臂架收回方法、臂架系统及作业机械与流程
本发明涉及机械控制,尤其涉及一种臂架收回方法、臂架系统及作业机械。
背景技术:
1、一些作业机械上配置有折叠臂,在使用时展开,在不使用时收回。例如,折叠臂高喷消防车,这类作业机械的折叠臂具有多节臂架,造成臂架的展开姿态多样,操作难度大的情况。
2、由于臂架结构和姿态的复杂性,通常的折叠臂收回过程中,只是简单地按照顺序依次或联动收回,容易造成臂架末端高度下降,只能依靠人工控制避免臂架末端的作业工具或各节臂架的末端与地面或车体平面之间发生碰撞,效率较低,控制也不够精准。
技术实现思路
1、本发明提供一种臂架收回方法、臂架系统及作业机械,用以解决现有技术中依靠人工控制避免臂架末端的作业工具或各节臂架的末端与地面或车体平面之间发生碰撞,效率较低,控制也不够准确的缺陷,实现控制臂架自动收回,具有较高的工作效率,同时也能够避免臂架之间或者臂架与车体平面发生碰撞,安全可靠。
2、本发明提供一种臂架收回方法,包括:
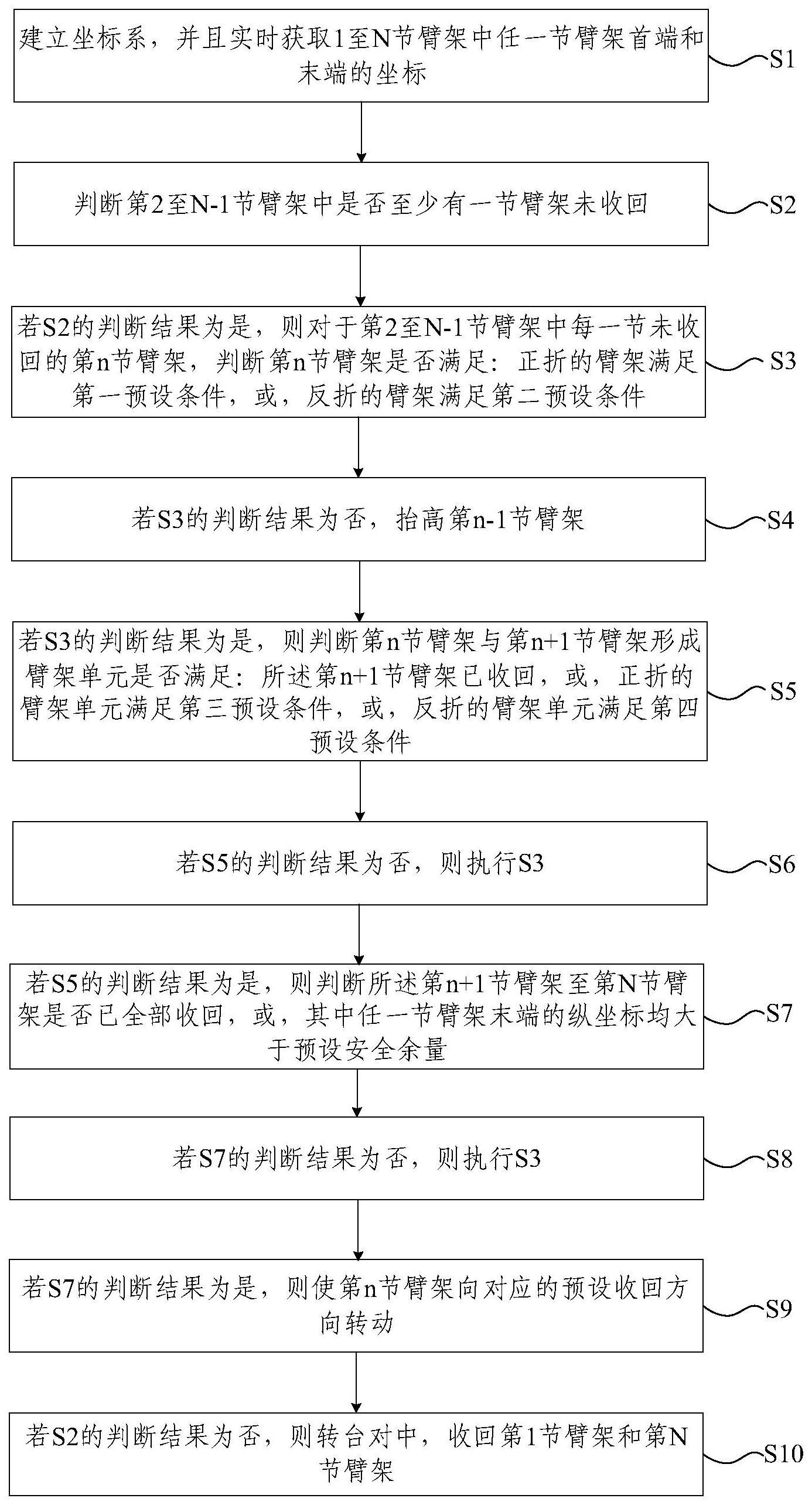
3、s1、建立坐标系,并且实时获取1至n节臂架中任一节臂架首端和末端的坐标;
4、s2、判断第2至n-1节臂架中是否至少有一节臂架未收回;
5、s3、若s2的判断结果为是,则对于第2至n-1节臂架中每一节未收回的第n节臂架,判断第n节臂架是否满足:正折的臂架满足第一预设条件,或,反折的臂架满足第二预设条件;
6、s4、若s3的判断结果为否,抬高第n-1节臂架;
7、s5、若s3的判断结果为是,则判断第n节臂架与第n+1节臂架形成臂架单元是否满足:所述第n+1节臂架已收回,或,正折的臂架单元满足第三预设条件,或,反折的臂架单元满足第四预设条件;
8、s6、若s5的判断结果为否,则执行s3;
9、s7、若s5的判断结果为是,则判断所述第n+1节臂架至第n节臂架是否已全部收回,或,其中任一节臂架末端的纵坐标均大于预设安全余量;
10、s8、若s7的判断结果为否,则执行s3;
11、s9、若s7的判断结果为是,则使第n节臂架向对应的预设收回方向转动;
12、s10、若s2的判断结果为否,则转台对中,收回第1节臂架和第n节臂架;
13、其中,所述第一预设条件包括:第n节臂架首端横坐标大于第n节臂架末端横坐标,或,第n节臂架首端纵坐标大于第n节臂架长度与预设安全余量之和;
14、所述第二预设条件包括:第n节臂架首端横坐标小于第n节臂架末端横坐标、第n节臂架首端纵坐标小于第n节臂架末端纵坐标,或,第n节臂架首端纵坐标大于第n节臂架长度与预设安全余量之和;
15、所述第三预设条件包括:臂架单元的首端横坐标大于所述臂架单元末端横坐标,或,所述臂架单元首端纵坐标大于所述臂架单元长度与预设安全余量之和;
16、所述第四预设条件包括:所述臂架单元首端横坐标小于所述臂架单元末端横坐标、所述臂架单元首端纵坐标小于所述臂架单元末端纵坐标,或,所述臂架单元首端纵坐标大于所述臂架单元长度与预设安全余量之和。
17、根据本发明提供的一种臂架收回方法,在第2至n-1节臂架中:
18、满足收回条件的所述臂架同时收回且不破坏其他臂架的收回条件;
19、不满足收回条件的所述臂架暂停收回动作或抬高所述臂架的前一节臂架。
20、根据本发明提供的一种臂架收回方法,所述实时获取1至n节臂架中任一节臂架首端和末端的坐标之前,还包括:
21、复位第n节臂架上的作业工具;
22、展第n节臂架至安全角度。
23、根据本发明提供的一种臂架收回方法,所述实时获取1至n节臂架中任一节臂架首端和末端的坐标,包括:
24、获取第1节臂架的首端坐标;
25、实时获取1至n节臂架中任一节臂架的角度信息;
26、基于任一节臂架首端的坐标和对应的角度信息实时获取所述臂架末端的坐标。
27、根据本发明提供的一种臂架收回方法,在所述坐标系中,以第1节臂架的首端坐标为坐标原点。
28、根据本发明提供的一种臂架收回方法,所述角度信息为所述臂架与预设基准面之间的夹角。
29、本发明还提供一种臂架系统,适于执行上述任一种臂架回收方法,包括:
30、多节臂架,所述多节臂架之间依次连接;
31、多个检测单元,每个所述检测单元设置在一节臂架上,用于实时检测所述臂架的位置;
32、多个驱动单元,每个所述驱动单元设置在相邻的两节臂架之间,用于驱动相邻的两节所述臂架之间相对转动;
33、控制单元,所述控制单元与所述检测单元、所述驱动单元分别电连接,用于基于所述检测单元检测到的所述臂架的位置,实时控制所述驱动单元。
34、根据本发明提供的一种臂架系统,所述多节臂架之间采用正折结构或反折结构连接。
35、根据本发明提供的一种臂架系统,所述检测单元包括:
36、倾角传感器,用于实时检测所述臂架与预设基准面之间的夹角。
37、本发明还提供一种作业机械,包括上述任一种臂架系统。
38、本发明实施例提供的臂架收回方法,通过建立坐标系,形成了一个坐标基准,对于每一节未收回的臂架,通过实时检测该节臂架末端坐标与首端坐标之间的相对关系,以及比较该节臂架首端高度与臂架长度和安全余量之和的大小,可以判断该臂架转动后是否会与车体平面发生碰撞。对于任意一节臂架,在不具备转动条件时,抬高前一节臂后再继续判断,直到具备转动条件后,自动收回臂架。通过这种方法可以控制多节臂架同时自动收回,具有较高的工作效率,同时也能够避免臂架之间或者臂架与车体平面发生碰撞,安全可靠。
39、在本发明实施例提供的臂架系统及作业机械中,由于应用了如上所述的臂架收回方法,因此同样具备如上所述的各项优势,在此不再赘述。
40、本发明实施例的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明实施例的实践了解到。
技术特征:
1.一种臂架收回方法,其特征在于,包括:
2.根据权利要求1所述的臂架收回方法,其特征在于,在第2至n-1节臂架中:
3.根据权利要求1所述的臂架收回方法,其特征在于,所述实时获取1至n节臂架中任一节臂架首端和末端的坐标之前,还包括:
4.根据权利要求1至3任一项所述的臂架收回方法,其特征在于,所述实时获取1至n节臂架中任一节臂架首端和末端的坐标,包括:
5.根据权利要求4所述的臂架收回方法,其特征在于,在所述坐标系中,以第1节臂架的首端坐标为坐标原点。
6.根据权利要求4所述的臂架收回方法,其特征在于,所述角度信息为所述臂架与预设基准面之间的夹角。
7.一种臂架系统,适于执行如权利要求1-6任一项所述的臂架回收方法,其特征在于,包括:
8.根据权利要求7所述的臂架系统,其特征在于,所述多节臂架之间采用正折结构或反折结构连接。
9.根据权利要求7所述的臂架系统,其特征在于,所述检测单元包括:
10.一种作业机械,其特征在于,包括权利要求7至9任一项所述的臂架系统。
技术总结
本发明涉及机械控制技术领域,提供一种臂架收回方法、臂架系统及作业机械。该臂架收回方法,通过建立坐标系,形成了一个坐标基准,对于每一节未收回的臂架,通过实时检测该节臂架末端坐标与首端坐标之间的相对关系,以及比较该节臂架首端高度与臂架长度和安全余量之和的大小,可以判断该臂架转动后是否会与车体平面发生碰撞。对于任意一节臂架,在不具备转动条件时,抬高前一节臂后再继续判断,直到具备转动条件后,自动收回臂架。通过这种方法可以控制多节臂架同时自动收回,具有较高的工作效率,同时也能够避免臂架之间或者臂架与车体平面发生碰撞,安全可靠。
技术研发人员:潘浩,王光磊,张超敏
受保护的技术使用者:三一汽车制造有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!