别与容器检测单元和越位检测单元电连接的控制单元;其中,容器检测单元对容器在输送装置中的位置进行检测,并向控制单元发送检测信号;越位检测单元在检测到有物体由人工区进入机器人区时,向控制单元发送越位信号;控制单元响应于接收到的检测信号,控制越位检测单元开启,以及响应于接收到的越位信号,控制输送装置和搬运机器人停止运动。本申请极大提升了系统整体的安全性和可靠性,有利于上架作业过程的稳定运行。
技术研发人员:王梦迪,臧栋,苏琬茵
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!